一种单线MEMS激光雷达的测距方法及系统与流程
一种单线mems激光雷达的测距方法及系统
技术领域
1.本发明涉及测量仪器技术领域,具体涉及一种单线mems激光雷达的测距方法及系统。
背景技术:
2.mems(微机电系统)激光雷达相比于传统的机械式激光雷达有体积小,结构简单,易量产,成本低,可靠性高等优势,是激光雷达发展的一个重要趋势。
3.单线mems激光雷达为基于mems微振镜的2-d激光雷达,由于mems微振镜处于高速谐振状态,其振动频率可高达数千赫兹,因此其限制mems激光雷达的测距方式为单次回波测量方式。
4.基于单次回波测量方式的mems激光雷达在发射光斑截断,多机干扰,雨雾天气等可能产生干扰回波或多回波的条件下存在误检测的情况。
技术实现要素:
5.本发明的目的是针对现有单线mems激光雷达因干扰回波及多回波条件下的测量问题,提供一种单线mems激光雷达的测距方法及系统。
6.本发明的技术解决方案是提供一种单线mems激光雷达的测距方法,其特殊之处在于,包括以下步骤:
7.步骤1、控制微振镜按设定振幅a/2与设定频率f做简谐振动;其中a为激光雷达整体扫描角;
8.步骤2、根据激光雷达量程与微振镜参数,计算激光雷达扫描一帧所有n个预设扫描角度所需的扫描周期数n
t
以及n
t
个扫描周期组成的预设扫描角度序列表,并存储;其中扫描周期数n
t
≥1,n
t
个扫描周期时间为激光雷达扫描一帧的时间,记为帧周期;
9.步骤3、捕获微振镜在振动过程中产生的角度反馈电信号,结合预设扫描角度序列表,在微振镜运动到第x个帧周期中的预设扫描角度序列表中第y个预设扫描角度时输出x_y电脉冲信号,驱动光源产生脉冲光束,脉冲光束准直后经过微振镜发射向被测区域的预设扫描角度y方向;
10.步骤4、接收并存储该预设扫描角度y的前i个飞行时间数据;其中i为大于等于1的整数;
11.步骤5、重复步骤3,4,直至存储完m个帧周期,每个帧周期n个预设扫描角度的飞行时间数据;其中x≤m,y≤n;
12.步骤6、依次读取存储的预设扫描角度y在m个帧周期内的所有飞行时间数据;将该预设扫描角度的i*m个飞行时间数据进行滤波后作为该预设扫描角度的最终测量飞行时间;
13.步骤7、重复步骤6,直至完成激光雷达扫描一帧所有n个预设扫描角度的飞行时间数据处理;
14.步骤8:将上述步骤输出的一帧扫描预设角度的最终飞行时间转换为距离信息传输至上位机设备,上传帧率为
15.进一步地,步骤6的滤波处理过程具体为:
16.将该预设扫描角度的i*m个飞行时间数据进行均值滤波或中位值滤波后作为该预设扫描角度的最终测量飞行时间;
17.或,
18.将该预设扫描角度的i*m飞行时间数据根据上下极值与固定时间间隔分割为若干个区间,进而形成该预设扫描角度飞行时间的直方图,并将该直方图的峰值时间位置作为该预设扫描角度的最终测量飞行时间。
19.进一步地,步骤2中预设扫描角度序列表需满足:微振镜振动过程中,先后经过预设扫描角度序列表表中任意两个相邻预设扫描角度ai,a
i+1
的时间间隔ti大于最大回波飞行时间t
max
;其中,;其中,d为激光雷达量程,c为光速。
20.进一步地,上述n个预设扫描角度为等角度间隔均匀分布或非等角度间隔离散分布。
21.进一步地,步骤2具体为:
22.步骤2.1、计算n个预设扫描角度中前相邻两个角度ai,a
i+1
在第一个扫描周期的时间间隔ti;n个预设扫描角度预先按照,振镜一个扫描周期内,先后扫描到的角度进行排序;
23.步骤2.2、比较ti与t
max
,其中若ti>t
max
,则将ai,a
i+1
按先后顺序进行排序,放入第一个扫描周期的预设扫描角度序列表;否则,进入步骤2.3;
24.步骤2.3、保留ai继续作为第一个扫描周期的预设扫描角度序列表的计算,将a
i+1
从n个预设扫描角度中剔除,保留至第二个扫描周期的预设扫描角度序列表的计算;
25.步骤2.4、计算保留至第一个扫描周期的预设扫描角度序列表ai,a
i+2
,a
i+3
…
