一种双足机器人足底受力状态检测系统及方法与流程
1.本发明属于机器人技术领域,尤其涉及一种双足机器人足底受力状态检测系统及方法。
背景技术:
2.当双足机器人在行走过程中,需要实时获取双足机器人足底的受力状况,以此避免机器人发生倾覆或者摔倒。双足机器人步行时,脚底会受到两种类型的力,一种为竖直方向力,一种为水平方向力。其中,前者为重力与冲击力的合力,后者来源主要为摩擦力。这两种力将会影响机器人的步行稳定性。其中,依据机器人脚底竖直方向力的分布可以计算出脚底的零力矩点,依据水平方向力的分布可以计算出脚底零力矩点处的等效摩擦力矩。
3.目前,要测量双足机器人脚底的足底的受力状况大都需要使用六维力/力矩传感器,然而这种传感器售价昂贵且安装不便。
技术实现要素:
4.本发明的目的是克服现有技术存在的缺陷,提供一种双足机器人足底受力状态检测系统及方法。
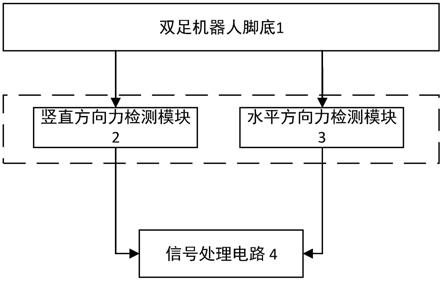
5.本发明目的是通过以下技术方案来实现的:一种双足机器人足底受力状态检测系统,包括双足机器人脚底、竖直方向力检测模块、水平方向力检测模块以及信号处理电路;竖直方向力检测模块采集双足机器人脚底沿竖直方向上的受力状态数据;水平方向力检测模块采集双足机器人脚底沿水平方向上的受力状态数据;信号处理电路负责处理竖直方向力检测模块以及水平方向力检测模块所产生的数据。
6.进一步地,竖直方向力检测模块包括阵列式压阻薄膜压力传感器;所述阵列式压阻薄膜压力传感器具有m行n列共m
×
n个传感器单元。
7.进一步地,水平方向力检测模块包括水平方向力测量单元块、薄膜压力传感器;水平方向力测量单元块的外形为长方体;双足机器人脚底设置有凹腔,水平方向力测量单元块部分嵌入凹腔,水平方向力测量单元块的高度不小于凹腔的深度;凹腔的四个内壁分别设置一个薄膜压力传感器,薄膜压力传感器设置在水平方向力测量单元块与凹腔之间;双足机器人脚底至少设置一个水平方向力检测模块;所有水平方向力检测模块内设置的薄膜压力传感器组成一个s行4列的水平方向薄膜传感器阵列,s为水平方向力检测模块的数量。
8.进一步地,所述信号处理电路包括竖直方向力检测模块驱动电路、水平方向力检测模块驱动电路以及数据处理电路;竖直方向力检模块驱动电路、水平方向力检测模块驱动电路分别连接数据处理电路。
9.进一步地,数据处理电路用于将竖直方向力检测模块驱动电路以及水平方向力检测模块驱动电路产生的模拟信号进行滤波、模数转换并输出给单片机或者微处理器进行运算。
10.进一步地,竖直方向力检测模块驱动电路包括n选一多路选择器、m选一多路选择
器、m个电阻以及m个运算放大器;n选一多路选择器的n个通道分别与阵列式压阻薄膜压力传感器的n列连接;n选一多路选择器的共同接线端与电源vcc连接;m个运算放大器的反相输入端分别与阵列式压阻薄膜压力传感器的m行,其同相输入端分别与地相连,其输出端分别与m选一多路选择器的m个通道相连,m个电阻的一端分别与m个运算放大器的反相输入端连接,另一端分别与m个运算放大器的输出端连接,m选一多路选择器的共同接线端与数据处理电路连接。
11.进一步地,水平方向力检测模块驱动电路包括4选1多路选择器,s选1多路选择器,s个电阻,s个运算放大器,4选一多路选择器的4个通道分别与阵列式压阻薄膜压力传感器的4列连接,其共同接线端与电源vdd连接;s个运算放大器的反相输入端分别与水平方向薄膜传感器阵列的s行,其同相输入端分别与地相连,其输出端分别与s选一多路选择器的s个通道相连,s个电阻的一端分别与s个运算放大器的反相输入端连接,另一端分别与s个运算放大器的输出端连接,s选一多路选择器的共同接线端与数据处理电路连接。
12.进一步地,所述凹腔的顶部内壁与水平方向力测量单元块固接。
13.进一步地,所述水平方向力检测模块的薄膜压力传感器为压阻型薄膜压力传感器。
14.进一步地,所述竖直方向力检测模块还包括上缓冲层以及下缓冲层;上缓冲层、阵列式压阻薄膜压力传感器、下缓冲层依次连接。
15.一种双足机器人足底受力状态检测方法,包括如下步骤:
16.s1.确定双足机器人足底一点为原点o,沿着足底的前向方向为x轴,垂直于足底向上方向为z轴,根据右手定则确定y轴,据此,获取竖直方向力检测模块中阵列式压阻薄膜压力传感器的传感器单元中心点相对于原点o的坐标,记为(x
