位置检测装置的制作方法
1.本发明涉及一种检测物体的位置的位置检测装置。
背景技术:
2.以往,已知一种位置检测装置,其具备具有用于显示位置的刻度的标示部和读取刻度的读取部,基于随着读取部和标示部在直线轨道上的相对位置变化而从读取部输出的正弦波信号及余弦波信号,检测标示部或读取部的位置。
3.例如,作为专利文献1中记载的位置检测装置的磁式线性编码器具备作为标示部的磁栅尺和作为读取部的磁阻元件。磁栅尺是以直线状延伸的线性标尺。磁阻元件固定于磁传感器装置的保持架内。磁栅尺及磁传感器装置中的任意一个沿磁栅尺的延伸方向移动。磁栅尺具备作为沿着栅尺延伸方向延伸的刻度的磁道。磁道具备已磁化的磁化区域和非磁化的非磁化区域。磁阻元件随着磁栅尺或磁传感器装置的移动而输出正弦波信号及余弦波信号。磁传感器装置的运算处理部基于从磁阻元件输出的正弦波信号及余弦波信号,检测磁栅尺或磁传感器装置的绝对位置。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2016-38294号公报
技术实现要素:
7.发明所要解决的技术问题
8.在这种磁式线性编码器中,磁栅尺表面和磁阻元件之间的间隙由于磁栅尺或磁传感器装置相对于设备的组装误差而超出规定允许范围变宽或变窄时,无法高精度地检测位置。因此,期望在组装磁栅尺及磁传感器装置时,确认间隙是否在允许范围内,并且根据需要修正组装位置。
9.对于磁栅尺表面和磁阻元件的间隙,作为确认其是否在允许范围内的方法,可考虑通过数字处理对上述正弦波信号或余弦波信号的峰值变动进行解析的方法。具体地说,将从磁阻元件作为模拟信号输出的正弦波信号或余弦波信号通过数字处理转换为数字信号,基于对转换结果实施运算处理所得的波形的各峰值的值,求取间隙的平均值。根据该方法,可以高精度地解析间隙的平均值,但是由于需要新附设数模转换器或数字运算装置等,因此存在成本变高的问题。
10.本发明是鉴于以上背景而完成的,其目的在于提供一种位置检测装置,无需对正弦波信号或余弦波信号进行数字处理就能够容易地确认磁栅尺等标示部和读取部的间隙是否在允许范围内。
11.解决技术问题所采用的技术方案
12.为了实现上述目的,本发明提供一种位置检测装置,其具备具有用于表示位置的刻度的标示部和读取所述刻度的读取部,基于随着所述读取部和所述标示部在规定直线轨
道上的相对位置变化而从所述读取部输出的正弦波信号及余弦波信号,检测所述标示部或所述读取部在所述直线轨道上的位置,其特征在于,具备平均信号生成部和感知信号输出部,所述平均信号生成部生成与所述正弦波信号及所述余弦波信号中的至少任意一方的峰值的平均等效的电压即平均等效电压的信号,所述感知信号输出部输出能够感知的规定感知信号,并且,对于所述平均等效电压,在其处于规定范围内的情况和不在所述范围内的情况下,改变所述感知信号的输出状态。
13.发明效果
14.根据本发明,有以下效果:无需对正弦波信号或余弦波信号进行数字处理就能够容易地确认标示部和读取部之间的间隙是否在允许范围内。
附图说明
15.图1是表示实施方式的磁式编码器装置的立体图。
16.图2是表示上述磁式编码器的磁栅尺的一部分的俯视图。
17.图3是表示上述磁式编码器的磁传感器的俯视图。
18.图4是表示上述磁式编码器的电路的一部分及磁栅尺的框图。
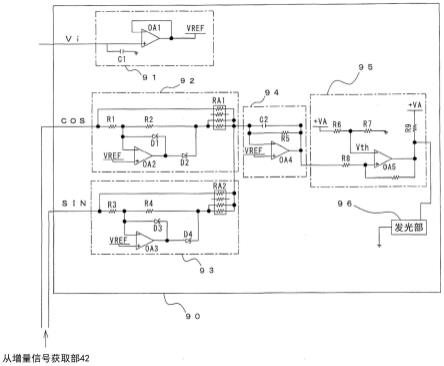
19.图5是表示上述磁式编码器的组装误差检测部的电路的框图。
20.图6是表示在上述磁式编码器中高精度地进行传感器组装时的各种信号的波形的波形图。
21.图7是表示在上述磁式编码器中未高精度地进行传感器组装时的各种信号的波形的波形图。
22.附图标记说明
[0023]1…
磁式编码器装置(位置检测装置);2
…
磁栅尺(标示部);15
…
绝对磁道(刻度);40
…
运算处理部(运算部);92
…
第一全波整流处理部(平均信号生成部的一部分);93
…
第二全波整流处理部(平均信号生成部的一部分);95
…
(感知信号输出部的一部分);96
…
发光部(感知信号输出部的一部分)。
具体实施方式
[0024]
下面,参照附图对作为本发明实施方式的位置检测装置的磁式编码器装置的一实施方式进行说明。此外,在以下的附图中,为了使各结构容易理解,实际的构造以及各构造的比例尺及数量等有时不同。
[0025]
