一种钢轨轨底点蚀缺陷的精准定位检测方法
1.本发明涉及无损检测技术领域,具体为一种钢轨轨底点蚀缺陷的精准定位检测方法。
背景技术:
2.轨底是铁路基础设施最重要的部分之一,恶劣的工作环境容易使轨底产生腐蚀。点蚀是一种局部的腐蚀缺陷,一般表现为尺寸较小的小孔(mm级),它比均匀腐蚀更危险,更难被检测到,且分布范围广,由腐蚀而提前更换钢轨的成本很高。因此需要及时进行轨底无损检测,确保铁路运行安全。现有的探伤车对轨底外侧区域检测存在检测盲区,而且传统的导波检测主要采用低频导波实现长距离大范围的检测,但只对大缺陷敏感,无法识别点蚀缺陷。而激光超声技术的高频脉冲激励可在短时间内实现多点激励,且可在钢轨中激励出宽频带超声导波,对小尺寸缺陷敏感,可根据被测缺陷尺寸需求,选择合适的超声中心频率进行检测。此外,pzt柔性薄膜传感器作为传感元件,可与轨底表面长时间贴合,具有高频响应频带,可检测小缺陷超声信号。另外,成像方法是目前无损检测结果最直接的体现方法,因此,有必要通过布设激光-pzt阵列布局检测方法,结合概率成像算法,实现轨底一定区域内点蚀缺陷的高效、直观检测。
3.此外,由于轨底表面的复杂形貌及其粗糙度的影响,点蚀缺陷对应的激光超声导波信号存在较多干扰噪声,因此,亟需对激光超声导波信号采取有效的降噪处理。vmd在克服模态混合和增强滤波效果方面比其他降噪技术更有优势,能够确定各模式的中心频率和带宽。虽然vmd在一些信号处理案例中做出了显著的贡献,但在仍然存在典型的参数(k和α)选择问题,这些参数的设置不当是分解结果不准确的根本原因。因此,考虑到对轨底点蚀缺陷快速准确检测的严格要求,对vmd进行适当的优化参数精度也是非常有必要的。
技术实现要素:
4.本部分的目的在于概述本发明的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
5.因此,本发明的目的是提供一种钢轨轨底点蚀缺陷的精准定位检测方法,提高轨底点蚀缺陷的直观、精准定位检测,为钢轨轨底高效、高精度自动化检测提供参考。
6.为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
7.一种钢轨轨底点蚀缺陷的精准定位检测方法,其包括如下步骤:
8.s1、建立激光-pzt柔性传感阵列检测系统,检测不同位置的轨底点蚀缺陷以及相同检测区域的导波信号;
9.s2、对采集到的各导波信号进行参数优化的vmd降噪处理;
10.s3、利用概率成像方法对检测区域缺陷定位成像;
11.s4、结合奇异值分解特征提取法提取检测区域点蚀缺陷的精准位置参数,对点蚀缺陷的精确位置特征参数提取,以实现缺陷位置的精准识别。
12.作为本发明所述的一种钢轨轨底点蚀缺陷的精准定位检测方法的一种优选方案,其中,所述步骤s1中,建立激光-pzt柔性传感阵列检测系统,检测不同位置的轨底点蚀缺陷以及相同检测区域的导波信号的具体步骤如下:
13.s101、制备不同位置且直径为1mm的人工点蚀缺陷;
14.s102、基于轨底曲面的横向长度,结合激光脉冲激励可在短时间内实现多次激励,建立激光-pzt轨底阵列检测系统,采集各缺陷多路径的激光超声导波信号。
15.作为本发明所述的一种钢轨轨底点蚀缺陷的精准定位检测方法的一种优选方案,其中,所述步骤s2中,对采集到的各导波信号进行参数优化的vmd降噪处理的具体步骤如下:
16.s201、构建自适应函数,结合导波信号和粒子群寻优算法优化vmd的参数,得到最优vmd参数值;
17.s202、对采集到的各导波信号进行vmd分解,计算各imf分量与原信号的信噪比,得到最优imf分量。
18.作为本发明所述的一种钢轨轨底点蚀缺陷的精准定位检测方法的一种优选方案,其中,所述步骤s201中,构建自适应函数,结合导波信号和粒子群寻优算法优化vmd的参数,得到最优vmd参数值的具体步骤如下:
19.对采集到的导波信号进行时频分析,并构造结合能量因子和频率组合因子的自适应函数;
20.采用粒子群寻优算法结合自适应函数对每次分解过程中的vmd参数进行优化。