ij
,y
ij
),获取所有水平方向力检测模块中水平方向力测量单元块中心点相对于原点o的坐标,记为(ui′
,vi′
);
17.s2.标定竖直方向力检测模块中阵列式压阻薄膜压力传感器的所有传感器单元,并获得力与电阻值关系曲线,记为:
18.f
ij
=f(r
ij
)
19.此处,f
ij
与r
ij
分别为竖直方向力检测模块中阵列式压阻薄膜压力传感器第i行第j列的传感器单元的受力大小以及电阻值;
20.标定所有水平方向力检测模块中水平方向薄膜传感器阵列的薄膜压力传感器,并获得力与电阻值关系曲线,记为:
21.gi′j′
=g(ri′
0j
′
)
22.此处,gi′j′
与ri′
0j
′
分别为第i’个水平方向力检测模块中第j’个薄膜压力传感器的受力大小以及电阻值;
23.s3.采集t时刻双足机器人脚底竖直方向受力情况,使用下式计算出竖直方向力检测模块中阵列式压阻薄膜压力传感器的传感器单元的电阻值为:
[0024][0025]
此处,r
ij
为竖直方向力检测模块中阵列式压阻薄膜压力传感器第i行第j列的传感器单元的电阻值,r
fi
为连接第i行的反馈电阻的阻值,vout
ij
为该传感器单元的输出电压值,vcc为n选一多路选择器共同接线端的电压;
[0026]
采集t时刻双足机器人脚底水平方向受力情况,使用下式计算出水平方向力检测模块中薄膜压力传感器的电阻值为:
[0027][0028]
此处,ri′
0j
′
为所有水平方向力检测模块中水平方向薄膜传感器阵列的第i’行第j’列的薄膜压力传感器的电阻值,r
fti
′
为连接第i’行的反馈电阻的阻值,vouti′
0j
′
为该传感器单元的输出电压值,vdd为4选一多路选择器共同接线端的电压;
[0029]
s4.基于步骤s2~s3,获得竖直方向上各个传感器单元的受力数据f
ij
,和水平方向上各个薄膜压力传感器的受力数据gi′j′
;i∈[1,n],j∈[1,m];i
′
∈[1,s],j
′
∈[1,4];
[0030]
利用下式计算水平方向力检测模块沿x轴以及y轴方向的水平方向力:
[0031]
δi′
x
=gi′
a-gi′b[0032]
δi′y=gi′
c-gi′d[0033]
此处,gi′a,gi′b分别表示第i
′
个水平方向力检测模块在x轴方向的两个薄膜压力传感器的受力值,gi′c,gi′d分别表示第i
′
个水平方向力检测模块在y轴方向的两个薄膜压力传感器的受力值;
[0034]
s5.根据步骤s1与s4中获得的坐标以及竖直方向受力数据,根据下式获得双足机器人脚底的零力矩点坐标:
[0035][0036][0037]
此处,p
x
与py代表零力矩点的坐标;
[0038]
s6.根据步骤s1、s4与s5获得零力矩点坐标处的水平方向力产生的力矩τz:
[0039][0040]
本发明的有益效果是:本发明成本较低,安装简单,可以随时增加或者减少垂直方向或者水平方向上传感器单元的数量;本发明不仅能检测双足机器人垂直方向受力分布也能检测水平方向受力分布。
附图说明
[0041]
图1是本发明双足机器人足底受力状态检测系统示意图;
[0042]
图2是本发明阵列式压阻薄膜压力传感器示意图;
[0043]
图3是本发明水平方向力检测模块示意图;
[0044]
图4是本发明竖直方向力检测模块图;
[0045]
图5是本发明信号处理电路功能示意图;
[0046]
图6是本发明竖直方向力检模块驱动电路图;
[0047]
图7是本发明水平方向力检模块驱动电路图;
[0048]
图中:双足机器人脚底1、凹腔10、竖直方向力检测模块2、阵列式压阻薄膜压力传感器20、传感器单元200、上缓冲层21、下缓冲层22、水平方向力检测模块3、水平方向力测量单元块30、薄膜压力传感器31、信号处理电路4、竖直方向力检模块驱动电路41、水平方向力检测模块驱动电路42、数据处理电路43。
具体实施方式
[0049]
以下结合附图对本发明作进一步说明。
[0050]
