一种基于红外图形的机器人定位的方法与流程
1.本发明属于机器人技术领域,具体是涉及一种基于红外图形的机器人定位的方法。
背景技术:
2.目前室内机器人自主行走主要是采用激光雷达slam导航定位和视觉vslam导航定位以及用视觉vslam识别室内天花板上的二维码。激光雷达slam方式在复杂的动态环境下,因不能有效采集地面信息导致无法定位和导航;视觉vslam导航定位由于计算量过大,导致机器人成本较高,并且电能消耗较大减小机器人的续航能力;用视觉vslam识别室内天花板上的二维码,需要在室内天花板上粘贴二维码,其缺陷在于实施难度大、施工成本高、影响现场美观,光照度较大时不能准确识别出二维码。
技术实现要素:
3.为了克服上述现有技术的不足,本发明提供了一种基于红外图形的机器人定位的方法。
4.本发明的目的通过以下技术方案实现:
5.一种基于红外图形的机器人定位的方法,其特征在于:所述的一种基于红外图形的机器人定位的方法由r个机器人和n个检测点实施;其实施步骤如下:
6.a.1、构建三维地图m3;
7.构建三维地图m3的步骤如下:
8.a.1.1、机器人r在所述的室内仅有固定物体时,建立用于机器人自主行走的二维地图m2;r是机器人的编号,r∈rs;rs是机器人编号的集合,rs={r|r=1,2,...,r},r是机器人的数量,r≥1;机器人是指室内机器人;固定物体是指在所述的室内固定不动的物体;
9.a.1.2、处理器cr得到三维地图m3;
10.处理器cr得到三维地图m3的步骤如下:
11.a.1.2.1、处理器cr设置如下数据:(1)记录数据编号i的初值i=0;(2)检测点n编号n的初值n=1;处理器cr是机器人r中的处理器;每个检测点n均由处理器dn、采集设备n、无线网络设备wdn组成,ns是检测点编号n的集合,ns={n|n=1,2,...,n},n是检测点的数量,n≥1;每个采集设备n是采集图像的设备,采集图像的范围是区域n,图像是指视频图像和红外图像,并且每个区域n一一对应范围n,
12.a.1.2.2、使机器人r处在行走范围n的起点(x
n0
,y
n0
);范围n是机器人规划路径全部范围中的一个部分范围或是全部的范围;范围n的编号是机器人r按二维地图m2依方向wd行走,根据先后到达范围的顺序进行的编号,方向wd是顺时针方向或是逆时针方向;范围1,范围2,...,范围n组成机器人规划路径的全部范围;
13.a.1.2.3、在所述的室内仅有固定物体时,控制机器人r进行遍及范围n的行走;当机器人r在进行所述的行走期间,处理器cr在每个时刻ti均控制激光器r向上发射一个红外
图形g,g的外形尺寸为g
size
;向上是指向机器人r的正上方的天花板,正上方是指机器人r建立二维地图m2时机器人r中心的正上方;天花板是指能在其上形成红外图形g的室内天花板;红外图形是指由红外光形成的图形;gs
min
≤g
size
≤gs
max
,gs
min
是每个检测点n从区域n上的图像中均能识别出g的最小外形尺寸,gs
max
是机器人r处在二维地图m2中不同坐标点时,每个检测点n均能从图像中识别出g且能生成不同的三维地图数据的最大外形尺寸,每个区域n的范围均包含机器人在范围n行走时发射全部红外图形g的范围,激光器r每次发射图形g的时长为tc,发射的时间间隔ts=t
i+1-ti,2*ft≤tc<ts,ft是采集设备n采集一帧图像的时长;激光器r是指机器人r中的红外激光器;
14.a.1.2.4、处理器cr从检测点n得到图像数据(xgi,ygi);
15.a.1.2.5、处理器cr得到一个三维地图数据;
16.处理器cr得到一个三维地图数据的步骤如下:
17.a.1.2.5.1、处理器cr从导航系统r中获取机器人r所处位置在二维地图m2中的坐标点,并记录该坐标点为(xi,yi);导航系统r是指机器人r中的导航系统;
18.a.1.2.5.2、处理器cr记录三维地图数据[xi,yi,xgi,ygi,n];n是区域的编号;
[0019]
a.1.2.6、处理器cr对i加1;
[0020]
a.1.2.7、如果处理器cr判断机器人r已经完成遍及范围n的行走,则转步骤a.1.2.8;否则转步骤a.1.2.3;机器人r已经完成遍及范围n的行走是指机器人r已经行走完范围n上的kn条边界路径,或者还包括已经行走完范围n上的mn条范围内路径;
[0021]
a.1.2.8、处理器cr对n加1;
[0022]
a.1.2.9、如果处理器cr判断n>n,则转步骤a.1.2.10;否则转步骤a.1.2.2;
[0023]
a.1.2.10、处理器cr设置记录三维地图数据的数量i=i;
[0024]
a.1.2.11、处理器cr结束得到三维地图m3的处理;
[0025]
a.1.3、处理器cr用无线网络设备wer通过网络将二维地图m2和三维地图m3传输给其它的机器人t,t≠r,t=1,2,...,r;三维地图m3是指记录三维地图数据的数量i和每个记录数据[xi,yi,xgi,ygi,n],i=0,1,...,i-1,n是区域的编号;无线网络设备wer是机器人r中的无线网络设备;
[0026]
a.2、机器人的定位处理;
[0027]
机器人的定位处理的步骤如下:
[0028]
a.2.1、机器人r按二维地图m2自主行走;r∈rs;
[0029]
a.2.2、机器人r在自主行走期间,如果处理器cr判断导航数据相差较大,则转步骤a.2.3;否则转步骤a.2.1;导航数据相差较大是指导航系统r上的传感器在机器人r现在所处位置检测到的环境数据与建立二维地图m2时所检测到的环境数据相差较大;
[0030]
a.2.3、如果处理器cr判断机器人r与检测点n通讯有效,则转步骤a.2.4;否则转步骤a.2.1;机器人r与检测点n通讯有效是指机器人r与检测点n进行通讯,并在检测图形的完整性后,处理器cr仍保存着所接收的检测点n的回复信息rn;
[0031]
a.2.4、机器人r得到定位数据;
[0032]
机器人r得到定位数据的步骤如下:
[0033]
a.2.4.1、处理器cr控制机器人r停止行走;
[0034]
a.2.4.2、处理器cr从导航系统r中获取机器人r现在所处位置在二维地图m2中的
坐标点,并记录该坐标点为(x
p
,y
p
);
[0035]
a.2.4.3、处理器cr控制激光器r向上发射一个红外图形g,发射红外图形g的时长为tc,发射的时间间隔为ts,发射的次数是qf,1≤qf≤100;
[0036]
a.2.4.4、处理器cr从检测点n得到图像数据(xgr,ygr);
[0037]
a.2.4.5、处理器cr用公式(1)计算出机器人r在二维地图m2中的实际坐标点(xr,yr);
[0038]
xr=x
i1
+dx
[0039]
yr=y
i1
+dy
[0040][0041][0042]
α=tan-1
[|(xg
r-xg
i1
)/(yg
r-yg
i1