计算的预设扫描角度中前相邻两个角度在第一个扫描周期的时间间隔ti;重复步骤2.2至2.3的操作,直至完成第一个扫描周期的预设扫描角度序列表;
26.步骤2.5、计算保留至第二个扫描周期的预设扫描角度序列表计算的预设扫描角度中前相邻两个角度在第二个扫描周期的时间间隔ti;重复步骤2.2至2.4操作,直至完成第二个扫描周期的预设扫描角度序列表;保留至第二个扫描周期的预设扫描角度序列表计算的预设扫描角度也是按照,振镜一个扫描周期内,先后扫描到的角度进行排序;
27.步骤2.6、依次计算保留至第三、四
…
个扫描周期扫描预设扫描角度序列表计算的预设扫描角度中前相邻两个角度在相应扫描周期的时间间隔ti;重复步骤2.2至2.4操作,完成相应扫描周期的预设扫描角度序列表,直至覆盖完成所有扫描预设角度。
28.进一步地,步骤1中利用控制电路产生周期性驱动电信号至微振镜驱动电路,控制微振镜按设定振幅a/2与设定频率f简谐振动。
29.进一步地,步骤3中,逻辑处理电路捕获微振镜在振动过程中产生的角度反馈电信号;光源驱动电路捕获上述x_y电脉冲信号驱动光源产生脉冲激光束,脉冲激光束通过收发光路形成准直光束并经过微振镜发射向被测区域的预设角度y方向。
30.进一步地,步骤4中利用控制电路接收该预设扫描角度y的前i个飞行时间数据,并存储于存储电路地址为x*y的存储单元;
31.通过下述过程获取预设扫描角度y的前i个飞行时间数据:
32.被测区域的预设角度y方向返回的若干个光脉冲回波信号通过微振镜与收发光路或单独通过收发光路汇聚至光接收元件,光接收元件产生光感电流,飞行时间读出电路将上述光感电流放大并转换为该预设角度y的若干个飞行时间数据。
33.进一步地,步骤6利用控制电路依次读取存储的预设扫描角度y在m个帧周期内的所有的飞行时间数据。
34.本发明还提供一种单线mems激光雷达的测距方法,其特殊之处在于,包括以下步骤:
35.步骤1、控制微振镜按设定振幅a/2与设定频率f做简谐振动;其中a为激光雷达整体扫描角;
36.步骤2、根据激光雷达量程与微振镜参数,计算激光雷达扫描一帧所有n个预设扫描角度所需的扫描周期数n
t
以及n
t
个扫描周期组成的预设扫描角度序列表,并存储;其中扫描周期数n
t
≥1,n
t
个扫描周期时间为激光雷达扫描一帧的时间,记为帧周期;
37.步骤3、捕获微振镜在振动过程中产生的角度反馈电信号,结合预设扫描角度序列表,在微振镜运动到第x个帧周期中的预设扫描角度序列表中第y个预设扫描角度时输出x_y电脉冲信号,驱动光源产生脉冲光束,脉冲光束准直后经过微振镜发射向被测区域的预设扫描角度y方向;
38.步骤4、接收并存储该预设扫描角度y的前i个飞行时间数据;其中i为大于等于1的整数;
39.步骤5、重复步骤3,4,直至存储完m1个帧周期,每个帧周期n1个预设感兴趣扫描角度的飞行时间数据;
40.或,重复步骤3,4,直至存储完m2个帧周期,每个帧周期n2个预设非感兴趣扫描角度的飞行时间数据;
41.其中,n1+n2=n,n为预设扫描角度个数,且m1《m2;
42.步骤6、依次读取存储的预设感兴趣扫描角度y1在i*m1个帧周期内的所有飞行时间数据;将该感兴趣预设扫描角度的i*m1个飞行时间数据进行滤波后作为该预设扫描角度的最终测量飞行时间;
43.或,依次读取存储的预设非感兴趣扫描角度y2在i*m2个帧周期内的所有飞行时间数据;将该非感兴趣预设扫描角度的i*m2个飞行时间数据进行滤波后作为该预设扫描角度的最终测量飞行时间;
44.步骤7、重复步骤6,直至所有n1个预设感兴趣扫描角度或所有n2个预设非感兴趣扫描角度的飞行时间数据处理完成;
45.步骤8:将上述步骤输出的一帧预设感兴趣或非感兴趣扫描预设角度的最终飞行时间转换为距离信息传输至上位机设备,预设感兴趣扫描角度的上传帧率为预设非感兴趣扫描角度的上传帧率为
46.进一步地,步骤6的滤波处理过程具体为:
47.将该预设扫描角度的i*m1个或i*m2个飞行时间数据进行均值滤波或中位值滤波后作为该预设扫描角度的最终测量飞行时间;
48.或,
