一种基于重建前检测的实孔径雷达实时角超分辨方法
1.本发明涉及雷达成像领域,涉及实孔径雷达实时超分辨成像。
背景技术:
2.实孔径雷达(real aperture radar,rar)技术是一种有效的遥感技术手段,它通过在任意成像几何下的波束扫描,在地形测绘、灾害监测等领域应用广泛。然而,实孔径雷达的角分辨率却受到天线孔径大小的制约。为了满足不同应用的需求,提供充分的目标信息,角分辨率提升技术亟待研究。在扫描模式下,实孔径雷达方位向的回波可以近似建模为天线方向图与目标散射的卷积。因此,改善实孔径雷达角分辨率可转化为一个病态的求逆问题。
3.文献“spice:a sparse covariance-based estimation method for array processing,ieee trans.signal process.,vol.59,no.2,pp.629
–
638,feb.2011”提出了一种稀疏迭代协方差的超分辨估计方法,该方法通过引入稀疏惩罚进一步提高了稀疏目标的分辨率,并且不依赖与用户参数的选取,但是该方法的运算复杂度较高。为了降低该算法运算复杂度,文献“wideband sparse reconstruction for scanning radar,ieee transactions on geoscience and remote sensing,vol.56,no.10,pp.6055
–
6068,2018”提出一种宽带稀疏目标重建方法,该方法通过将宽带方位数据分割成窄带数据,极大的提升了算法的运算效率。但是,该方法仍采用传统“批数据获取后统一处理”的方式实现,这种数据批处理模式的内存占用率和计算复杂度极高,这使得实孔径雷达的实时监测、在线成像受到极大限制。
技术实现要素:
4.为解决现有技术存在的上述问题,本发明提出了一种基于重建前检测的实孔径雷达实时角超分辨方法。
5.本发明的具体技术方案为:一种基于重建前检测的实孔径雷达实时角超分辨方法,包括如下步骤:
6.步骤一:建立实孔径雷达回波模型
7.对于一个实孔径扫描雷达系统,方位分辨率受限于孔径大小,即θ
β
=0.886λ/d,其中,λ表示波长,d表示孔径尺寸。
8.基于rar的方位扫描模式,其回波矩阵可以表示为:
9.y=hs+e
ꢀꢀꢀꢀꢀꢀꢀ
(1)
10.其中,表示回波数据,n和m分别表示方位向和距离向采样点数;表示目标散射系数,k表示方位向目标场景采样点数;为加性噪声。
11.对于第m个距离单元,回波矢量可以表示为:
12.ym=hsm+emꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
13.其中,ym、sm和em分别表示矩阵y、s和e的第m个列向量,
14.导向矩阵h通过天线方向图构造为:
[0015][0016]
其中,矢量hk为雷达波束天线方向图,波束主瓣点数为l,an表示矩阵h的行矢量,则根据上述关系,有n=k+l-1;
[0017]
步骤二:数据自适应的重建前检测处理
[0018]
基于回波模型(1),第n个方位向的回波脉冲表示为:
[0019]yn
=tn+enꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0020]
其中,yn、tn和tn和en分别表示距离向目标矢量和加性白噪声,因此有效回波检测可以转化为假设检验问题:
[0021][0022]
其中,y
mn
、e
mn
和t
mn
分别表示向量yn、tn和en的第m个距离单元数据,h0表示不存在目标,h1表示存在目标。
[0023]
为了检测不同距离单元的目标,采用平均单元恒虚警检测(ca-cfar)方法对有效距离进行检测,可得有效回波采样为:
[0024]dn
⊙yn
=dn⊙
tn+dn⊙en
ꢀꢀꢀꢀꢀꢀꢀ
(6)
[0025]
其中,dn表示距离向采样矢量,有dn=(d1,...,dm),d1,...,dm有0和1组成,用以表示该距离单元回波数据的有效性,其中,0表示无效,1表示有效。
[0026]
在回波检测后,重采样的回波矩阵可以表示为:
[0027]d⊙
y=d
⊙
hs+d
⊙eꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0028]
其中,d=(d1,
…
,dn,
…
,dn)
t
=(d
′1,
…
,d
′m,
…
,d
′m),其中,d1,
…
,dn,
…
,dn为采样矩阵d的行向量,d
′1,
…
,d
′m,
…
,d
′m为采样矩阵d的列向量,采样矩阵d由1和0构成,表征该位置是否为有效回波数据,
⊙
表示矩阵点乘运算;