21.作为本发明所述的一种钢轨轨底点蚀缺陷的精准定位检测方法的一种优选方案,其中,所述步骤s202中,对采集到的各导波信号进行vmd分解,计算各imf分量与原信号的信噪比,得到最优imf分量的具体步骤如下:
22.基于寻优后得到的vmd参数,对采集到的所有导波信号进行vmd分解;
23.求解各imf分量的信噪比值,通过信噪比最大原则,选择对分解后的最优imf分量,实现信号的滤波降噪;其中,信噪比计算方式如下:
[0024][0025]
其中,a
signal
定义为imf分量中导波信号的最大幅值,a
noise
定义为固定局部噪声幅值的平均值。
[0026]
作为本发明所述的一种钢轨轨底点蚀缺陷的精准定位检测方法的一种优选方案,其中,所述自适应函数为:f(k,α)=ρ+b,其中,k为当前分解层数,ρ为能量因子,b为组合频率因子。
[0027]
作为本发明所述的一种钢轨轨底点蚀缺陷的精准定位检测方法的一种优选方案,其中,所述粒子群寻优算法构建步骤如下:
[0028]
设置初始的种群数量为30,迭代的总次数为200,k=[2-10]的范围及α=[100-3000]的范围;
[0029]
根据不同的粒子位置对信号进行vmd分解,计算上文所述的自适应值f(k,α);
[0030]
根据自适应值的大小,自动更新个体最优值和整体最优值;
[0031]
根据下式更新粒子的位置和速度;
[0032][0033]
其中,ω为惯性权重因子,c1和c2为加速度因子,r1和r2为[0,1]之间的随机数,vi(t)为当前粒子速度,xi(t)为当前粒子位置,p
best
(t)为个体极值,pg(t)为种群全局极值;
[0034]
直到达到设置的迭代次数200次,计算终止,此时输出最优粒子位置[k,α]以及最优自适应值。
[0035]
作为本发明所述的一种钢轨轨底点蚀缺陷的精准定位检测方法的一种优选方案,其中,所述步骤s3中,利用概率成像方法对检测区域缺陷定位成像的具体步骤如下:
[0036]
将轨底检测区域划分成多个像素点的集合,随即通过逐点识别并对检测区域成像;
[0037]
通过计算激光-pzt阵列检测区域中各路径的损伤因子,每个路径对应一个椭圆形影响区域,将各区域分别成像并融合得到概率成像图;
[0038]
同归对比不同位置处的概率值大小,判断缺陷位置可能性的大小,实现缺陷的初步成像定位检查,其中,概率值越大,则表示缺陷位置越强。
[0039]
作为本发明所述的一种钢轨轨底点蚀缺陷的精准定位检测方法的一种优选方案,其中,所述步骤s3中,概率成像方法具体为:
[0040]
每个监测子区域内每个像素点存在损伤的概率为:
[0041][0042]
其中,
[0043][0044]
式中,r(x,y)是像素点(x,y)距离激光激励点(xi,yi)和传感器接收点(xj,yj)的距离远近,n
p
是激励-传感路径数量,第k个路径的损伤因子是λ
xy
,代表基准信号与检测信号与间的差异程度,β为尺寸参数;
[0045]
损伤因子λ
xy
可表示为:
[0046][0047]
式中,n为每次信号采样点数,xi和yi为用于计算的2个信号。
[0048]
作为本发明所述的一种钢轨轨底点蚀缺陷的精准定位检测方法的一种优选方案,其中,所述步骤s4,结合奇异值分解特征提取法提取检测区域点蚀缺陷的精准位置参数,对点蚀缺陷的精确位置特征参数提取的具体步骤如下:
[0049]
对轨底损伤成像矩阵进行奇异值分解,得到它的奇异值,任意矩阵a∈rm
×
n,秩为r(r≤min(m,n)),则有正交矩阵u∈rm×n,v∈rm×n使损伤成像矩阵满足以下表达式:
[0050][0051]
其中,u=(u1,u2,
…
,um)∈rm×m,v=(v1,v2,
…
,vn)∈rm×m,δ=diag(σ1,σ2,
…
,σr,0,0,
…
,0)且有σ1≥σ2≥
…
σr>σ
r+1
=σ
r+2
=
…
=σ
p
=0(p=min(m,n)),v
t
表示矩阵v的转置。σi为a的奇异值,ui,vi分别为σi对应的左、右奇异向量;
[0052]
对非零奇异值进行降序排列,并组成一维列向量;