)|]
[0043]
sv=[(x
i2-x
i1
)2+(y
i2-y
i1
)2]
1/2
*[(xg
r-xg
i1
)2+(yg
r-yg
i1
)2]
1/2
/[(xg
i2-xg
i1
)2+(yg
i2-yg
i1
)2]
1/2
ꢀꢀꢀ
(1)
[0044]
(1)式中,int[]是取整运算;x
i1
,y
i1
,xg
i1
,yg
i1
是三维地图m3中记录点[x
i1
,y
i1
,xg
i1
,yg
i1
,n]中的数据;x
i2
,y
i2
,xg
i2
,yg
i2
是三维地图m3中记录点[x
i2
,y
i2
,xg
i2
,yg
i2
,n]中的数据;(xg
i1
,yg
i1
)与(xg
i2
,yg
i2
)是(xgr,ygr)8邻域中对称区里到(xgr,ygr)距离最近的两个点,并且d1≤d2;d1是(xg
i1
,yg
i1
)到(xgr,ygr)距离,d2是(xg
i2
,yg
i2
)到(xgr,ygr)距离;8邻域是指与点相邻的周围8个点所围成的区域,对称区是指对称点区域,对称点是指8邻域中的处在对角的两个点,或处在x方向上的两个点,或处在y方向上的两个点,对称点区域是指对称点和8邻域中与对称点相邻的两个点所围区域;
[0045]
a.2.5、如果处理器cr判断(xr,yr)到(x
p
,y
p
)的距离d
rp
≥mind,则转步骤a.2.6;否则转步骤a.2.7;rc≤mind≤3*rc;rc是二维地图m2中的一个坐标单位;
[0046]
a.2.6、处理器cr用(xr,yr)修改机器人r的导航数据中的原坐标点(x
p
,y
p
);
[0047]
a.2.7、处理器r控制机器人r重新开始自主行走;本步骤执行后转步骤a.2.1。
[0048]
所述的一种基于红外图形的机器人定位的方法,其特征在于:所述的处理器cr从检测点n得到图像数据(xgj,ygj)的步骤如下:
[0049]
b.1、采集设备n采集区域n上的图像gfn,并将图像gfn传输给处理器dn;
[0050]
b.2、处理器dn处理图像得到图像数据(xgj,ygj);处理器dn处理图像是指处理器dn用其内的软件用神经网络的算法处理图像gfn,或者还包括用图像分析的算法处理图像gfn;
[0051]
处理器dn处理图像得到图像数据(xgj,ygj)的步骤如下:
[0052]
b.2.1、处理器dn从图像gfn中识别所述的红外图形g;
[0053]
b.2.2、如果处理器dn从图像gfn中没有识别到图形g,或者识别到的图形g没有全部在区域n内,则转步骤b.2.3;否则转b.2.4;
[0054]
b.2.3、处理器dn设置图像数据(xgj,ygj)=(-1,-1);设置后转步骤b.2.6;
[0055]
b.2.4、处理器dn计算图形g的几何中心在坐标系n中的坐标点(xc,yc);坐标系n是指采集设备n的图像像素坐标系;
[0056]
b.2.5、用公式(2)计算xgj与ygj:
[0057]
xgj=int[x0(n)+xc*cosa
n-yc*sinan+0.5]
[0058]
ygj=int[y0(n)+xc*sinan+yc*cosan+0.5]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0059]
(2)式中,(x0(n),y0(n))是坐标系n原点在二维地图m2坐标系的坐标点,an是二维地图m2坐标系的x轴旋转到坐标系n的x轴的角度;
[0060]
b.2.6、处理器dn结束本步骤的处理;
[0061]
b.3、处理器dn用无线网络设备mdn通过网络将图像数据(xgj,ygj)传输给处理器cr。
[0062]
所述的一种基于红外图形的机器人定位的方法,其特征在于:所述的机器人r与检测点n通讯有效的步骤如下:
[0063]
c.1、处理器cr从三维地图m3中找到距(x
p
,y
p
)距离最近的点(x
ip
,y
ip
),并从记录数据[x
ip
,yip,xg
ip
,yg
ip
,m]中取出m;(x
ip
,y
ip
)是(x
p
,y
p
)8路径邻域中到(x
p
,y
p
)距离最近的点,路径邻域是指三维地图m3中有记录点的邻域;
[0064]
c.2、处理器cr设置通讯数据;
[0065]
处理器cr设置通讯数据的步骤如下:
[0066]
c.2.1、处理器cr设置nstr=max(m-1,1)和nend=min(m+1,n);
[0067]
c.2.2、处理器cr设置集合ms;设置处理如下:如果2≤m≤n-1,则ms={n1,n2,n3}并且n1,n2,n3分别等于m,nend,nstr;如果1=m∧m≤n-1,则ms={n1,n2}并且n1,n2分别等于m,nend;如果2≤m∧m=n,则ms={n1,n2}并且n1,n2分别等于m,nstr;如果n=1,则ms={n1}并且n1等于m;
[0068]
c.2.3、处理器cr设置集合ms中元素序号j的初值j=1,并设置j=|ms|,j是集合ms中元素的数量;
[0069]
c.3、机器人r与检测点通讯和检测图形完整性的处理;
[0070]
机器人r与检测点通讯和检测图形完整性的处理的步骤如下:
[0071]
c.3.1、处理器cr设置通讯次数q的初值q=1,并设置n=nj;nj∈ms,nj是集合ms中的第j个元素;
[0072]
c.3.2、处理器cr用无线网络设备wer通过网络向检测点n发送通讯信息pn;
[0073]
c.3.3、如果处理器dn用无线网络设备wdn通过网络接收到通讯信息pn,则转步骤c.3.4;否则转步骤c.3.5;
[0074]
c.3.4、处理器dn用无线网络设备wdn通过网络向机器人r发送回复信息rn;
[0075]
c.3.5、如果处理器cr用无线网络设备wer通过网络接收到回复信息rn,则转步骤c.3.6;否则转步骤c.3.7;
[0076]
c.3.6、检测图形的完整性;
[0077]
检测图形的完整性的步骤如下:
[0078]
c.3.6.1、处理器cr控制激光器r向上发射一个红外图形g,发射红外图形g的时长为tc,发射的时间间隔为ts,发射的次数是qc,1≤qc≤100;
[0079]
c.3.6.2、处理器cr从检测点n得到图像数据(xgd,ygd);
[0080]
c.3.6.3、如果处理器cr判断(xgd,ygd)=(-1,-1),则转步骤c.3.6.4;否则转步骤c.3.6.5;
[0081]
c.3.6.4、处理器cr删除处理器cr接收到的回复信息rn;
[0082]
c.3.6.5、处理器cr结束检测图形的完整性的处理;本步骤执行后转步骤c.3.9;
[0083]
c.3.7、处理器cr对q加1;
[0084]
c.3.8、如果处理器cr判断q<qr,则转步骤c.3.2;否则转步骤c.3.9;qr是设定进行通讯连接最大的次数,1≤qr≤1000;