[0029]
检测后的第m个距离单元的回波矢量可以表示为:
[0030]gm
ym=gmhsm+g
mem
ꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0031]
其中,检测后的回波数据可以记为gmym=(y
m1
,
…ymg
,
…
,y
mg
)
t
,g表示有效数据方位维数,第m个距离单元的方位采样矩阵可通过方位采样矢量d
′m得出。
[0032]
步骤三:回波的数据自适应更新
[0033]
根据有效采样模型(8),由第k个方位向的目标网格反射的回波数据可以表示为:
[0034][0035]
其中,y
gm
=gmym表示重采样后的回波数据,即有效回波数据,ω表示有效回波数据
点的集合,hi表示有效采样测量矩阵中第i个有效目标单元对应的列向量,ri表示第i个有效目标单元处的目标幅度,表示第i个有效目标单元处的目标相位,g=1,
…
,g,表示有效回波单元的方位索引序号。
[0036]
构造以下代价函数:
[0037][0038]
其中,表示第m个距离单元上第k个目标单元是散射系数,rk表示第k个目标单元处的目标幅度,表示第k个目标单元处的目标相位,表示目标加权系数,q表示正则化参数,表示目标散射系数加权矩阵ws的对角线上的第k个元素,c0表示常数。
[0039]
通过最小化代价函数,各网格的目标散射估计可以表示为:
[0040][0041]
其中,估计的幅度和相位可以直接写为:
[0042][0043]
其中,表示有效采样导向矩阵gmh中第k个目标单元导向矢量的共轭转置,l为第l个目标网格,各中间参数表示为:
[0044][0045]
其中,h
gk
表示有效采样导向矩阵gmh中第k个目标单元导向矢量,||
·
||2表示向量的l2范数运算,|
·
|表示取绝对值运算,有效采样导向矩阵可以重写为:
[0046][0047]
其中,ck=h
gk
表示有效采样导向矩阵中第k个目标单元导向矢量,gg表示有效采样测量矩阵中第g个方位有效回波对应的导向矢量。
[0048]
为了快速更新公式(11)的中间变量,对于每一个回波采样y
mg
,矩阵的迭代更新可以表示为:
[0049][0050]
其中,(
·
)
″
和(
·
)
′
分别表示更新结果和当前结果,当前变量可初始化为0,q
′
初始化为0,其表示迭代更新过程中,当前采样点处的回波功率,h
*
表示对测量矩阵h的共轭转置运算,表示对第m个距离单元回波数据采样矩阵gm的共轭转置运算,π表示递归更新非均匀采样测量矩阵时的中间变量。
[0051]
公式(13)中参数可简化为:
[0052][0053]
其中,ηm=||y
mg-hs
′m||2表示y
mg-hs
′m的功率,π
′
kk
表示矩阵π
′
的第k个对角元,vk表示矢量v
′
的第k个元素,v
′
可以表示为:
[0054]v′
=u
′‑
π
′s′mꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0055]
其中,u
′
表示式(15)中迭代过程中当前的回波信号,可以初始化为0,s
′m表示迭代中当前的第m个距离单元的目标散射系数。采用式(11)、(12)、(15)、(16)和(17),即可实现第k个目标单元散射系数的更新。在获得第k个目标单元散射系数后,可利用第k个目标单元,可对第k+1目标单元的散射系数进行更新。获得第k个目标单元结果后,式(16)中的噪声功率ηm重新记为第k个目标单元的噪声功率第k+1个目标单元的噪声功率可以由式(18)表示。获得第k个目标单元结果后,式(17)中的信号残留向量v
′
重新记为第k个目标单元的信号残留向量v
′k,第k+1个目标单元的信号残留向量v
′
k+1
可以由式(18)表示。即,变量和v
′
k+1
可通过下式更新:
[0056][0057]
其中,表示第m距离单元回波迭代更新中矩阵π的第k个对角线上元素,表示第m距离单元回波迭代更新中第k个目标单元的当前估计结果与之前结果的差值,s
′
mk
表示当前估计结果,表示之前结果,可以初始化为0。[π]k表示矩阵π的第k列。在单个回波采样y
mg
时,重复地进行式(11)、(12)、(16)、(17)、(18),直至达到收敛,即可实现对目标散射系数的循环最小化更新。通过(11)-(18)式,各网格的估计结果可以在极少的内存占用条件下通过迭代更新得到。
[0058]
进一步的,还包括如下步骤:
[0059]
步骤四:目标数据自适应更新
[0060]
对于不同网格的目标收敛速度不同,为了避免冗余的迭代次数,引入一个索引集合θ=(1,2,
…
