机器人建图方法、装置及相关设备与流程
本申请涉及物联网,尤其涉及一种机器人建图方法、装置及相关设备。
背景技术:
1、随着计算机技术和机器人产业的发展,移动机器人成为了机器人领域的一个研究热点。移动机器人的地图创建作为其自主定位、避障、路线规划的重要依据,是移动机器人工作的关键流程。
2、相关技术多通过激光雷达采集工作区域的点云数据的方式,来构建工作区域的地图,应用中发现,在工作区域存在镜面时,激光雷达所发射的激光线束会受到镜面的干扰,这使得激光雷达所采集的点云数据存在较大误差,进而导致所构建的地图的准确度低。
技术实现思路
1、本申请实施例提供一种机器人建图方法、装置及相关设备,以解决在工作区域存在镜面时,基于相关技术所构建的地图的准确度低的问题。
2、为解决上述问题,本申请是这样实现的:
3、第一方面,本申请实施例提供了一种机器人建图方法,所述方法包括:
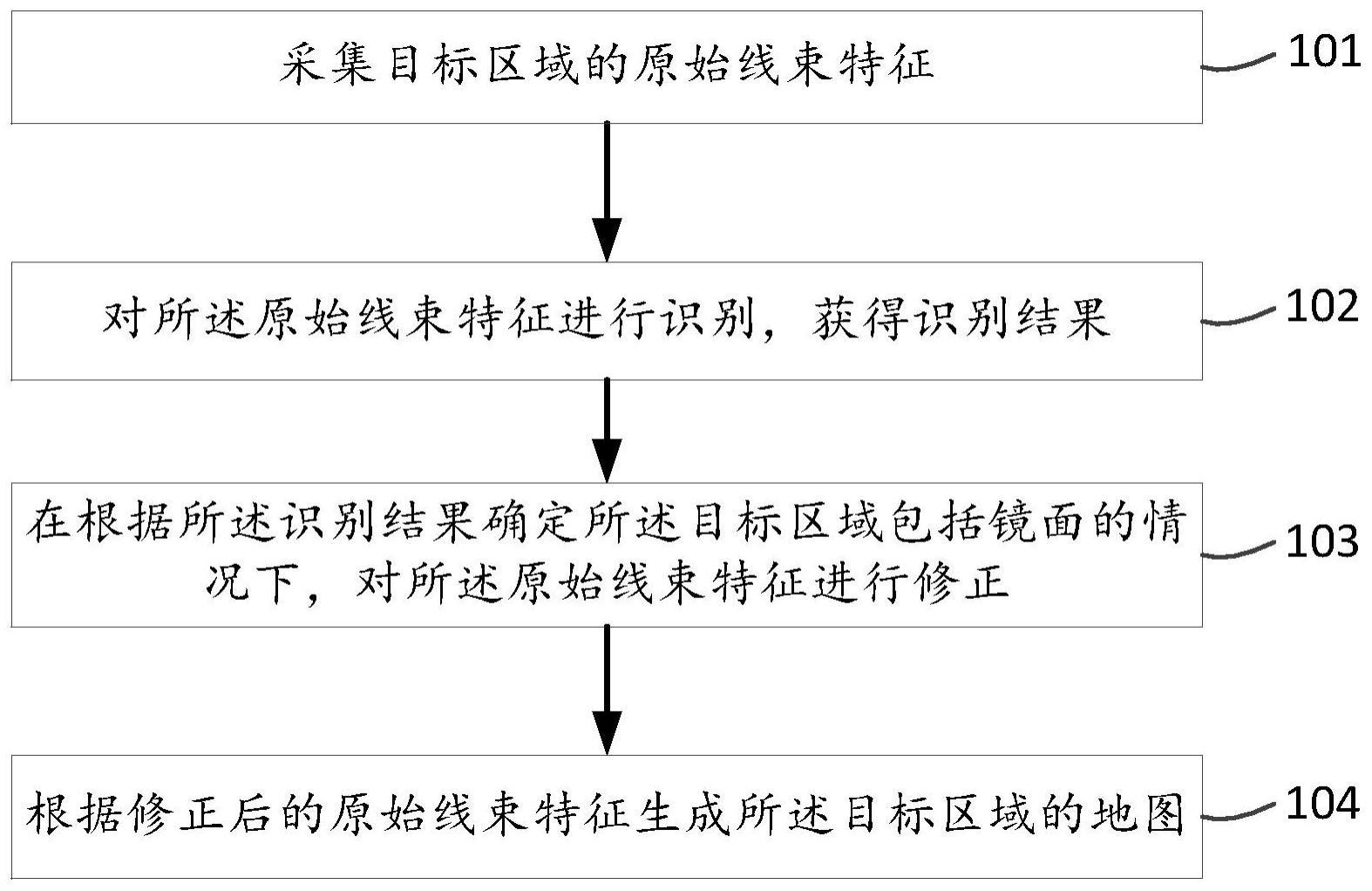
4、采集目标区域的原始线束特征,所述目标区域为所述机器人的移动区域;
5、对所述原始线束特征进行识别,获得识别结果;
6、在根据所述识别结果确定所述目标区域包括镜面的情况下,对所述原始线束特征进行修正;
7、根据修正后的原始线束特征生成所述目标区域的地图。
8、在一些实施方式中,所述对所述原始线束特征进行修正,包括:
9、获取所述原始线束特征中的异常线束特征和常规线束特征,所述异常线束特征的特征值大于所述常规线束特征的特征值,且所述异常线束特征的特征值与所述常规线束特征的特征值之差大于预设的阈值;
10、对所述异常线束特征进行修正;
11、所述根据修正后的原始线束特征生成所述目标区域的地图,包括:
12、基于所述常规线束特征和修正后的异常线束特征生成所述目标区域的地图。
13、在一些实施方式中,对所述异常线束特征进行修正,包括:
14、获取所述异常线束特征的边界信息和夹角信息;
15、基于余弦定理对所述边界信息和夹角信息进行处理,获得调整参数;
16、基于所述调整参数对所述异常线束特征进行修正。
17、在一些实施方式中,在采集目标区域的原始线束特征之前,所述方法还包括:
18、采集所述目标区域的光谱图像,所述光谱图像包括多个像素块、以及每一像素块对应的光谱信息;
19、基于多个光谱信息对所述目标区域进行分割,获得多个子区域;
20、所述采集目标区域的原始线束特征,包括:
21、根据所述多个子区域,采集目标区域的原始线束特征。
22、在一些实施方式中,所述根据所述多个子区域,采集目标区域的原始线束特征,包括:
23、针对每一子区域,采集所述子区域的原始子线束特征;
24、所述对所述原始线束特征进行识别,获得识别结果,包括:
25、针对每一子区域,基于识别模型对所述原始子线束特征进行识别,获得子识别结果;
26、所述在根据所述识别结果确定所述目标区域包括镜面的情况下,对所述原始线束特征进行修正,包括:
27、针对每一子区域,在根据所述子识别结果确定所述子区域包括镜面的情况下,对所述原始子线束特征进行修正;
28、所述根据修正后的原始线束特征生成所述目标区域的地图,包括:
29、基于修正后的多个原始子线束特征,生成所述目标区域的地图。
30、在一些实施方式中,在采集目标区域的原始线束特征之前,所述方法还包括:
31、获取初始模型;
32、基于训练样本对所述初始模型进行训练,获得所述识别模型,所述训练样本包括第一线束样本和第二线束样本,所述第一线束样本包括有镜面区域的线束特征,所述第二线束样本不包括镜面区域的线束特征。