如图1所示,本发明一种双足机器人足底受力状态检测系统,包括双足机器人脚底1、竖直方向力检测模块2、水平方向力检测模块3以及信号处理电路4。其中,竖直方向力检测模块2采集双足机器人脚底1沿竖直方向上的受力状态数据,水平方向力检测模块3采集双足机器人脚底1沿水平方向上的受力状态数据,信号处理电路4负责处理竖直方向力检测模块1以及水平方向力检测模块2所产生的数据。
[0051]
如图4所示,竖直方向力检测模块2包括阵列式压阻薄膜压力传感器20、上缓冲层21以及下缓冲层22。上缓冲层21的一面与双足机器人脚底1固接,另一面与阵列式压阻薄膜压力传感器20的一面固接,阵列式压阻薄膜压力传感器20的另一面与下缓冲层22的一面固接。上缓冲层21以及下缓冲层22的材料包括橡胶。
[0052]
如图2所示,阵列式压阻薄膜压力传感器20具有m行n列共m
×
n个传感器单元200。
[0053]
如图3所示,水平方向力检测模块3包括水平方向力测量单元块30、薄膜压力传感器31。水平方向力测量单元块30的外形为长方体,双足机器人脚底1设置有凹腔10。水平方向力测量单元块30正好部分嵌入凹腔10;凹腔10内部形状设置为与水平方向力测量单元块30形状相匹配。凹腔10的顶部内壁与水平方向力测量单元块30固接,凹腔10的四个内壁分别设置一个薄膜压力传感器31。水平方向力测量单元块30的高度不小于凹腔10的深度,从而保持水平方向力测量单元块30与地面的接触,以测量足底的水平方向力,水平方向力测量单元块30与凹腔10四壁之间留有间隙,以保证薄膜压力传感器31能够设置在水平方向力测量单元块30与凹腔10之间并且提供预紧力。薄膜压力传感器31为压阻型薄膜压力传感器。两个垂直于前向方向的薄膜压力传感器31用于测量沿前向方向的水平方向力,两个平行于前向方向的薄膜压力传感器31用于测量垂直于前向方向的水平方向力。
[0054]
双足机器人脚底1至少设置一个水平方向力检测模块3,并将所有水平方向力检测模块3内设置的薄膜压力传感器31连接,组成一个具有s行4列的水平方向薄膜传感器阵列;s为水平方向力检测模块3的数量。
[0055]
如图5所示,信号处理电路4包括竖直方向力检模块驱动电路41、水平方向力检测模块驱动电路42以及数据处理电路43。竖直方向力检模块驱动电路41、水平方向力检测模块驱动电路42分别连接数据处理电路43。数据处理电路43用于,将竖直方向力检测模块驱动电路41以及水平方向力检测模块驱动电路42产生的模拟信号,进行滤波、模数转换,并输出给单片机或者微处理器进行运算。
[0056]
如图6所示,竖直方向力检测模块驱动电路41包括n选一多路选择器u1、m选一多路
选择器u2、m个电阻rf1,rf2,
…
,rfm以及m个运算放大器op1,op2,
…
,opm。n选一多路选择器u1的n个通道,分别与阵列式压阻薄膜压力传感器20(r11~rmn阵列)的n列连接;n选一多路选择器u1的共同接线端与电源vcc连接。m个运算放大器op1,op2,
…
,opm的反相输入端,分别与阵列式压阻薄膜压力传感器20(r11~rmn阵列)的m行连接,其同相输入端分别与地相连,其输出端分别与m选一多路选择器u2的m个通道相连。m个电阻rf1,rf2,
…
,rfm的一端分别与m个运算放大器op1,op2,
…
,opm的反相输入端连接,另一端分别与m个运算放大器的输出端op1,op2,
…
,opm连接。m选一多路选择器u2的共同接线端与数据处理电路43连接。
[0057]
如图7所示,水平方向力检测模块驱动电路42包括4选1多路选择器u3、s选1多路选择器u4、s个电阻rft1,rft2,
…
,rfts、s个运算放大器op1,op2,
…
,ops。4选一多路选择器u3的4个通道分别与水平方向薄膜传感器阵列(r101~rs04阵列)的4列连接;4选一多路选择器u3的共同接线端与电源vdd连接。s个运算放大器op1,op2,
…
,ops的反相输入端分别与水平方向薄膜传感器阵列(r101~rs04阵列)的s行,其同相输入端分别与地相连,其输出端分别与s选一多路选择器u4的s个通道相连。s个电阻rft1,rft2,
…
,rfts的一端分别与s个运算放大器op1,op2,
…
,ops的反相输入端连接,另一端分别与s个运算放大器op1,op2,
…
,ops的输出端连接。s选一多路选择器u4的共同接线端与数据处理电路43连接。