首先,对实施方式的磁式编码器装置的基本结构进行说明。图1是表示实施方式的磁式编码器装置的立体图。此外,图2是表示磁式编码器装置的磁栅尺的一部分的俯视图。
[0026]
如图1所示,磁式编码器装置1具备磁栅尺2和读取磁栅尺2的磁传感器装置3。作为标示部的磁栅尺2是以直线状延伸的形状的线性标尺。磁栅尺2及磁传感器装置3装设于工业用机器人等机器。机器具备能够沿着直线轨道往复移动的移动体,磁栅尺2以沿着其轨道笔直地延伸的状态固定在机器上。磁栅尺2和磁传感器装置3中的任意一方固定在机器的移动体上,并与移动体一起在直线轨道上往复移动。
[0027]
磁栅尺2具备沿着尺子延伸方向延伸的磁道5。当机器的移动体移动时,磁传感器装置3检测形成于磁栅尺2的表面的磁场的磁变化,并输出磁栅尺2或磁传感器装置3的绝对
位置的信号。此外,以下,将移动体的移动方向设为x方向,将与x方向正交并且沿着磁栅尺2的表面的方向设为y方向,对磁式编码器装置1的结构进行说明。
[0028]
磁传感器装置3具备由非磁性材料构成的保持架7、从保持架7延伸的电缆8以及作为读取部的磁传感器10。在保持架7中,在与磁栅尺2对置的对置面9上设置有开口部9a。磁传感器10以与开口部9a对置的姿势固定于保持架7内。
[0029]
图3是表示磁式编码器装置1的磁传感器的俯视图。磁传感器10具备由硅基板、陶瓷基板等构成的传感器基板11。传感器基板11具备形成于与磁栅尺(图2中的2)对置的基板面上的第一磁敏元件12及第二磁敏元件13。第一磁敏元件12和第二磁敏元件13中的每一个例如具有磁阻元件,该磁阻元件具备坡莫合金膜作为磁敏膜。第一磁敏元件12及第二磁敏元件13中的每一个与磁栅尺2隔开规定间隙对置。
[0030]
如图2所示,磁栅尺2的磁道5具备沿着x方向延伸的绝对轨道15和沿着x方向延伸的增量轨道16。绝对轨道15和增量轨道16以沿着y方向排列的形式配置于磁栅尺2。
[0031]
作为绝对指标刻度的绝对轨道15具备沿着y方向排列的第一绝对轨道21及第二绝对轨道22。增量轨道16具备彼此沿着y方向排列的第一增量轨道17及第二增量轨道18。
[0032]
第一绝对轨道21具备沿着x方向排列的多个第一绝对图案21a。多个第一绝对图案21a的每一个是已磁化的区域,具备一组n极及s极。在图2中,附图标记p1表示第一绝对图案21a在x方向上的长度(以下,将该长度称为第一长度p1)。在彼此相邻的第一绝对图案21a之间,配置有非磁化的区域。多个非磁化区域中的每一个在x方向上的长度是随机的。
[0033]
绝对轨道15的第二绝对轨道22具备多个第二绝对图案22a。在第二绝对轨道22中,x方向上的非磁化区域的长度的变化模式与第一绝对轨道21一样。但是,第二绝对图案22a在x方向上配置于比第一绝对图案21a偏移刚好第二长度p2的位置。第二长度p2是第一长度p1的一半。
[0034]
第一绝对轨道15及第二绝对轨道22中的每一个通过连续的n组磁化区域及非磁化区域的排列来表现表示绝对位置的m系列的不规则循环随机数代码。更具体地说,当将磁化区域设为逻辑值1、将非磁化区域设为逻辑值0时,通过连续的n组1和0的排列而用m系列的不规则循环随机数代码值表示。
[0035]
第一增量轨道17具备多个第一增量图案17a。各第一增量图案17a具备沿x方向排列的一组n极及s极。第一增量图案17a的x方向上的长度为第二长度p2。在第一增量轨道17中,n极和s极在x方向上交替排列。
[0036]
第二增量轨道18具备多个第二增量图案18a。各第二增量图案18a具备沿x方向排列的n极及s极。第二增量图案18a在x方向上的长度为第二长度p2。在第二增量轨道18中,n极和s极在x方向上交替排列。第二增量轨道18上的n极和s极的磁化顺序与第一增量轨道17相反。在y方向上,第一增量图案17a的n极和第二增量图案18a的s极相邻,并且第一增量图案17a的s极和第二增量图案18a的n极相邻。
[0037]
如图3所示,磁传感器10的传感器基板11在与磁栅尺2对置的基板面上具备生成绝对信号用的第一磁敏元件12和生成增量信号用的第二磁敏元件13。第一磁敏元件12和第二磁敏元件13彼此沿y方向排列。
[0038]
第一磁敏元件12具备用于检测第一绝对轨道21的磁性的第一磁阻图案31和用于检测第二绝对轨道22的磁性的第二磁阻图案32。第一磁阻图案31及第二磁阻图案32中的每