49.将该预设扫描角度的i*m1个或i*m2个飞行时间数据根据上下极值与固定时间间隔分割为若干个区间,进而形成该预设扫描角度飞行时间的直方图,并将该直方图的峰值时间位置作为该预设扫描角度的最终测量飞行时间。
50.进一步地,步骤2中预设扫描角度序列表需满足:微振镜振动过程中,先后经过预设扫描角度序列表表中任意两个相邻预设扫描角度ai,a
i+1
的时间间隔ti大于最大回波飞行时间t
max
;其中,;其中,d为激光雷达量程,c为光速。
51.进一步地,上述n个预设扫描角度为等角度间隔均匀分布或非等角度间隔离散分布;n1个预设感兴趣扫描角度与n2个预设非感兴趣扫描角度分别是连续的角度区间或离散的角度组合。
52.进一步地,步骤2具体为:
53.步骤2.1、计算n个预设扫描角度中前相邻两个角度ai,a
i+1
在第一个扫描周期的时间间隔ti;n个预设扫描角度预先按照,振镜一个扫描周期内,先后扫描到的角度进行排序;
54.步骤2.2、比较ti与t
max
,其中若ti>t
max
,则将ai,a
i+1
按先后顺序进行排序,放入第一个扫描周期的预设扫描角度序列表;否则,进入步骤2.3;
55.步骤2.3、保留ai继续作为第一个扫描周期的预设扫描角度序列表的计算,将a
i+1
从n个预设扫描角度中剔除,保留至第二个扫描周期的预设扫描角度序列表的计算;
56.步骤2.4、计算保留至第一个扫描周期的预设扫描角度序列表ai,a
i+2
,a
i+3
…
计算的预设扫描角度中前相邻两个角度在第一个扫描周期的时间间隔ti;重复步骤2.2至2.3的操作,直至完成第一个扫描周期的预设扫描角度序列表;
57.步骤2.5、计算保留至第二个扫描周期的预设扫描角度序列表计算的预设扫描角度中前相邻两个角度在第二个扫描周期的时间间隔ti;重复步骤2.2至2.4操作,直至完成第二个扫描周期的预设扫描角度序列表;保留至第二个扫描周期的预设扫描角度序列表计算的预设扫描角度也是按照,振镜一个扫描周期内,先后扫描到的角度进行排序;
58.步骤2.6、依次计算保留至第三、四
…
个扫描周期扫描预设扫描角度序列表计算的预设扫描角度中前相邻两个角度在相应扫描周期的时间间隔ti;重复步骤2.2至2.4操作,完成相应扫描周期的预设扫描角度序列表,直至覆盖完成所有扫描预设角度。
59.进一步地,步骤1中利用控制电路产生周期性驱动电信号至微振镜驱动电路,控制微振镜按设定振幅a/2与设定频率f简谐振动。
60.进一步地,步骤3中,逻辑处理电路捕获微振镜在振动过程中产生的角度反馈电信号;光源驱动电路捕获上述x_y电脉冲信号驱动光源产生脉冲激光束,脉冲激光束通过收发光路形成准直光束并经过微振镜发射向被测区域的预设角度y方向。
61.进一步地,步骤4中利用控制电路接收该预设扫描角度y的前i个飞行时间数据,并
存储于存储电路地址为x*y的存储单元;
62.通过下述过程获取预设扫描角度y的前i个飞行时间数据:
63.被测区域的预设角度y方向返回的若干个光脉冲回波信号通过微振镜与收发光路或单独通过收发光路汇聚至光接收元件,光接收元件产生光感电流,飞行时间读出电路将上述光感电流放大并转换为该预设角度y的若干个飞行时间数据。
64.进一步地,步骤6利用控制电路依次读取存储的预设感兴趣扫描角度y1在m1个帧周期内的所有的飞行时间数据,
65.或利用控制电路依次读取存储的预设非感兴趣扫描角度y2在m2个帧周期内的所有的飞行时间数据。
66.本发明还提供一种单线mems激光雷达的测距系统,其特殊之处在于:包括激光发射单元、微振镜单元、激光接收单元与主控单元;
67.微振镜单元分别与激光发射单元,激光接收单元光耦合;主控单元分别与激光发射单元,激光接收单元,微振镜单元电连接;
68.激光发射单元用于根据主控单元指令产生脉冲激光束;
69.微振镜单元用于将脉冲激光束发射向被测空间的各个被测角度,并同时接收被测空间各个角度的反射光脉冲回波信号并汇聚至激光接收单元;还用于产生微振镜在振动过程中的角度反馈电信号并发送至主控单元;
70.激光接收单元用于将接收到的被测空间各个角度的反射光脉冲回波信号转换为飞行时间数据并发送至主控单元;