[0058]
本发明一种双足机器人足底受力状态检测方法,包括如下步骤:
[0059]
s1.确定双足机器人足底一点为原点o,沿着足底的前向方向为x轴,垂直于足底向上方向为z轴,根据右手定则确定y轴。据此,获取竖直方向力检测模块2中,阵列式压阻薄膜压力传感器20的传感器单元200中心点相对于原点o的坐标,记为(x
ij
,y
ij
),i∈[1,n],j∈[1,m]。获取所有水平方向力检测模块3中水平方向力测量单元块30中心点相对于原点o的坐标,记为(ui′
,vi′
),i
′
∈[1,s]。
[0060]
s2.标定竖直方向力检测模块2中,阵列式压阻薄膜压力传感器20的所有传感器单元200,并获得力与电阻值关系曲线f,记为:
[0061]fij
=f(r
ij
)
[0062]
此处,f
ij
、r
ij
分别为竖直方向力检测模块2中阵列式压阻薄膜压力传感器20第i行第j列的传感器单元200的受力大小、电阻值。
[0063]
标定所有水平方向力检测模块3中,水平方向薄膜传感器阵列的所有薄膜压力传感器31,并获得力与电阻值关系曲线g,记为:
[0064]gi
′j′
=g(ri′
0j
′
)
[0065]
此处,gi′j′
、ri′
0j
′
分别为第i’个水平方向力检测模块3中第j’个薄膜压力传感器31的受力大小、电阻值,对应水平方向薄膜传感器阵列的第i’行第j’列。
[0066]
s3.采集t时刻双足机器人脚底1竖直方向受力情况,使用下式计算出竖直方向力检测模块2中阵列式压阻薄膜压力传感器20的传感器单元200的电阻值为:
[0067][0068]
此处,r
ij
为竖直方向力检测模块2中阵列式压阻薄膜压力传感器20第i行第j列的传感器单元200的电阻值,r
fi
为连接第i行的反馈电阻的阻值,vout
ij
为第i行第j列传感器单元200的输出电压值,vcc为n选一多路选择器u1共同接线端的电压。
[0069]
采集t时刻双足机器人脚底1水平方向受力情况,使用下式计算出所有水平方向力
检测模块3中水平方向薄膜传感器阵列的薄膜压力传感器31的电阻值为:
[0070][0071]
此处,ri′
0j
′
为所有水平方向力检测模块3中水平方向薄膜传感器阵列的第i’行第j’列的薄膜压力传感器31的电阻值,r
fti
′
为连接水平方向薄膜传感器阵列第i’行的反馈电阻的阻值,vouti′
0j
′
为第i行第j列薄膜压力传感器31的输出电压值,vdd为4选一多路选择器u3共同接线端的电压。
[0072]
s4.基于步骤s2~s3,获得竖直方向上各个传感器单元200的受力数据f
ij
,和水平方向上各个薄膜压力传感器31的受力数据gi′j′
;i∈[1,n],j∈[1,m];i
′
∈[1,s],j
′
∈[1,4]。
[0073]
利用下式,可以计算第i
′
个水平方向力检测模块3沿x轴的水平方向力δi′
x
以及y轴方向的水平方向力δi′y:
[0074]
δi′
x
=gi′
a-gi′b[0075]
δi′y=gi′
c-gi′d[0076]
此处,gi′a,gi′b分别表示第i
′
个水平方向力检测模块3在x轴方向的两个薄膜压力传感器31的受力值;gi′c,gi′d分别表示第i
′
个水平方向力检测模块3在y轴方向的两个薄膜压力传感器31的受力值。
[0077]
s5.根据步骤s1获得的坐标(x
ij
,y
ij
)以及步骤s4中获得竖直方向受力数据f
ij
,基于下式可以获得双足机器人脚底1的零力矩点坐标:
[0078][0079][0080]
此处,p
x
与py代表零力矩点的坐标。
[0081]
s6.根据步骤s1获得的坐标(ui′
,vi′
)、步骤s4获得的水平方向力δi′
x
,δi′y与步骤s5获得的零力矩点坐标p
x
,py,计算t时刻零力矩点坐标处的水平方向力产生的力矩τz:
[0082][0083]
上述实施例仅仅是本发明技术构思实现形式的列举,本发明的保护范围不仅限于上述实施例,本发明的保护范围可延伸至本领域技术人员根据本发明的技术构思所能想到
的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1