[0085]
c.3.9、处理器cr结束机器人r与检测点通讯和检测图形完整性的处理;
[0086]
c.4、如果处理器cr判断处理器cr仍保存着所接收的回复信息rn,则转步骤c.7;否则转步骤c.5;
[0087]
c.5、处理器cr对j加1;
[0088]
c.6、如果处理器cr判断j>j,则转步骤c.7;否则转步骤c.3;
[0089]
c.7、处理器cr退出本步骤的处理。
[0090]
所述的一种基于红外图形的机器人定位的方法,其特征在于:所述的机器人r进行遍及范围n的行走是指机器人r进行kn条边界路径le
nk
的行走,或者还包括进行mn条范围内路径lf
nm
的行走,机器人r行走的速度是vs;每条边界路径le
nk
均是机器人r靠近范围n的边界k的行走路径,每条边界路径le
nk
到边界k的距离dk≤dk,并且每条边界路径的终点是下一条边界路径的起点,最后一条边界路径的终点是第一条边界路径的起点,k=1,2,...,kn,kn≥2,k是范围n边界的编号,边界k的编号是机器人r按二维地图m2依方向wd行走,根据先后到达边界的顺序进行的编号,kn是范围n边界的数量;rw/2≤dk≤sr*rw,1.00≤sr≤1.19;rw是机器人r的宽度;如果机器人r行走完kn条边界路径le
nk
后,条件a不成立,则机器人r还须进行mn条范围内路径lf
nm
的行走,使条件a成立,每条路径lf
nm
的起点与终点均在路径le
nk
上,m=1,2,...,mn,mn≥1,m是路径lf
nm
的编号,mn是路径lf
nm
的数量;条件a是满足dl
nkj
≤dm,dsn={dl
nkj
|满足条件p的距离};满足条件p的距离是同时满足如下两个条件的路径l
nk
与路径l
nj
之间的最大距离:
①
l
nk
与l
nj
不相交;
②
l
nk
与l
nj
之间没有其它路径,路径是指边界路径或是指范围内路径;rw/2≤dm≤rw;机器人r行走的速度为vs,ts*vs≤rd/dv,1≤dv≤10;ts是处理与记录一个三维地图m3的坐标点数据的时长,rd是二维地图m2中的坐标点到4邻域中的坐标点所对应的实际距离;4邻域是指位于点的上边、下边、左边、右边4个相邻点所围的区域。
[0091]
所述的一种基于红外图形的机器人定位的方法,其特征在于,所述的每个机器人r均由机器人本体r、处理器cr、红外激光器r、导航系统r、行走系统r、无线网络设备wer、电源系统r、供电接口r组成,r=1,2,...,r;处理器cr是满足所述的机器人r运行和使用以及满足图像处理与其它处理的处理器,处理器cr内安装有处理软件;处理器cr分别与红外激光器r、导航系统r、行走系统r、无线网络设备wer相连;电源系统r是向机器人提供各种电源的系统;电源系统r分别与处理器cr、红外激光器r、导航系统r、行走系统r、无线网络设备wer、供电接口r相连;当供电接口r通过机器人充电桩接通外界电源时,供电接口r对电源系统r内的蓄电池充电;机器人本体r内安装有处理器cr、红外激光器r、导航系统r、行走系统r、无线网络设备wer、电源系统r、供电接口r。
[0092]
所述的一种基于红外图形的机器人定位的方法,其特征在于:所述的每个检测点n均由处理器dn、采集设备n、无线网络设备wdn组成,n=1,2,...,n;处理器dn分别与采集设备n、无线网络设备wdn相连;处理器dn是满足图像处理和其它处理的处理器,处理器dn内安装有处理软件;每个采集设备n采集图像的区域n一一对应机器人规划路径的范围n;区域1,区域2,...,区域n覆盖所述的机器人规划路径全部范围正上方的全部区域,并且相邻的两个
区域在图像上相互重叠,重叠的范围至少包含机器人整个外形向地面垂直投影在m2中的范围所对应的在这两个相邻区域中相重叠的范围。
[0093]
本发明专利的显著进步和技术特点是机器人在建立二维地图后,机器人在进行遍及全部规划路径的行走期间,机器人向其正上方发射一系列红外图形,检测点用ai技术识别出这一系列图像中的图形和计算出这些图形的中心位置,并通过网络向机器人传输这些位置数据,机器人用从检测点获取的这一系列位置数据构建对应二维地图坐标点的三维地图;当机器人行走在复杂环境且其导航系统不能有效获取地面环境信息时,机器人停止行走并向其正上方发射红外图形,检测点用ai技术识别出这些图形并计算出其中心位置,机器人用从检测点获取的位置数据,并根据三维地图和二维地图的对应关系,准确地推算出机器人的实际位置;本发明的产品可广泛用于餐厅和酒店等环境复杂的服务场所,具有较好的经济效益和广阔的市场前景。
附图说明
[0094]
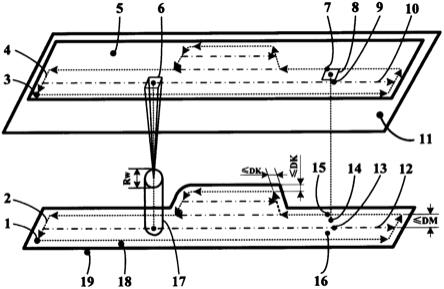
图1本发明的构建三维地图和机器人定位处理时地面与空间关系的示意图。
[0095]
图2本发明的机器人组成的示意图。
[0096]
图3本发明的检测点组成的示意图。
[0097]
图4本发明的机器人构建三维地图的流程图。
[0098]
图5本发明的机器人进行定位处理的流程图。
[0099]
图6本发明的机器人与检测点通讯和检测图形完整性的处理的流程图。
[0100]
图1中,(1)是范围n=2的机器人的行走起点(x
20
,y
20
),范围2是机器人规划路径全部范围中的一个部分范围;(2)是构建三维地图m3时,机器人行走的边界路径le
2k
,k=1,2,...,9,k2=9;(3)是天花板上对应起点(x
20
,y
20
)的点;天花板是指室内天花板;(4)是天花板上在m3中的坐标点的连线gle
2k
,gle
2k
中的坐标点分别一一对应边界路径le
2k
在m2中的坐标点;(5)是包含机器人在范围2行走时发射全部红外图形g的范围的区域,该区域被区域2所包含;区域2对应范围2;(6)是建立三维地图m3时,机器人r向其正上方的天花板发射的一个红外光图形g,g的外形是长方形,g的尺寸g
size
=50mm(w)*38mm(h),g的中心黑点是图形g的几何中心点;(7)是点(xg
i1
,yg
i1
),该点是(xgr,ygr)8邻域中到(xgr,ygr)距离为d1的点;(8)是机器人在定位处理时,由处理器d2检测到的红外图形g,其中心黑点是坐标点(xgr,ygr);(9)是点(xg
i2
,yg
i2
),该点是(xgr,ygr)8邻域中到(xgr,ygr)距离为d2的点,并且(xg
i1
,yg
i1
)与(xg
i2
,yg
i2
)是左上角与右下角的对称点,d1<d2;(10)是天花板上在m3中的坐标点的连线glf
2m
,glf
2m
中的坐标点分别一一对应范围内路径lf
2m
在m2中的坐标点;(11)是由不透明材料制成的天花板,该天花板上能形成红外光图形g;(12)是构建三维地图m3时,机器人行走的范围内路径lf
2m
,m=1,2,3,m2=3;(13)是点(xg
i2
,yg
i2
)在m2中的对应点(x
i2