71.主控单元用于实现上述单线mems激光雷达的测距方法。
72.进一步地,上述主控单元包括逻辑处理电路,控制电路与存储电路;
73.逻辑处理电路用于实时捕获微振镜在振动过程中产生的角度反馈电信号并转化为激光雷达各预设扫描角度的连续电脉冲信号,将上述各扫描角度的连续电脉冲信号输出至激光发射单元;
74.控制电路用于输出周期性驱动电信号至微振镜单元,使微振镜按一定振幅与周期简谐振动;并用于根据激光雷达量程d与微振镜参数,计算激光雷达扫描一帧所有n个预设扫描角度所需的扫描周期数n
t
以及n
t
个扫描周期组成的预设扫描角度序列表;
75.控制电路还用于同步接收激光接收单元输出的同步飞行时间数据;
76.控制电路还用于依次读取存储的预设扫描角度y在相应帧周期内的所有的飞行时间数据;将该预设扫描角度的多个飞行时间数据进行滤波后作为该预设扫描角度的最终测量飞行时间;
77.存储电路用于以各预设扫描角度为索引地址存储n
t
个扫描周期预设扫描角度y的若干个飞行时间数据。
78.进一步地,控制电路将该预设扫描角度的多个飞行时间数据进行滤波后作为该预设扫描角度的最终测量飞行时间具体为:
79.将该预设扫描角度的多个飞行时间数据进行均值滤波或中位值滤波后作为该预设扫描角度的最终测量飞行时间;
80.或,
81.将该预设扫描角度的多个飞行时间数据根据上下极值与固定时间间隔分割为若
干个区间,进而形成该预设扫描角度飞行时间的直方图,并将该直方图的峰值时间位置作为该预设扫描角度的最终测量飞行时间。
82.进一步地,逻辑处理电路为fpga或cpld逻辑器件中的一种;控制电路是cpu,dsp或mcu器件中的一种;存储电路是sram、dram或sdram存储器件中的一种。
83.进一步地,激光发射单元包括光源驱动电路与光源;
84.光源驱动电路用于捕获逻辑处理电路输出的各预设扫描角度的电脉冲信号,驱动光源产生脉冲激光束。
85.进一步地,微振镜单元包括收发光路,微振镜,微振镜驱动电路及角度反馈电路;
86.收发光路为共轴光路,用于准直光源产生的脉冲激光束至微振镜,还用于接收被测空间在微振镜上的反射光脉冲回波信号并汇聚至激光接收单元;或,收发光路为离轴光路,用于准直光源产生的激光束至微振镜,也用于直接接收被测空间回波信号并汇聚至激光接收单元;
87.微振镜驱动电路用于接收控制电路输出的周期性驱动电信号,并根据驱动电信号控制微振镜按一定振幅与周期简谐振动,使脉冲激光束发射向被测空间的各个被测角度;
88.角度反馈电路用于产生微振镜在振动过程中的角度反馈电信号并发送至逻辑处理电路。
89.进一步地,激光接收单元包括光接收元件与飞行时间读出电路;
90.光接收元件用于接收被测区域的预设角度y方向返回的若干个光脉冲回波信号,并产生光感电流;
91.飞行时间读出电路用于将上述光感电流放大并转换为该预设角度y的若干个飞行时间数据。
92.进一步地,光接收元件为apd、spad或sipm;飞行时间读出电路包括信号放大电路与时间数字转换电路或数模转换电路。
93.本发明的有益效果是:
94.1、本发明提出了一种单线mems激光雷达的测距方法,对mems振镜同一振动角度(测量角度)的若干次振动周期的单次回波测量数据进行滤波处理,如中值滤波、中位值滤波或形成飞行时间的直方图,将直方图的峰值时间作为最终测量时间,后计算得测量距离。提高了单线mems激光雷达的抗干扰能力与多回波检测能力,大大降低了误检测率,进而提高了单线mems激光雷达的测距性能。
95.2、本发明提出的基于感兴趣区域与非感兴趣区域的不同振动周期数的数据选取提高了单线mems激光雷达的灵活性与可配置性。
96.3、本发明提出的单线mems激光雷达的测距方法,相较于同帧率的机械式单线激光雷达具有较高的采样率,因此具有更高的可靠性。
附图说明
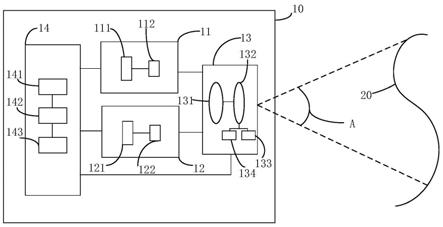
97.图1:单线mems激光雷达系统的原理框图;
98.图2:微振镜扫描过程中预设角度标志电脉冲输出示意图;