33、在一些实施方式中,所述原始线束特征包括激光点云数据、超声波数据和光谱数据。
34、第二方面,本申请实施例还提供一种机器人建图装置,包括:
35、采集模块,用于采集目标区域的原始线束特征,所述目标区域为所述机器人的移动区域;
36、识别模块,用于对所述原始线束特征进行识别,获得识别结果;
37、修正模块,用于在根据所述识别结果确定所述目标区域包括镜面的情况下,对所述原始线束特征进行修正;
38、建图模块,用于根据修正后的原始线束特征生成所述目标区域的地图。
39、第三方面,本申请实施例还提供一种通信设备,包括:收发机、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序;其特征在于,所述处理器,用于读取存储器中的程序实现如前述第一方面所述方法中的步骤。
40、第四方面,本申请实施例还提供一种可读存储介质,用于存储程序,所述程序被处理器执行时实现如前述第一方面所述方法中的步骤。
41、在本申请实施例中,通过对原始线束特征进行识别,并在识别结果指示目标区域包括镜面的情况下,对原始线束特征进行修正的方式,能降低镜面对原始线束特征产生的干扰问题,使基于修正后的原始线束特征生成的地图具备较高的准确度。
技术特征:
1.一种机器人建图方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述对所述原始线束特征进行修正,包括:
3.根据权利要求2所述的方法,其特征在于,对所述异常线束特征进行修正,包括:
4.根据权利要求1所述的方法,其特征在于,在采集目标区域的原始线束特征之前,所述方法还包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述多个子区域,采集目标区域的原始线束特征,包括:
6.根据权利要求5所述的方法,其特征在于,在采集目标区域的原始线束特征之前,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,所述原始线束特征包括激光点云数据、超声波数据和光谱数据。
8.一种机器人建图装置,其特征在于,包括:
9.一种通信设备,包括:收发机、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序;其特征在于,所述处理器,用于读取存储器中的程序实现如权利要求1至7中任一项所述的机器人建图方法中的步骤。
10.一种可读存储介质,用于存储程序,其特征在于,所述程序被处理器执行时实现如权利要求1至7中任一项所述的机器人建图方法中的步骤。
技术总结
本申请提供一种机器人建图方法、装置及相关设备,所述方法包括:采集目标区域的原始线束特征,所述目标区域为所述机器人的移动区域;对所述原始线束特征进行识别,获得识别结果;在根据所述识别结果确定所述目标区域包括镜面的情况下,对所述原始线束特征进行修正;根据修正后的原始线束特征生成所述目标区域的地图。通过对原始线束特征进行识别,并在识别结果指示目标区域包括镜面的情况下,对原始线束特征进行修正的方式,能降低镜面对原始线束特征产生的干扰问题,使基于修正后的原始线束特征生成的地图具备较高的准确度。
技术研发人员:宋文静,王曦泽,李小涛
受保护的技术使用者:中国移动通信有限公司研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!