,y
i2
);(14)是点(xgr,ygr)在m2中的对应点(xr,yr);(15)是点(xg
i1
,yg
i1
)在m2中的对应点(x
i1
,y
i1
);(16)是机器人5在定位处理时,处理器5从导航系统5获取的机器人5现在所处位置在二维地图m2中的坐标点(x
p
,y
p
);(17)是机器人,该机器人下面的黑点是机器人的中心点;(18)是范围2;(19)是范围2的9条边界k,k的编号是依逆时针行走进行的编号,k=1,2,...,9。
具体实施方式
[0101]
下面结合附图,详细叙述本发明的具体实施方式:
[0102]
所述的一种基于红外图形的机器人定位的方法由r个机器人和n个检测点实施;其实施步骤如下:
[0103]
例1、所述的一种基于红外图形的机器人定位的方法由5个机器人和6个检测点实施;其实施步骤如下:
[0104]
a.1、构建三维地图m3;
[0105]
例1、构建三维地图m3;
[0106]
构建三维地图m3的步骤如下:
[0107]
a.1.1、机器人r在所述的室内仅有固定物体时,建立用于机器人自主行走的二维地图m2;r是机器人的编号,r∈rs;rs是机器人编号的集合,rs={r|r=1,2,...,r},r是机器人的数量,r≥1;机器人是指室内机器人;固定物体是指在所述的室内固定不动的物体;
[0108]
例1、机器人r=3在所述的室内仅有固定物体时,建立用于机器人自主行走的二维地图m2;3是机器人的编号,3∈rs;rs={r|r=1,2,3,4,5},r是机器人的数量=5;
[0109]
a.1.2、处理器cr得到三维地图m3;
[0110]
例1、处理器c3得到三维地图m3;
[0111]
处理器cr得到三维地图m3的步骤如下:
[0112]
a.1.2.1、处理器cr设置如下数据:(1)记录数据编号i的初值i=0;(2)检测点n编号n的初值n=1;处理器cr是机器人r中的处理器;每个检测点n均由处理器dn、采集设备n、无线网络设备wdn组成,ns是检测点编号n的集合,ns={n|n=1,2,...,n},n是检测点的数量,n≥1;每个采集设备n是采集图像的设备,采集图像的范围是区域n,图像是指视频图像和红外图像,并且每个区域n一一对应范围n,
[0113]
例1、处理器c3设置如下数据:(1)记录数据编号i的初值i=0;(2)检测点n编号n的初值n=1;处理器c3是机器人3中的处理器;每个检测点n均由处理器dn、采集设备n、无线网络设备wdn组成,ns={n|n=1,2,...,6},n=6;
[0114]
a.1.2.2、使机器人r处在行走范围n的起点(x
n0
,y
n0
);范围n是机器人规划路径全部范围中的一个部分范围或是全部的范围;范围n的编号是机器人r按二维地图m2依方向wd行走,根据先后到达范围的顺序进行的编号,方向wd是顺时针方向或是逆时针方向;范围1,范围2,...,范围n组成机器人规划路径的全部范围;
[0115]
例1、使机器人3处在行走范围n的起点(x
n0
,y
n0
);范围n是机器人规划路径全部范围中的一个部分范围;范围n的编号是机器人r按二维地图m2按wd行走,根据先后到达范围的顺序进行的编号;方向wd是逆时针方向;范围1,范围2,...,范围6组成机器人规划路径的全部范围;
[0116]
a.1.2.3、在所述的室内仅有固定物体时,控制机器人r进行遍及范围n的行走;当机器人r在进行所述的行走期间,处理器cr在每个时刻ti均控制激光器r向上发射一个红外图形g,g的外形尺寸为g
size
;向上是指向机器人r的正上方的天花板,正上方是指机器人r建立二维地图m2时机器人r中心的正上方;天花板是指能在其上形成红外图形g的室内天花板;红外图形是指由红外光形成的图形;gs
min
≤g
size
≤gs
max
,gs
min
是每个检测点n从区域n上的图像中均能识别出g的最小外形尺寸,gs
max
是机器人r处在二维地图m2中不同坐标点时,
每个检测点n均能从图像中识别出g且能生成不同的三维地图数据的最大外形尺寸,每个区域n的范围均包含机器人在范围n行走时发射全部红外图形g的范围,激光器r每次发射图形g的时长为tc,发射的时间间隔ts=t
i+1-ti,2*ft≤tc<ts,ft是采集设备n采集一帧图像的时长;激光器r是指机器人r中的红外激光器;
[0117]
例1、在所述的室内仅有固定物体时,控制机器人3进行遍及范围n的行走;当机器人3在进行所述的行走期间,处理器c3在每个时刻ti均控制激光器3向上发射一个红外图形g,g的形状是长方形,g的外形尺寸为g
size
=50mm(w)*38mm(h);向上是指向机器人3的正上方的天花板,正上方是指机器人3建立二维地图m2时机器人3中心的正上方;天花板是指由不透明材料制作的能在其上形成红外图形g的室内天花板;红外图形是指由红外光形成的图形;gs
min
≤g
size
≤gs
max
,gs
min
=30mm(w)*23mm(h),gs
max
=93mm(w)*70mm(h),每个区域n的范围均包含机器人在范围n行走时发射全部红外图形g的范围,激光器3每次发射图形g的时长为tc=80ms,发射的时间间隔ts=200ms=t
i+1-ti,2*ft=80ms≤tc<ts,ft是采集设备n采集一帧图像的时长=40ms;激光器3是指机器人3中的红外激光器;
[0118]
a.1.2.4、处理器cr从检测点n得到图像数据(xgi,ygi);
[0119]
例1、处理器c3从检测点n得到图像数据(xgi,ygi);n依次=1,2,3,4,5,6;
[0120]
a.1.2.5、处理器cr得到一个三维地图数据;
[0121]
例1、处理器c3得到一个三维地图数据;
[0122]
处理器cr得到一个三维地图数据的步骤如下:
[0123]
a.1.2.5.1、处理器cr从导航系统r中获取机器人r所处位置在二维地图m2中的坐标点,并记录该坐标点为(xi,yi);导航系统r是指机器人r中的导航系统;
[0124]
例1、处理器c3从导航系统3中获取机器人3所处位置在二维地图m2中的坐标点,并记录该坐标点为(xi,yi);导航系统3是指机器人3中的导航系统;
[0125]
a.1.2.5.2、处理器cr记录三维地图数据[xi,yi,xgi,ygi,n];n是区域的编号;
[0126]
例1、处理器c3记录三维图数据[xi,yi,xgi,ygi,n];n是区域的编号;
[0127]
a.1.2.6、处理器cr对i加1;
[0128]
例1、处理器c3对i加1;
[0129]
a.1.2.7、如果处理器cr判断机器人r已经完成遍及范围n的行走,则转步骤a.1.2.8;否则转步骤a.1.2.3;机器人r已经完成遍及范围n的行走是指机器人r已经行走完范围n上的kn条边界路径,或者还包括已经行走完范围n上的mn条范围内路径;
[0130]