[0053]
取前k个有效奇异值,得到轨底缺陷位置成像的奇异值特征向量个数。
[0054]
与现有技术相比,本发明具有的有益效果是:为此,本发明探索性的研究采用激光-pzt柔性传感阵列检测系统,检测不同位置的轨底点蚀缺陷、对采集到的多路导波信号进行基于参数优化的变分模态分解算法(vmd)降噪处理、利用概率成像方法实现检测区域缺陷的定位成像,实现了轨底表面缺陷的初步定位检测并结合奇异值分解(svd)特征提取法提取检测区域点蚀缺陷的精准位置参数,实现了点蚀缺陷的精确位置特征参数提取,提高轨底点蚀缺陷的直观、精准定位检测,为钢轨轨底高效、高准确性的实时在线监测与评估的应用型设备提供参考。
附图说明
[0055]
为了更清楚地说明本发明实施方式的技术方案,下面将结合附图和详细实施方式对本发明进行详细说明,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
[0056]
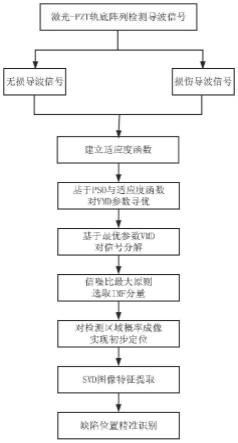
图1为本发明一种钢轨轨底点蚀缺陷的精准定位检测方法的流程图;
[0057]
图2为本发明一种钢轨轨底点蚀缺陷的精准定位检测方法的激光-pzt阵列轨底检测实验系统及实验方案图;
[0058]
图3为本发明一种钢轨轨底点蚀缺陷的精准定位检测方法的激光-pzt阵列检测的轨底导波信号的时域与频域图;
[0059]
图4为本发明一种钢轨轨底点蚀缺陷的精准定位检测方法的基于pso与适应度函数的vmd参数智能优化算法流程图;
[0060]
图5为本发明一种钢轨轨底点蚀缺陷的精准定位检测方法的vmd参数最优值随迭代次数的变化结果显示图;
[0061]
图6为本发明一种钢轨轨底点蚀缺陷的精准定位检测方法提出的最优参数vmd分解后的各分量信号示意图;
[0062]
图7为本发明一种钢轨轨底点蚀缺陷的精准定位检测方法的缺陷imf1概率成像结果和svd处理后缺陷成像结果对比图;
[0063]
图8为本发明一种钢轨轨底点蚀缺陷的精准定位检测方法的不同位置点蚀缺陷svd处理后的准确诊断成像结果示意图。
具体实施方式
[0064]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。
[0065]
其次,本发明结合示意图进行详细描述,在详述本发明实施方式时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本发明保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
[0066]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地详细描述。
[0067]
本发明提供一种钢轨轨底点蚀缺陷的精准定位检测方法,提高轨底点蚀缺陷的直观、精准定位检测,为钢轨轨底高效、高精度自动化检测提供参考。
[0068]
请参阅图1-图8,本发明一种钢轨轨底点蚀缺陷的精准定位检测方法,步骤如下:
[0069]
s1、建立激光-pzt柔性传感阵列检测系统,检测不同位置的轨底点蚀缺陷以及相同检测区域的导波信号,具体的,在本实施方式中,s101、制备不同位置且直径为1mm的人工点蚀缺陷、s102、基于轨底曲面的横向长度,结合激光脉冲激励可在短时间内实现多次激励,建立激光-pzt轨底阵列检测系统,采集各缺陷多路径的激光超声导波信号,本实施方式中,基于轨底曲面的横向长度限制以及高频导波衰减快的特点,结合激光脉冲激励可以在短时间内实现多次激励的优点,建立激光-pzt轨底阵列检测区域,如图2所示,区域大小为50mm*45mm,其中激光激励点有10个,5个传感设计在同一列上,用于采集各缺陷多路径的激光超声导波信号。制备了三个直径为1mm,深度1mm的人工点蚀缺陷为检测对象,位于检测区域的不同位置,坐标分别为1#(15,36)、2#(37,12)、和3#(33,30)。
[0070]