,l),该集合表示当前没有终止迭代的各目标网格的迭代次数,对于第k个目标网格,在相邻迭代次数间的功率差可以表示为:
[0061][0062]
当该功率差小于一个误差门限δδ时,该目标网格将从索引集合中剔除
[0063]
θ
κ+1
=θ
κ-θ
′
κ
ꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0064]
其中,θ
′
κ
表示在第κ次迭代时满足迭代终止条件的目标网格的索引集合,θ
κ
表示在第κ次迭代时未收敛的索引集合,当第κ+1次迭代时索引集合θ
κ+1
成为空集时,迭代终止,在索引集合更新过程中,大量冗余迭代被及时剔除。
[0065]
进一步的,还包括如下步骤:
[0066]
步骤五:更新框架的稳定性提升
[0067]
对于实孔径雷达信号模型,其导向矩阵为一低秩矩阵,一方面,(12)式中β
gk
的结果可能很小,这将导致求逆处理中噪声放大的问题。为此,引入正则化惩罚项以约束β
gk
,幅度可改写为:
[0068][0069]
其中,δβ为引入的正则化参数。
[0070]
另一方面,在迭代处理过程中,回波u
′
的功率可能小于π
*s′m,即
[0071][0072]
这将导致运算v
′
=u
′‑
π
*s′m中的元素出现负数,进而引起式(18)中迭代运算的结果非常大。为此,在式(17)后,引入一个阈值函数thres以增强在线处理框架的稳定性,即,
[0073][0074]
基于以上阈值函数,噪声放大问题可以被有效改善。
[0075]
本发明的有益效果:本发明的方法首先在距离向通过有效数据检测,减少距离向维度从而降低计算复杂度;然后在方位向利用一种回波的数据自适应在线处理结构,降低角超分辨处理时的内存占用量;最后通过目标的数据自适应更新方法,减少算法的迭代次数,进一步提升算法运算效率,此外又引入正则化参数和阈值函数提升算法稳健性,最终实现实孔径雷达实时角超分辨成像。与现有成像方法相比,本发明的方法一方面能够有效降低由噪声数值引起的高计算复杂度问题;另一方面,在超分辨重建结果无较大损失的前提下,能降低成像处理的内存占用。
附图说明
[0076]
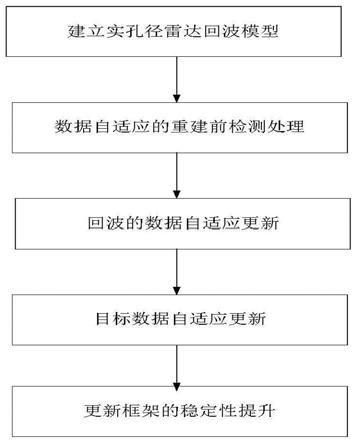
图1为本发明的基于重建前检测的实孔径雷达实时角超分辨方法流程图。
[0077]
图2为本发明实施例实波束回波图及距离检测后实波束成像结果图。
[0078]
图3为本发明实施例的成像结果对比图。
[0079]
图4为本发明实施例的内存占用对比图。
[0080]
图5为本发明实施例的运算时间对比结果图。
具体实施方式
[0081]
下面结合附图对本发明的实施例做进一步的说明。
[0082]
本发明主要采用仿真实验的方法进行验证,所有步骤、结论都在matlab上验证正确。
[0083]
本发明方法的具体流程如图1所述,包括如下步骤:
[0084]
步骤一:建立实孔径雷达回波模型
[0085]
基于实孔径雷达的方位扫描模式,其回波矩阵可以表示为:
[0086]
y=hs+e
ꢀꢀꢀꢀꢀꢀꢀꢀ
(24)
[0087]
其中,表示回波数据。n=240和m=226分别表示方位和距离采样点数,表示目标散射系数。k表示方位向目标场景采样点数,本发明实施例中,选择k=m=240,为加性白噪声。
[0088]
对于第m个距离单元,回波矢量可以表示为:
[0089]
ym=hsm+emꢀꢀꢀꢀꢀꢀꢀ
(25)
[0090]
其中,导向矩阵h可通过天线方向图构造为:
[0091][0092]
其中,矢量hk为雷达波束天线方向图,波束主瓣点数为l=40。an表示矩阵h的行矢量。实波束结果如图2(a)所示,其横轴表示方位维度(角度),纵轴表示距离(米)。
[0093]
步骤二:在线数据自适应检测后超分辨重建框架
[0094]
基于回波模型(1),第n个方位向的回波脉冲表示为
[0095]yn
=tn+enꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(27)
[0096]
其中,yn,tn和tn和en分别表示距离向目标矢量和加性白噪声。
[0097]
设虚警率为pf,采用平均单元恒虚警检测(ca-cfar)方法对有效距离进行检测,可得有效回波采样为:
[0098]dn
⊙yn
=dn⊙
tn+dn⊙en
ꢀꢀꢀꢀꢀꢀꢀꢀ
(28)
[0099]
其中,dn表示距离向采样矢量,有dn=(d1,...,dm)。在回波检测后,重采样的回波矩阵可以表示为
[0100]d⊙
y=d
⊙
hs+d
⊙eꢀꢀꢀꢀꢀꢀꢀꢀ
(29)
[0101]
其中,d=(d1,
…
,dn)
t
=(d
′1,
…
,d
′m),采样矩阵d由1和0构成,表征该位置是否为有效回波数据,