例1、如果处理器c3判断机器人3已经完成遍及范围n的行走,则转步骤a.1.2.8;否则转步骤a.1.2.3;机器人3已经完成遍及范围n的行走是指机器人3已经行走完范围n上的kn条边界路径,或者还包括已经行走完范围n上的mn条范围内路径;n=2时,机器人3已经完成遍及范围2的行走是指机器人3已经行走完范围2上的9条边界路径,还包括已经行走完范围2上的3条范围内路径;
[0131]
a.1.2.8、处理器cr对n加1;
[0132]
例1、处理器c3对n加1;n加1后,n依次=2,3,4,5,6,7;
[0133]
a.1.2.9、如果处理器cr判断n>n,则转步骤a.1.2.10;否则转步骤a.1.2.2;
[0134]
例1、如果处理器c3判断n>n=6,则转步骤a.1.2.10;否则转步骤a.1.2.2
[0135]
a.1.2.10、处理器cr设置记录三维地图数据的数量i=i;
[0136]
例1、处理器c3设置记录三维地图数据的数量i=i=1026;
[0137]
a.1.2.11、处理器cr结束得到三维地图m3的处理;
[0138]
例1、处理器c3结束得到三维地图m3的处理;
[0139]
a.1.3、处理器cr用无线网络设备wer通过网络将二维地图m2和三维地图m3传输给其它的机器人t,t≠r,t=1,2,...,r;三维地图m3是指记录三维地图数据的数量i和每个记录数据[xi,yi,xgi,ygi,n],i=0,1,...,i-1,n是区域的编号;无线网络设备wer是机器人r中的无线网络设备;
[0140]
例1、处理器c3用无线网络设备we3通过网络将二维地图m2和三维地图m3传输给其它的机器人t,t≠3,t=1,2,4,5;三维地图m3是指记录三维地图数据的数量i=1026和每个记录数据[xi,yi,xgi,ygi,n],i=0,1....,i-1=1025,n是区域的编号;无线网络设备we3是机器人3中的无线网络设备;
[0141]
a.2、机器人的定位处理;
[0142]
例k、k=2,3:机器人的定位处理;
[0143]
机器人的定位处理的步骤如下:
[0144]
a.2.1、机器人r按二维地图m2自主行走;r∈rs;
[0145]
例k、k=2,3:机器人r=5按二维地图m2自主行走;5∈rs;
[0146]
a.2.2、机器人r在自主行走期间,如果处理器cr判断导航数据相差较大,则转步骤a.2.3;否则转步骤a.2.1;导航数据相差较大是指导航系统r上的传感器在机器人r现在所处位置检测到的环境数据与建立二维地图m2时所检测到的环境数据相差较大;
[0147]
例2、机器人5在自主行走期间,处理器c5判断导航数据相差较小,转步骤a.2.1;
[0148]
例3、机器人5在自主行走期间,处理器c5判断导航数据相差较大,转步骤a.2.3;导航数据相差较大是指导航系统5上的激光测距雷达在机器人5现在所处位置检测到的环境数据与建立二维地图m2时所检测到的环境数据相差较大;
[0149]
a.2.3、如果处理器cr判断机器人r与检测点n通讯有效,则转步骤a.2.4;否则转步骤a.2.1;机器人r与检测点n通讯有效是指机器人r与检测点n进行通讯,并在检测图形的完整性后,处理器cr仍保存着所接收的检测点n的回复信息rn;
[0150]
例3、处理器c5判断机器人5与检测点2通讯有效,转步骤a.2.4;机器人5与检测点2通讯有效是指机器人5与检测点2进行通讯,并在检测图形的完整性后,处理器c5仍保存着所接收的检测点2的回复信息r2;
[0151]
a.2.4、机器人r得到定位数据;
[0152]
例3、机器人5得到定位数据;
[0153]
机器人r得到定位数据的步骤如下:
[0154]
a.2.4.1、处理器cr控制机器人r停止行走;
[0155]
例3、处理器c5控制机器人5停止行走;
[0156]
a.2.4.2、处理器cr从导航系统r中获取机器人r现在所处位置在二维地图m2中的坐标点,并记录该坐标点为(x
p
,y
p
);
[0157]
例3、处理器c5从导航系统5中获取机器人5现在所处位置在二维地图m2中的坐标点,并记录该坐标点为(x
p
,y
p
)=(208,179);
[0158]
a.2.4.3、处理器cr控制激光器r向上发射一个红外图形g,发射红外图形g的时长
为tc,发射的时间间隔为ts,发射的次数是qf,1≤qf≤100;
[0159]
例3、处理器c5控制激光器5向上发射一个红外图形g,tc=80ms,ts=200ms,qf=100;
[0160]
a.2.4.4、处理器cr从检测点n得到图像数据(xgr,ygr);
[0161]
例3、处理器c5从检测点2得到图像数据(xgr,ygr)=(356,276);
[0162]
a.2.4.5、处理器cr用公式(1)计算出机器人r在二维地图m2中的实际坐标点(xr,yr);
[0163]
xr=x
i1
+dx
[0164]
yr=y
i1
+dy
[0165][0166][0167]
α=tan-1
[|(xg
r-xg
i1
)/(yg
r-yg
i1
)|]
[0168]
sv=[(x
i2-x
i1
)2+(y
i2-y
i1
)2]
1/2
*[(xg
r-xg
i1
)2+(yg
r-yg
i1
)2]
1/2
/[(xg
i2-xg
i1
)2+(yg
i2-yg
i1
)2]
1/2
ꢀꢀ
(1)
[0169]
(1)式中,int[]是取整运算;x
i1
,y
i1
,xg
i1
,yg
i1
是三维地图m3中记录点[x
i1
,y
i1
,xg
i1
,yg
i1
,n]中的数据;x
i2
,y
i2
,xg
i2
,yg
i2
是三维地图m3中记录点[x
i2
,y
i2
,xg
i2
,yg
i2
,n]中的数据;(xg
i1
,yg
i1
)与(xg
i2
,yg
i2
)是(xgr,ygr)8邻域中对称区里到(xgr,ygr)距离最近的两个点,并且d1≤d2;d1是(xg
i1
,yg
i1
)到(xgr,ygr)距离,d2是(xg
i2
,yg
i2
)到(xgr,ygr)距离;8邻域是指与点相邻的周围8个点所围成的区域,对称区是指对称点区域,对称点是指8邻域中的处在对角的两个点,或处在x方向上的两个点,或处在y方向上的两个点,对称点区域是指对称点和8邻域中与对称点相邻的两个点所围区域;
[0170]
例3、处理器c5用公式(1)计算出机器人5在二维地图m2中的实际坐标点(xr,yr);
[0171]
xr=x
i1
+dx=209+1=210
[0172]
yr=y
i1
+dy=186-2=182
[0173]
dx=int[sinα*sv+0.5]=int[0.3163*2.354+0.5]=int[0.745+0.5]=1
[0174]
dy=-int[cosα*sv+0.5]=-int[0.9487*2.354+0.5]=-int[2.233+0.5]=-2