99.图3:任一预设角度多个帧周期形成的直方图;
100.图中附图标记为:10-单线mems激光雷达系统,11-激光发射单元,12-激光接收单
元,13-微振镜单元,14-主控单元,20-被测空间,112-光源,111-光源驱动电路,122-光接收元件,121-飞行时间读出电路,132-微振镜,131-收发光路,133-微振镜驱动电路,134-角度反馈电路,141-逻辑处理电路,142-控制电路,143-存储电路,30-一次回波,32-二次回波,31-干扰回波。
具体实施方式
101.本发明单线mems激光雷达测距系统包括激光发射单元11、微振镜单元13、激光接收单元12与主控单元14;微振镜单元13分别与激光发射单元11,激光接收单元12光耦合;主控单元14分别与激光发射单元11,激光接收单元12,微振镜单元13电连接;激光发射单元11用于根据主控单元指令产生脉冲激光束;微振镜单元13用于将脉冲激光束发射向被测空间20的各个被测角度,并同时接收被测空间20各个角度的反射光脉冲回波信号并汇聚至激光接收单元12;还用于产生微振镜在振动过程中的角度反馈电信号并发送至主控单元14;激光接收单元12用于将接收到的被测空间20各个角度的反射光脉冲回波信号转换为飞行时间数据并发送至主控单元14;
102.主控单元14用于完成以下过程,实现测距:
103.步骤1、控制微振镜按设定振幅a/2与设定频率f做简谐振动;其中a为激光雷达整体扫描角;
104.步骤2、根据激光雷达量程d与微振镜参数,计算激光雷达扫描一帧所有n个预设扫描角度所需的扫描周期数n
t
以及n
t
个扫描周期组成的预设扫描角度序列表,并存储;其中扫描周期数n
t
≥1,n
t
个扫描周期时间为激光雷达扫描一帧的时间,为帧周期;n
t
个扫描周期组成的预设扫描角度序列表的建立过程具体如下:
105.步骤2.1、计算n个预设扫描角度中前相邻两个角度ai,a
i+1
在第一个扫描周期的时间间隔ti;n个预设扫描角度预先按照,振镜一个扫描周期内,先后扫描到的角度进行排序;
106.步骤2.2、比较ti与t
max
,其中若ti>t
max
,则将ai,a
i+1
按先后顺序进行排序,放入第一个扫描周期的预设扫描角度序列表;否则,进入步骤2.3;
107.步骤2.3、保留ai继续作为第一个扫描周期的预设扫描角度序列表的计算,将a
i+1
从n个预设扫描角度中剔除,保留至第二个扫描周期的预设扫描角度序列表的计算;
108.步骤2.4、计算保留至第一个扫描周期的预设扫描角度序列表ai,a
i+2
,a
i+3
…
计算的预设扫描角度中前相邻两个角度在第一个扫描周期的时间间隔ti;重复步骤2.2至2.3的操作,直至完成第一个扫描周期的预设扫描角度序列表;
109.步骤2.5、计算保留至第二个扫描周期的预设扫描角度序列表计算的预设扫描角度中前相邻两个角度在第二个扫描周期的时间间隔ti;重复步骤2.2至2.4操作,直至完成第二个扫描周期的预设扫描角度序列表;保留至第二个扫描周期的预设扫描角度序列表计算的预设扫描角度也是按照,振镜一个扫描周期内,先后扫描到的角度进行排序;
110.步骤2.6、依次计算保留至第三、四
…
个扫描周期扫描预设扫描角度序列表计算的预设扫描角度中前相邻两个角度在相应扫描周期的时间间隔ti;重复步骤2.2至2.4操作,完成相应扫描周期的预设扫描角度序列表,直至覆盖完成所有扫描预设角度。
111.步骤3、捕获微振镜在振动过程中产生的角度反馈电信号,结合预设扫描角度序列
表,在微振镜运动到第x个帧周期中的预设扫描角度序列表中第y个预设扫描角度时输出x_y电脉冲信号,驱动光源产生脉冲光束,脉冲光束准直后经过微振镜发射向被测区域的预设扫描角度y方向;
112.步骤4、接收并存储该预设扫描角度y的前i个飞行时间数据;其中i为大于等于1的整数;
113.步骤5、重复步骤3,4,直至存储完m个帧周期,每个帧周期n个预设扫描角度的飞行时间数据;其中x≤m,y≤n;