⊙
表示矩阵点乘运算。
[0102]
检测后的第m个距离单元的回波矢量可以表示为:
[0103]gm
ym=gmhsm+g
mem
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(30)
[0104]
其中,检测后的回波数据可以记为gmym=(y
m1
,
…
,y
mg
)
t
,g表示有效数据方位维数。仿真中虚警概率为pf=10-2
,距离检测后结果如图2(b)所示,其横轴表示方位维度(角度),纵轴表示距离(米)。
[0105]
步骤三:回波的数据自适应更新
[0106]
根据有效采样模型(30),由第k个方位向的目标网格反射的回波数据可以表示为
[0107][0108]
其中y
gm
=gmym表示重采样后的回波数据,即有效回波数据。ω表示有效回波数据点的集合。
[0109]
构造以下代价函数
[0110][0111]
通过最小化代价函数,各网格的目标散射估计可以表示为:
[0112][0113]
其中,幅度和相位可以直接写为:
[0114][0115]
其中,l为第l个目标网格,q=3为可调节正则化参数,各中间参数可以表示为:
[0116][0117]
其中,有效采样导向矩阵可以重写为:
[0118][0119]
为了快速更新公式(33)的中间变量,对于每一个回波采样y
mg
,矩阵的迭代更新可以表示为:
[0120][0121]
其中,(
·
)
″
和(
·
)
′
分别表示更新结果和当前结果,当前变量可初始化为0,公式(13)中参数可简化为:
[0122][0123]
其中,ηm=||y
mg-hs
′m||2表示y
mg-hs
′m的功率,π
′
kk
表示矩阵π
′
的第k个对角元,vk表示矢量v
′
的第k个元素,v
′
可以表示为v
′
=u
′‑
π
′s′m,变量和v
′
k+1
可通过下式更新
[0124][0125]
其中,[π]k表示矩阵π的第k列。通过(33)-(39)式,各网格的估计结果可以在极少的内存占用条件下通过迭代更新得到。与传统方法的内存占用对比结果如图4所示。
[0126]
步骤四:目标的数据自适应更新
[0127]
对于不同网格的目标收敛速度不同,为了避免冗余的迭代次数,引入一个索引集合θ=(1,2,
…
,l),该集合表示当前没有终止迭代的各目标网格。
[0128]
对于第k个目标网格,在相邻迭代次数间的功率差可以表示为:
[0129][0130]
当该功率差小于一个误差门限δδ=10-3
时,该目标网格将从索引集合中剔除:
[0131]
θ
κ+1
=θ
κ-θ
′
κ
ꢀꢀꢀꢀꢀꢀꢀꢀ
(41)
[0132]
其中,θ
′
κ
表示在第κ次迭代时满足迭代终止条件的目标网格的索引集合,θ
κ
表示在第κ次迭代时未收敛的索引集合,当第κ+1次迭代时索引集合θ
κ+1
成为空集时,迭代终止。
[0133]
在索引集合更新过程中,大量冗余迭代被及时剔除。与传统方法的运算时间对比结果如图5所示。
[0134]
步骤五:更新框架的稳定性提升
[0135]
对于实孔径雷达信号模型,其导向矩阵为一低秩矩阵。一方面,式(34)中β
gk
的结果可能很小,这将导致求逆处理中噪声放大的问题。为此,引入正则化惩罚项以约束β
gk
,幅度可改写为:
[0136][0137]
其中,δβ=0.1为引入的正则化参数。
[0138]
另一方面,在迭代处理过程中,回波u
′
的功率可能小于π
*s′m,即
[0139][0140]
这将导致运算v
′
=u
′‑
π
*s′m中的元素出现负数,进而引起式(39)中迭代运算的结果非常大,为此,引入一个阈值函数以增强在线处理框架的稳定性,即,
[0141][0142]
基于以上阈值函数,噪声放大问题可以被有效改善。
[0143]
本发明采用多个不同排布的点目标作为仿真场景中各散射点,雷达平台的主要系统仿真参数如表1所示。
[0144]
表1
[0145][0146]
首先,采用传统方法的成像结果如图3(c)所示,可以看到,采用传统成像方法所得的仿真结果虚假目标较多,易造成目标识别错误,难以正确分辨原始目标。而采用本发明方法得到的成像结果如图3(d)所示。对比图3(c)可知,本发明方法的成像结果对噪声有了更好的抑制效果,并且由图4(内存占用结果对比)和图5(运算时间结果对比)可知,本发明的方法相比传统方法具备更快的运算速度及更小的内存消耗。
[0147]
综上所述,两成像结果图的对比验证了本发明方法相较于传统成像方法,有效地降低了计算复杂度和内存消耗。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1