[0175]
α=tan-1
[|(xg
r-xg
i1
)/(yg
r-yg
i1
)|]=tan-1
[|(356-353)/(276-285)|]=18.44
°
[0176]
sv=[(x
i2-x
i1
)2+(y
i2-y
i1
)2]
1/2
*[(xg
r-xg
i1
)2+(yg
r-yg
i1
)2]
1/2
/[(xg
i2-xg
i1
)2+(yg
i2-yg
i1
)2]
1/2
[0177]
=[(211-209)2+(181-186)2]
1/2
*[(356-353)2+(276-285)2]
1/2
/[(360-353)2+(265-285)2]
1/2
[0178]
=5.385*9.487/21.190=2.354;
[0179]
(1)式中,x
i1
=209,y
i1
=186,xg
i1
=353,yg
i1
=285是三维地图m3中记录点[x
i1
,y
i1
,xg
i1
,yg
i1
,2]中的数据;x
i2
=211,y
i2
=181,xg
i2
=360,yg
i2
=265是三维地图m3中记录点[x
i2
,y
i2
,xg
i2
,yg
i2
,2]中的数据;(xg
i1
,yg
i1
)与(xg
i2
,yg
i2
)是(xgr,ygr)8邻域中对称区里的两个点,对称点是左上角点与右下角点,并且d1=9.487≤d2=11.705;d1与d2的计算如下:
[0180]
d1=[(xg
r-xg
i1
)2+(yg
r-yg
i1
)2]
1/2
=[(356-353)2+(276-285)2]
1/2
=[32+92]
1/2
=
9.487;
[0181]
d2=[(xg
r-xg
i2
)2+(yg
r-yg
i2
)2]
1/2
=[(356-360)2+(276-265)2]
1/2
=[42+112]
1/2
=11.705;
[0182]
a.2.5、如果处理器cr判断(xr,yr)到(x
p
,y
p
)的距离d
rp
≥mind,则转步骤a.2.6;否则转步骤a.2.7;rc≤mind≤3*rc;rc是二维地图m2中的一个坐标单位;
[0183]
例3、处理器c5判断点距离d
rp
=[22+32]
1/2
=3.61≥mind=1.50,转步骤a.2.6;
[0184]
a.2.6、处理器cr用(xr,yr)修改机器人r的导航数据中的原坐标点(x
p
,y
p
);
[0185]
例3、处理器c5用(xr,yr)=(210,182)修改机器人5的原坐标点(x
p
,y
p
)=(208,179);
[0186]
a.2.7、处理器r控制机器人r重新开始自主行走;本步骤执行后转步骤a.2.1。
[0187]
例3、处理器c5控制机器人5重新开始自主行走;本步骤执行后转步骤a.2.1。
[0188]
所述的处理器cr从检测点n得到图像数据(xgj,ygj)的步骤如下:
[0189]
b.1、采集设备n采集区域n上的图像gfn,并将图像gfn传输给处理器dn;
[0190]
例1、采集设备n采集区域n上的图像gfn,并将图像gfn传输给处理器dn;
[0191]
例3、采集设备2采集区域2上的图像gf2,并将图像gf2传输给处理器d2;
[0192]
b.2、处理器dn处理图像得到图像数据(xgj,ygj);处理器dn处理图像是指处理器dn用其内的软件用神经网络的算法处理图像gfn,或者还包括用图像分析的算法处理图像gfn;
[0193]
例1、处理器dn处理图像得到图像数据(xgi,ygi);处理器dn处理图像是指处理器dn用其内的软件用神经网络的算法处理图像gfn,还包括用图像分析的算法处理图像gfn;
[0194]
例3、处理器d2处理图像得到图像数据(xgr,ygr);处理器d2处理图像是指处理器d2用其内的软件用神经网络的算法处理图像gf2,还包括用图像分析的算法处理图像gf2;
[0195]
处理器dn处理图像得到图像数据(xgj,ygj)的步骤如下:
[0196]
b.2.1、处理器dn从图像gfn中识别所述的红外图形g;
[0197]
例1、处理器dn从图像gfn中识别所述的红外图形g;
[0198]
例3、处理器d2从图像gf2中识别所述的红外图形g;
[0199]
b.2.2、如果处理器dn从图像gfn中没有识别到图形g,或者识别到的图形g没有全部在区域n内,则转步骤b.2.3;否则转b.2.4
[0200]
例1、如果处理器dn从图像gfn中没有识别到图形g,或者识别到的图形g没有全部在区域n内,则转步骤b.2.3;否则转b.2.4;
[0201]
例3、处理器d2从图像gf2中识别到图形g,并且识别到的图形g全部在区域2内,转步骤b.2.4;
[0202]
b.2.3、处理器dn设置图像数据(xgj,ygj)=(-1,-1);设置后转步骤b.2.6;
[0203]
例1、处理器dn设置图像数据(xgj,ygj)=(-1,-1);设置后转步骤b.2.6;
[0204]
b.2.4、处理器dn计算图形g的几何中心在坐标系n中的坐标点(xc,yc);坐标系n是指采集设备n的图像像素坐标系;
[0205]
例1、处理器dn计算图形g的几何中心在坐标系n中的坐标点(xc,yc);
[0206]
例3、处理器d2计算图形g的几何中心在坐标系2中的坐标点(xc,yc)=(175,63);
[0207]
b.2.5、用公式(2)计算xgj与ygj:
[0208]
xgj=int[x0(n)+xc*cosa
n-yc*sinan+0.5]
[0209]
ygj=int[y0(n)+xc*sinan+yc*cosan+0.5]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0210]
(2)式中,(x0(n),y0(n))是坐标系n原点在二维地图m2坐标系的坐标点,an是二维地图m2坐标系的x轴旋转到坐标系n的x轴的角度;
[0211]
例1、用公式(2)计算xgi与ygi:
[0212]
xgi=int[x0(n)+xc*cosa
n-yc*sinan+0.5]
[0213]
ygi=int[y0(n)+xc*sinan+yc*cosan+0.5]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0214]
例3、用公式(2)计算xgr与ygr:
[0215]
xgr=int[x0(2)+xc*cosa
2-yc*sina2+0.5]
[0216]
=int[249+175*0.817-63*0.576+0.5]=int[355.687+0.5]=356
[0217]
ygr=int[y0(2)+xc*sina2+yc*cosa2+0.5]
[0218]