114.步骤6、依次读取存储的预设扫描角度y在m个帧周期内的所有的飞行时间数据;将该预设扫描角度的i*m个飞行时间数据进行滤波后作为该预设扫描角度的最终测量飞行时间;
115.步骤7、重复步骤6,直至完成激光雷达扫描一帧所有n个预设扫描角度的飞行时间数据处理;
116.步骤8:将上述步骤输出的一帧扫描预设角度的最终飞行时间转换为距离信息传输至上位机设备,上传帧率为
117.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图及具体实施例对本发明做详细的说明,显然所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明的保护的范围。
118.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
119.实施例1
120.如图1,本实施例中的单线mems激光雷达系统10包括激光发射单元11,激光接收单元12,微振镜单元13与主控单元14。激光发射单元11包括光源112与光源驱动电路111。光源驱动电路111用于根据主控电路的控制指令驱动光源112产生脉冲激光束。激光接收单元12包括光接收元件122和飞行时间读出电路121。其中,光接收元件122可以为apd,spad,sipm等。飞行时间读出电路121包括信号放大电路与时间数字转换电路(tdc)或数模转换电路(adc)。光接收元件122用于接收被测区域的预设角度y方向返回的若干个光脉冲回波信号,并产生光感电流;飞行时间读出电路121用于将所述光感电流放大并转换为该预设角度y的若干个飞行时间数据。微振镜单元13包含微振镜132,收发光路131,微振镜驱动电路133,角度反馈电路134。其中,收发光路131可以是一种共轴光路,用于准直光源112产生的激光束至微振镜132,也用于接收被测空间20在微振镜132上的反射光脉冲回波信号至光接收元件122。收发光路131也可以是一种离轴光路,用于准直光源112产生的激光束至微振镜132,也用于直接接收被测空间20反射光脉冲回波信号至光接收元件122。微振镜132可以是静电,电磁或其它驱动形式的单轴微振镜中的一种。微振镜驱动电路133可以是静电式,电磁式或其它驱动形式的驱动电路中的一种,用于接收控制电路142输出的周期性驱动电信号,并根据驱动电信号控制微振镜132按一定振幅与周期简谐振动,使脉冲激光束发射向被测空间20的各个被测角度。角度反馈电路134可以是光电式,电容式,压阻式或其它角度反馈电路
中的一种,用于产生微振镜在振动过程中的角度反馈电信号并发送至逻辑处理电路。
121.主控单元14包含逻辑处理电路141,控制电路142与存储电路143。逻辑处理电路141可以为fpga,cpld等逻辑器件中的一种。控制电路142可以是cpu,dsp,mcu等器件中的一种。存储电路143可以是sram,dram,sdram等存储器件中的一种。控制电路142用于输出周期性驱动电信号至微振镜驱动电路133,使微振镜按一定振幅与周期简谐振动,并用于根据激光雷达量程d与微振镜参数,计算激光雷达扫描一帧所有n个预设扫描角度所需的扫描周期数n
t
以及n
t
个扫描周期组成的预设扫描角度序列表。逻辑处理电路141用于实时捕获角度反馈电路134的电信号生成激光雷达各预设扫描角度的连续电脉冲信号。逻辑处理电路141还用于将上述各扫描角度的连续电脉冲信号输出至光源驱动电路111。
122.控制电路142还用于同步获取飞行时间读出电路121输出的同步飞行时间数据,以若干个振镜半周期(为振镜从正向/反向最大幅值位置运动至反向/正向最大幅值位置的时间,以下称扫描周期)于存储电路143分块顺序存储,以各预设扫描角度为索引地址在块内存储。控制电路142还用于依次读取存储的预设扫描角度y在m个帧周期内的所有的飞行时间数据;将该预设扫描角度的i*m个飞行时间数据进行滤波后作为该预设扫描角度的最终测量飞行时间。
123.本实施例基于上述系统的测距方法包括以下步骤:
124.步骤1:控制电路142产生周期性驱动电信号至微振镜驱动电路133,使微振镜132按设定振幅a/2与设定频率f稳幅简谐振动。所述设定振幅为激光雷达整体扫描角a的光学半角。
125.步骤2:控制电路142根据激光雷达量程d与微振镜132参数计算扫描一帧所有n个预设扫描角度所需的扫描周期数n
t
以及n
t
个扫描周期组成的预设扫描角度序列表,并存储。
126.所述n
t
个扫描周期时间为激光雷达系统扫描一帧的时间,为帧周期。其中,扫描周期数n
t
≥1。
127.所述预设扫描角度序列表需满足:微振镜132振动过程中先后经过表中任意两个相邻预设扫描角度ai,a
i+1
的时间间隔ti大于最大回波飞行时间为t
max
。以保证预设扫描角度a
i+1
方向的光脉冲发射之前预设扫描角度ai方向的光脉冲回波信号已完成接收。其中,c为光速。
128.所述n个预设扫描角度可以是等角度间隔均匀分布,也可以是非等角度间隔离散分布。
129.步骤3:角度反馈电路134在微振镜132的振动过程中产生角度反馈电信号,逻辑处理电路141捕获上述电信号,并结合预设扫描角度序列表解算后,在微振镜运动到第x个帧周期中的预设扫描角度序列表中第y个预设扫描角度时产生x_y电脉冲信号。
130.如图2,本实施例激光雷达预设扫描角度为4个,分别为a1,a2,a3,a4,t0,t1,t2,t3,t4,t5为6个扫描周期,t1,t2,t3,t4分别为在t0扫描周期内的a1,a2,a3,a4角度对应的时间值,t5,t6分别为在t1扫描周期内的a4,a2角度对应的时间值。结合某微振镜参数满足t2-t1<t
max
,t3-t1>t
max
,t4-t3<t
max
,t5-t3>t
max
,t6-t5>t
max
,根据步骤2的计算方法,可以确定帧周期为2个扫描周期,在该帧周期内预设扫描角度序列表为a1,a3,a4,a2。0_0,0_1,0_2,0_3为一个x=0的帧周期(包含两个扫描周期t0,t1)内标志预设扫描角度a1,a3,a4,
a2实时位置的电脉冲信号,其它帧周期内的角度标志电脉冲依据帧周期循环输出。
131.同时,光源驱动电路111捕获上述x_y电脉冲信号驱动光源112产生脉冲激光束,脉冲激光束通过收发光路131形成准直光束并经过微振镜132发射向被测区域20的预设扫描角度y方向。
132.步骤4:被测区域20的预设扫描角度y方向返回的若干个光脉冲回波信号通过微振镜132与收发光路131或单独通过收发光路131汇聚至光接收元件122,光接收元件122产生光感电流,飞行时间读出电路121将所述光感电流放大并转换为该预设扫描角度y的若干个飞行时间数据。
133.同时,控制电路142将上述预设扫描角度y的前i个飞行时间数据暂存于存储电路143地址为x*y的存储单元。其中i为大于等于1的整数;一般地,存储前两个回波的飞行时间数据。
134.步骤5:重复步骤3,4,直至控制电路142存储完m个帧周期,每个帧周期n个预设扫描角度的飞行时间数据。其中x≤m,y≤n;
135.步骤6:控制电路142依次读取存储电路143中各预设扫描角度y在m个帧周期内的所有的飞行时间数据。
136.一般地,可以将该角度2*m个飞行时间数据进行均值滤波或中位值滤波后作为该角度的最终测量飞行时间。
137.优选地,将该角度2*m个飞行时间数据根据上下极值与固定时间间隔分割为若干个区间,进而形成该角度飞行时间的直方图,并将该直方图的峰值时间位置作为该角度最终测量的飞行时间。
138.一般地,上述直方图包含该角度两次回波的飞行时间数据。如图3为某预设扫描角度m个帧周期形成的直方图,其中包含一次回波30,二次回波32与干扰回波31。将一次回波30与二次回波32形成的直方图峰值时间作为两次回波的飞行时间。一般地,上述时间间隔为100ps,即距离分辨率为1.5cm。
139.步骤7:重复步骤6至所有n个预设扫描角度的飞行时间数据处理完成。
140.步骤8:将上述步骤输出的一帧预设扫描角度的最终飞行时间转换为距离信息传输至上位机设备,上传帧率为
141.实施例2