如图1系统中,激光器采用波长为1064nm、重复频率为10hz、脉宽为8ns的脉冲激光器。柔性传感器阵列包含了5个pzt传感器,通过环氧粘合剂贴附在轨底表面,再接入超声前置放大器对导波信号进行放大,最后由采样频率为100mhz的ni采集卡接收。系统通过单片机控制电路控制激光器的输出、振镜的运动和采集卡的采集。激励点为一列10个,光斑直径0.2mm,点与点之间距离为4.5mm,激光激励源始端e1与终端e2分别与传感器s1号和s5号的中心位置一致。
[0071]
s2、对采集到的各导波信号进行参数优化的vmd降噪处理,具体的,s201、构建自适应函数,结合导波信号和粒子群寻优算法优化vmd的参数,得到最优vmd参数值;s202、对采集到的各导波信号进行vmd分解,计算各imf分量与原信号的信噪比,得到最优imf分量。步骤s201中,构建自适应函数,结合导波信号和粒子群寻优算法优化vmd的参数,得到最优vmd参数值的具体步骤如下:对采集到的导波信号进行时频分析,并构造结合能量因子和频率组合因子的自适应函数采用粒子群寻优算法结合自适应函数对每次分解过程中的vmd参数进行优化。
[0072]
本实施方式中,对实验采集的信号进行频谱分析,如图3所示,信号中包含较多串扰和高频噪声,需要对其进行降噪处理。本研究基于vmd算法对信号进行降噪处理,为了自动寻优出最佳vmd参数,避免人为因素的干扰,在vmd分解过程中构造本文适用的适应度函数,即构造了结合能量因子和频率组合因子的自适应函数;采用粒子群算法结合自适应函数对每次分解中的vmd参数进行优化,得到最优参数k和α,vmd参数寻优流程图如图4所示,寻优结果如图5所示,当α=4930,k=3时为最佳参数值,步骤s202中,对采集到的各导波信
号进行vmd分解,计算各imf分量与原信号的信噪比,得到最优imf分量的具体步骤如下:基于寻优后得到的vmd参数,对采集到的所有导波信号进行vmd分解;求解各imf分量的信噪比值,通过信噪比最大原则,选择对分解后的最优imf分量,实现信号的滤波降噪;其中,信噪比计算方式如下:
[0073][0074]
其中,a
signal
定义为imf分量中导波信号的最大幅值,a
noise
定义为固定局部噪声幅值的平均值。
[0075]
其中,本研究提出的自适应函数构建算法如下:
[0076]
在vmd模型中,任何信号都可以被分解成具有不同带宽的一系列模态,有各自的中心频率。从能量角度来分析,分解后得到的各imf分量的能量之和与原信号能量近似。能量越接近说明分解的层数越多,重构信号可以得到更多的模态分量(imf分量的个数),使其恢复原始信号的能力增强,模态分量变得更加精确,对应k值越大,α越小。因此,能量因子ρ可作为适应度函数之一,即:
[0077]
ρ=|e
k-e
k-1
|/ek.其中,k为当前分解层数,ek为k层分解后各分量信号能量和,e
k-1
为前一次k-1层分解后各分量能量之和。
[0078]
然而,当k值越大,计算量会显著增加。k越大越容易产生重复信号分量,且计算量大,而小的α越容易丢失有用信息,使得imf分量的频带过窄。因此,还需要引入不同分量的频率因子定义作为适应度函数的另一部分,以避免参数极端。组合分量频率因子计算如下:
[0079][0080]
其中,a1、a2为为归一化因子,ω={ω1,ω2,...,ωi}表示不同imf分量的中心频率,fs为信号的采样率,δi表示分量信号中最大中心频率和最小中心频率的差值,βi表示最小相邻分量中心频率差值,b为组合频率因子。
[0081]
由上述可知,模式相关性和带宽状态对k和α的选取是互补的,起到相互制约的作用。因此,对于单个信号,两者的结合不仅能够消除不良分解和极端参数,而且体现了分解效果。此外,两种自适应函数的计算速度不同,为了能同时达到制约效果,得到最优k和α的参数值,需对他们加以权重。因此,最终可将适应度函数f(k,α)设计为:
[0082]
f(k,α)=ρ+b。
[0083]
粒子群寻优算法构建步骤如下:
[0084]
设置初始的种群数量为30,迭代的总次数为200,k=[2-10]的范围及α=[100-3000]的范围;
[0085]