=int[124+175*0.576+63*0.817+0.5]=int[276.271+0.5]=276
ꢀꢀꢀ
(2)
[0219]
(2)式中,(x0(2),y0(2))是坐标系2原点在二维地图m2坐标系的坐标点=(249,124),
[0220]
a2是二维地图m2坐标系的x轴旋转到坐标系2的x轴的角度=35.20
°
;
[0221]
b.2.6、处理器dn结束本步骤的处理;
[0222]
例1、处理器dn结束本步骤的处理;
[0223]
例3、处理器d2结束本步骤的处理;
[0224]
b.3、处理器dn用无线网络设备wdn通过网络将图像数据(xgj,ygj)传输给处理器cr。
[0225]
例1、处理器dn用无线网络设备wdn通过网络将图像数据(xgi,ygi)传输给处理器c3。
[0226]
例3、处理器d2用无线网络设备wd2通过网络将图像数据(xgr,ygr)传输给处理器c5。
[0227]
所述的机器人r与检测点n通讯有效的步骤如下:
[0228]
c.1、处理器cr从三维地图m3中找到距(x
p
,y
p
)距离最近的点(x
ip
,y
ip
),并从记录数据[x
ip
,y
ip
,xg
ip
,yg
ip
,m]中取出m;(x
ip
,y
ip
)是(x
p
,y
p
)8路径邻域中到(x
p
,y
p
)距离最近的点,路径邻域是指三维地图m3中有记录点的邻域;
[0229]
例3、处理器c5从三维地图m3中找到距(x
p
,y
p
)距离最近的点(x
ip
,y
ip
),并从记录数据[x
ip
,y
ip
,xg
ip
,yg
ip
,2]中取出2;(x
ip
,y
ip
)是(x
p
,y
p
)8路径邻域中到(x
p
,y
p
)距离最近的点;
[0230]
c.2、处理器cr设置通讯数据;
[0231]
例3、处理器c5设置通讯数据;
[0232]
处理器cr设置通讯数据的步骤如下:
[0233]
c.2.1、处理器cr设置nstr=max(m-1,1)和nend=min(m+1,n);
[0234]
例3、处理器c5设置设置nstr=max(m=1,1)=1和nend=min(m+1,n)=3;
[0235]
c.2.2、处理器cr设置集合ms;设置处理如下:如果2≤m≤n-1,则ms={n1,n2,n3}并且n1,n2,n3分别等于m,nend,nstr;如果1=m∧m≤n-1,则ms={n1,n2}并且n1,n2分别等于m,nend;如果2≤m∧m=n,则ms={n1,n2}并且n1,n2分别等于m,nstr;如果n=1,则ms={n1}并且n1等于m;
[0236]
例3、处理器c5设置集合ms={n1,n2,n3}并且n1,n2,n3分别等于2,3,1;
[0237]
c.2.3、处理器cr设置集合ms中元素序号j的初值j=1,并设置j=|ms|,j是集合ms中元素的数量;
[0238]
例3、处理器c5设置集合ms中元素序号j的初值j=1,并设置j=|ms|=3;
[0239]
c.3、机器人r与检测点通讯和检测图形完整性的处理;
[0240]
例3、机器人5与检测点通讯和检测图形完整性的处理;
[0241]
机器人r与检测点通讯和检测图形完整性的处理的步骤如下:
[0242]
c.3.1、处理器cr设置通讯次数q的初值q=1,并设置n=nj;nj∈ms,nj是集合ms中的第j个元素;
[0243]
例3、处理器c5设置q=1,并设置n=nj;nj∈ms;j=1时,n=n1=2;
[0244]
c.3.2、处理器cr用无线网络设备wer通过网络向检测点n发送通讯信息pn;
[0245]
例3、处理器c5用无线网络设备we5通过网络向检测点2发送通讯信息p2;
[0246]
c.3.3、如果处理器dn用无线网络设备wdn通过网络接收到通讯信息pn,则转步骤c.3.4;否则转步骤c.3.5;
[0247]
例3、处理器d2用无线网络设备wd2通过网络接收到通讯信息p2,转步骤c.3.4;
[0248]
c.3.4、处理器dn用无线网络设备wdn通过网络向机器人r发送回复信息rn;
[0249]
例3、处理器d2用无线网络设备wd2通过网络向机器人5发送回复信息r2;
[0250]
c.3.5、如果处理器cr用无线网络设备wer通过网络接收到回复信息rn,则转步骤c.3.6;否则转步骤c.3.7;
[0251]
例3、处理器c5用无线网络设备we5通过网络接收到回复信息r2,转步骤c.3.6;
[0252]
c.3.6、检测图形的完整性;
[0253]
例3、检测图形的完整性;
[0254]
检测图形的完整性的步骤如下:
[0255]
c.3.6.1、处理器cr控制激光器r向上发射一个红外图形g,发射红外图形g的时长为tc,发射的时间间隔为ts,发射的次数是qc,1≤qc≤100;
[0256]
例3、处理器c5控制激光器5向上发射一个红外图形g,tc=80ms,ts=200ms,qc=10;
[0257]
c.3.6.2、处理器cr从检测点n得到图像数据(xgd,ygd);
[0258]
例3、处理器c5从检测点2得到图像数据(xgd,ygd);
[0259]
c.3.6.3、如果处理器cr判断(xgd,ygd)=(-1,-1),则转步骤c.3.6.4;否则转步骤c.3.6.5;
[0260]
例3、处理器cr判断(xgd,ygd)≠(-1,-1),转步骤c.3.6.5;
[0261]
c.3.6.4、处理器cr删除处理器cr接收到的回复信息rn;
[0262]
c.3.6.5、处理器cr结束检测图形的完整性的处理;本步骤执行后转步骤c.3.9;
[0263]
例3、处理器c5结束检测图形的完整性的处理;本步骤执行后转步骤c.3.9;
[0264]
c.3.7、处理器cr对q加1;
[0265]
c.3.8、如果处理器cr判断q<qr,则转步骤c.3.2;否则转步骤c.3.9;qr是设定进行通讯连接最大的次数,1≤qr≤1000;
[0266]
c.3.9、处理器cr结束机器人r与检测点通讯和检测图形完整性的处理;
[0267]
例3、处理器c5结束机器人5与检测点通讯和检测图形完整性的处理;
[0268]
c.4、如果处理器cr判断处理器cr仍保存着所接收的回复信息rn,则转步骤c.7;否则转步骤c.5;
[0269]
例3、处理器c5判断处理器c5仍保存着所接收的回复信息r2,转步骤c.7;
[0270]
c.5、处理器cr对j加1;
[0271]
c.6、如果处理器cr判断j>j,则转步骤c.7;否则转步骤c.3;
[0272]
c.7、处理器cr退出本步骤的处理。
[0273]
例3、处理器c5退出本步骤的处理。
[0274]
所述的机器人r进行遍及范围n的行走是指机器人r进行kn条边界路径le
nk
的行走,或者还包括进行mn条范围内路径lf
nm
的行走,机器人r行走的速度是vs;每条边界路径le
nk