142.本实施例中的单线mems激光雷达系统与实施例1中系统组成一致,区别在于本实施例中激光雷达系统可实现对用户感兴趣区域与非感兴趣区域的配置。本发明将用户对某一段扫描角度区间帧率要求较高的区域称为用户感兴趣区域,反之称为用户非感兴趣区域。并将本系统整体扫描角度区分为感兴趣与非感兴趣扫描角度。
143.本实施例中激光雷达系统可根据上述不同角度区间实现不同帧周期大小的角度直方图。进而获取到感兴趣区域高帧率与非感兴趣区域低帧率的距离信息。
144.本发明基于上述系统的测距方法包括以下步骤:
145.步骤1:控制电路142产生周期性驱动电信号至微振镜驱动电路133,使微振镜132按设定振幅a/2与设定频率f稳幅简谐振动。
146.所述设定振幅为激光雷达整体扫描角a的光学半角。
147.步骤2:控制电路142根据激光雷达量程d与微振镜132参数计算扫描一帧所有n个预设扫描角度所需的扫描周期数n
t
以及n
t
个扫描周期组成的预设扫描角度序列表,并存储。
148.所述n
t
个扫描周期时间为激光雷达系统扫描一帧的时间,为帧周期。其中,扫描周期数n
t
≥1。
149.所述预设扫描角度序列表需满足:微振镜132振动过程中先后经过表中任意两个相邻预设扫描角度ai,a
i+1
的时间间隔ti大于最大回波飞行时间为t
max
。以保证预设扫描角度a
i+1
方向的光脉冲发射之前预设扫描角度ai方向的光脉冲回波信号已完成接收。其中,c为光速。
150.所述n个预设扫描角度可以是等角度间隔均匀分布,也可以是非等角度间隔离散分布。
151.步骤3:角度反馈电路134在微振镜132的振动过程中产生角度反馈电信号,逻辑处理电路141捕获上述电信号,并结合预设扫描角度序列表解算后,在振镜运动到第x个帧周期中的预设扫描角度序列表中第y个预设扫描角度时产生x_y电脉冲信号。
152.同时,光源驱动电路111捕获上述x_y电脉冲信号驱动光源112产生脉冲光束,脉冲光束通过收发光路131形成准直光束并经过微振镜132发射向被测区域20的预设扫描角度y方向。
153.步骤4:被测区域20的预设扫描角度y方向返回的若干个光脉冲回波信号通过微振镜132与收发光路131或单独通过收发光路131汇聚至光接收元件122,光接收元件122产生光感电流,飞行时间读出电路121将所述光感电流放大并转换为该预设扫描角度y的若干个飞行时间数据。
154.同时,控制电路142将上述预设扫描角度y的前i个飞行时间数据暂存于存储电路143地址为x*y的存储单元。一般地,存储前两个回波的飞行时间数据。
155.步骤5:重复步骤3,4,直至控制电路142存储完m1个帧周期,每个帧周期n1个预设感兴趣扫描角度的飞行时间数据。
156.或,控制电路142存储完m2个帧周期,每个帧周期n2个预设非感兴趣扫描角度的飞行时间数据。
157.其中,n1+n2=n,为本系统预设扫描角度个数,且m1《m2;
158.其中,n1个预设感兴趣扫描角度与n2个预设非感兴趣扫描角度分别可以是连续的角度区间也可以是离散的角度组合。
159.步骤6:控制电路142依次读取预设感兴趣扫描角度y1在m1个帧周期内的所有的飞行时间数据。
160.或,控制电路142依次读取预设非感兴趣扫描角度y2在m2个帧周期内的所有的飞行时间数据。
161.一般地,可以将该角度2*m1或2*m2个飞行时间数据进行均值滤波或中位值滤波后作为该角度的最终测量飞行时间。
162.优选地,将该角度2*m1或2*m2个飞行时间数据根据上下极值与固定时间间隔分割为若干个区间,进而形成该角度飞行时间的直方图,并将该直方图的峰值时间位置作为该角度最终测量的飞行时间。
163.步骤7:重复步骤6至所有n1个预设感兴趣扫描角度或所有n2个预设非感兴趣扫描角度的飞行时间数据处理完成。
164.步骤8:将上述步骤输出的一帧预设感兴趣或非感兴趣扫描角度的最终飞行时间转换为距离信息传输至上位机设备。预设感兴趣扫描角度的上传帧率为预设非感兴趣扫描角度的上传帧率为
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1