根据不同的粒子位置对信号进行vmd分解,计算上文所述的自适应值f(k,α);
[0086]
根据自适应值的大小,自动更新个体最优值和整体最优值;
[0087]
根据下式更新粒子的位置和速度;
[0088][0089]
其中,ω为惯性权重因子,c1和c2为加速度因子,r1和r2为[0,1]之间的随机数,vi(t)为当前粒子速度,xi(t)为当前粒子位置,p
best
(t)为个体极值,pg(t)为种群全局极值;直到达到设置的迭代次数200次,计算终止,此时输出最优粒子位置[k,α]以及最优自适应值。计算结果如表1所示,由表1可以看出与最大信噪比值对应的imf分量为imf1,因此选用imf1为最佳分量作为后续概率成像的最终信号;
[0090]
表1-vmd算法分解信号所得各imf分量的信噪比值
[0091][0092]
s3、利用概率成像方法对检测区域缺陷定位成像,具体的,将轨底检测区域划分成多个像素点的集合,随即通过逐点识别并对检测区域成像;通过计算激光-pzt阵列检测区域中各路径的损伤因子,每个路径对应一个椭圆形影响区域,将各区域分别成像并融合得到概率成像图,同归对比不同位置处的概率值大小,判断缺陷位置可能性的大小,实现缺陷的初步成像定位检查,其中,概率值越大,则表示缺陷位置越强,如图7(a)所示,在成像区域中,颜色越深的像素坐标表示存在缺陷的可能性越大,但是,各路径的交汇处,即正中心位置必然存在明显色带的交叉区域,为假阳性结果,假阳性结果显示出比实际损伤区域更高的概率,这将影响损伤检测与识别。虽然在图7(a)右小角可发现缺陷的分布,但是在图中可以仍观察到一个与轨底实际损伤位置相近的热椭圆区域,用虚线框突出显示,因此仅靠现有成像结果无法精准确定缺陷位置信息。其中,概率成像方法具体为:
[0093]
每个监测子区域内每个像素点存在损伤的概率为:
[0094][0095]
其中,
[0096][0097]
式中,r(x,y)是像素点(x,y)距离激光激励点(xi,yi)和传感器接收点(xj,yj)的距离远近,n
p
是激励-传感路径数量,第k个路径的损伤因子是λ
xy
,代表基准信号与检测信号与间的差异程度,β为尺寸参数;
[0098]
损伤因子λ
xy
可表示为:
[0099][0100]
式中,n为每次信号采样点数,xi和yi为用于计算的2个信号。
[0101]
s4、结合奇异值分解特征提取法提取检测区域点蚀缺陷的精准位置参数,对点蚀缺陷的精确位置特征参数提取,以实现缺陷位置的精准识别,2#缺陷svd特征提取后的结果如图7(b)所示,消除了检测区域中心位置出现的假阳性区域影响,缺陷位置处色带最深。具体地,图像中的2#缺陷中心位置与真实中心位置之间的误差为0.3mm。其他位置点蚀缺陷的最终成像定位结果如图8所示。
[0102]
其中,釆用svd来提取轨底缺陷位置成像的奇异值特征有如下几个步骤:
[0103]
对轨底损伤成像矩阵进行奇异值分解,得到它的奇异值。任意矩阵a∈rm
×
n,秩为r(r≤min(m,n)),则有正交矩阵u∈rm×n,v∈rm×n使损伤成像矩阵满足以下表达式:
[0104][0105]
其中,u=(u1,u2,
…
,um)∈rm×m,v=(v1,v2,
…
,vn)∈rm×m,δ=diag(σ1,σ2,
…
,σr,0,0,
…
,0)且有σ1≥σ2≥
…
σr>σ
r+1
=σ
r+2
=
…
=σ
p
=0(p=min(m,n)),v
t
表示矩阵v的转置。σi为a的奇异值,ui,vi分别为σi对应的左、右奇异向量。
[0106]
对非零奇异值进行降序排列,并组成一维列向量,如:(σ'1,σ'2,
…
σ'r)
t
。
[0107]
取前k个有效奇异值,即可得到轨底缺陷位置成像的奇异值特征向量个数。
[0108]
虽然在上文中已经参考实施方式对本发明进行了描述,然而在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本发明所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1