均是机器人r靠近范围n的边界k的行走路径,每条边界路径le
nk
到边界k的距离dk≤dk,并且每条边界路径的终点是下一条边界路径的起点,最后一条边界路径的终点是第一条边界路径的起点,k=1,2,...,kn,kn≥2,k是范围n边界的编号,边界k的编号是机器人r按二维地图m2依方向wd行走,根据先后到达边界的顺序进行的编号,kn是范围n边界的数量;rw/2≤dk≤sr*rw,1.00≤sr≤1.19;rw是机器人r的宽度;如果机器人r行走完kn条边界路径le
nk
后,条件a不成立,则机器人r还须进行mn条范围内路径lf
nm
的行走,使条件a成立,每条路径lf
nm
的起点与终点均在路径le
nk
上,m=1,2,...,mn,mn≥1,m是路径lf
nm
的编号,mn是路径lf
nm
的数量;条件a是满足dl
nkj
≤dm,dsn={dl
nkj
|满足条件p的距离};满足条件p的距离是同时满足如下两个条件的路径l
nk
与路径l
nj
之间的最大距离:
①
l
nk
与l
nj
不相交;
②
l
nk
与l
nj
之间没有其它路径,路径是指边界路径或是指范围内路径;rw/2≤dm≤rw;机器人r行走的速度为vs,ts*vs≤rd/dv,1≤dv≤10;ts是处理与记录一个三维地图m3的坐标点数据的时长,rd是二维地图m2中的坐标点到4邻域中的坐标点所对应的实际距离;4邻域是指位于点的上边、下边、左边、右边4个相邻点所围的区域。
[0275]
例1、所述的机器人3进行遍及范围n的行走是指机器人3进行kn条边界路径le
nk
的行走,或者还包括进行mn条范围内路径lf
nm
的行走,机器人3行走的是速度vs=0.05m/s;每条边界路径le
nk
均是机器人r靠近范围n的边界k的行走路径,每条边界路径le
nk
到边界k的距离dk≤dk,并且每条边界路径的终点是下一条边界路径的起点,最后一条边界路径的终点是第一条边界路径的起点,k=1,2,...,kn,kn≥2,k是范围n边界的编号,kn是范围n边界的数量;rw/2=250mm≤dk=500mm≤sr*rw=500mm,sr=1.00;rw是机器人3的宽度=500mm;n=2时,k=1,2,...,9,k2=9;le2k是图1中(2)所示的9条带箭头的虚线,箭头所指方向为机器人3的行走方向;如果机器人3行走完kn条边界路径le
nk
后,条件a不成立,则机器人3还须进行mm条范围内路径lf
nm
的行走,使条件a成立,每条路径lf
nm
的起点与终点均在路径le
nk
上,m=1,2,...,mn,mn≥1,m是路径lf
nm
的编号,mn是路径lf
nm
的数量;rw/2=250mm≤dm=250mm≤rw;n=2时,机器人3行走完9条边界路径le2k后,条件a不成立,机器人3还须进行m2=3条范围内路径lf
2m
的行走,使条件a成立;lf
21
、lf
22
、lf
23
分别对应图1中(12)从下到上3条带箭头的点划线,箭头所指方向为机器人3的行走方向;条件a是满足dl
2kj
≤dm,ds2={dl
2kj
|满足条件p的距离};满足条件p的距离是同时满足如下两个条件的路径l
2k
与路径l
2j
之间的最大距离:
①
l
2k
与l
2j
不相交;
②
l
2k
与l
2j
之间没有其它路径;满足条件p的距离dl
2kj
共有7个,分别是le21与lf
21
的距离1个,lf
21
到其上方l
2j
的距离3个,lf
22
到lf
23
的距离1个,lf
23
到其上方l
2j
的距离2个;rw/2=250mm≤dm=250mm≤rw=500mm;机器人3行走的速度为vs=50mm/1000ms,ts*vs=200ms*50mm/1000ms=10mm≤rd/dv=50mm/10=10mm,dy=10;ts=200ms,rd是二维地图m2中的坐标点到4邻域中的坐标点所对应的实际距离为50mm。
[0276]
所述的每个机器人r均由机器人本体r、处理器cr、红外激光器r、导航系统r、行走系统r、无线网络设备wer、电源系统r、供电接口r组成,r=1,2,...,r;处理器cr是满足所述的机器人r运行和使用以及满足图像处理与其它处理的处理器,处理器cr内安装有处理软件;处理器cr分别与红外激光器r、导航系统r、行走系统r、无线网络设备wer相连;电源系统r是向机器人提供各种电源的系统;电源系统r分别与处理器cr、红外激光器r、导航系统r、行走系统r、无线网络设备wer、供电接口r相连;当供电接口r通过机器人充电桩接通外界电源时,供电接口r对电源系统r内的蓄电池充电;机器人本体r内安装有处理器cr、红外激光器r、导航系统r、行走系统r、无线网络设备wer、电源系统r、供电接口r。
[0277]
例k、k=1,2,3:参见图2;所述的每个机器人r均由机器人本体r、处理器cr、红外激光器r、导航系统r、行走系统r、无线网络设备wer、电源系统r、供电接口r组成,r=1,2,...,5;处理器cr是满足所述的机器人r运行和使用以及满足图像处理与其它处理的处理器,处理器cr内安装有处理软件;处理器cr分别与红外激光器r、导航系统r、行走系统r、无线网络设备wer相连;电源系统r分别与处理器cr、红外激光器r、导航系统r、行走系统r、无线网络设备wer、供电接口r相连;当供电接口r通过机器人充电桩接通外界电源时,供电接口r对电源系统r内的24v蓄电池充电;机器人本体r内安装有处理器cr、红外激光器r、导航系统r、行走系统r、无线网络设备wer、电源系统r、供电接口r。
[0278]
所述的每个检测点n均由处理器dn、采集设备n、无线网络设备wdn组成,n=1,2,...,n;处理器dn分别与采集设备n、无线网络设备wdn相连;处理器dn是满足图像处理和其它处理的处理器,处理器dn内安装有处理软件;每个采集设备n采集图像的区域n一一对应机器人规划路径的范围n;区域1,区域2,...,区域n覆盖所述的机器人规划路径全部范围正上方的全部区域,并且相邻的两个区域在图像上相互重叠,重叠的范围至少包含机器人整个外形向地面垂直投影在m2中的范围所对应的在这两个相邻区域中相重叠的范围。
[0279]
例k、k=1,2,3:参见图3;所述的每个检测点n均由处理器dn、采集设备n、无线网络设备wdn组成,n=1,2,...,6;处理器dn分别与采集设备n、无线网络设备wdn相连;处理器dn是满足图像处理和其它处理的处理器,处理器dn内安装有处理软件;每个区域n一一对应范围n;区域1,区域2,...,区域6覆盖所述的机器人规划路径全部范围正上方的全部区域,并且相邻的两个区域在图像上相互重叠,重叠的范围至少包含机器人整个外形500mm(w)*350mm(l)向地面垂直投影在m2中的范围所对应的在这两个相邻区域中相重叠的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1