一个在x方向上延伸,并且彼此沿y方向排列。第一磁阻图案31与第一绝对轨道21对置,第二磁阻图案32与第二绝对轨道22对置。
[0039]
第一磁阻图案31及第二磁阻图案32中的每一个具备以磁敏方向朝向x方向的姿势沿x方向排列的多个磁阻元件。多个磁阻元件以第一长度p1的间距排列。第一磁阻图案31依次检测在x方向上连续的第一绝对图案21a的多个区域中的每一个的磁场并输出m系列的第一绝对信号。同样,第二磁阻图案32依次检测在x方向上连续的第二绝对图案22a的多个区域中的每一个的磁场并输出m系列的第二绝对信号。
[0040]
第二磁敏元件13具备生成正弦波信号即sin+信号的磁阻图案34(+a)及生成余弦波信号即cos+信号的磁阻图案34(+b)。另外,第二磁敏元件13具备生成正弦波信号即sin-信号的磁阻图案34(-a)及生成余弦波信号即cos-信号的磁阻图案34(-b)。生成sin+信号用的磁阻图案34(+a)和生成cos-信号用的磁阻图案34(-b)彼此沿x方向排列。另外,生成cos+信号用的磁阻图案34(+b)和生成sin-信号用的磁阻图案34(-a)彼此沿x方向排列。生成sin+信号用的磁阻图案34(+a)和生成cos+信号用的磁阻图案34(+b)彼此沿y方向排列。生成cos-信号用的磁阻图案34(-b)和生成sin-信号用的磁阻图案34(-a)彼此沿y方向排列。生成sin+信号用的磁阻图案34(+a)及生成cos-信号用的磁阻图案34(-b)与第一增量轨道17对置,且生成sin+信号用的磁阻图案34(+a)及生成cos-信号用的磁阻图案34(-b)与第二增量轨道18对置。
[0041]
伴随机器的移动体的移动,从磁阻图案34(+a)输出的信号和从磁阻图案34(+b)输出的信号彼此具有90
°
的相位差。另外,从磁阻图案34(-a)输出的信号和从磁阻图案34(-b)输出的信号彼此具有90
°
的相位差。另外,从磁阻图案34(+a)输出的信号和从磁阻图案34(-a)输出的信号彼此具有180
°
的相位差。此外,从磁阻图案34(+b)输出的信号和从磁阻图案34(-b)输出的信号彼此具有180
°
的相位差。
[0042]
图4是表示磁式编码器装置1的电路的一部分及磁栅尺2的框图。磁传感器装置3具备运算处理部40,该运算处理部40具有cpu(central processing unit:中央处理单元)、rom(read only memory:只读存储器)、ram(random access memory:随机存取存储器)等。作为运算部的运算处理部40安装于传感器基板11。在运算处理部40的输入侧连接有生成绝对信号用的第一磁敏元件12及生成增量信号用的第二磁敏元件13。运算处理部40具备绝对值获取部41、增量信号获取部42、计算绝对位置的计算部44、组装误差检测部90等。绝对值获取部41具备第一绝对值获取部45和第二绝对值获取部46。
[0043]
生成绝对信号用的第一磁敏元件12的第一磁阻图案31和第一绝对值获取部45构成读取第一绝对轨道21并输出第一绝对值abs1的第一绝对值输出部37。生成绝对信号用的第一磁敏元件12的第二磁阻图案32和第二绝对值获取部46构成读取第二绝对轨道22并输出第二绝对值abs2的第二绝对值输出部38。生成增量信号用的第二磁敏元件13和增量信号获取部42构成读取增量轨道16并输出增量信号inc的增量信号输出部39。
[0044]
第一绝对值获取部45基于从第一磁阻图案31输出的m系列的第一绝对信号(读取结果)获取第一不规则循环随机数代码code1。接着,第一绝对值获取部45将获取的第一不规则循环随机数代码code1置换为整数序列来获取第一绝对值abs1。当第一绝对值获取部45取得第一绝对值abs1时,第一绝对值输出部37输出第一绝对值abs1。
[0045]
第二绝对值获取部46基于从第二磁阻图案32输出的m系列的第二绝对信号(读取
结果)获取第二不规则循环随机数代码code2。另外,第二绝对值获取部46将获取的第二不规则循环随机数代码code2置换为整数序列来获取第二绝对值abs2。当第二绝对值获取部46取得第二绝对值abs2时,第二绝对值输出部38输出第二绝对值abs2。随着机器的移动体的移动,从第一绝对值输出部37输出的第一绝对值abs1和从第二绝对值输出部38输出的第二绝对值abs2以相当于第二长度p2的时长错开输出。
[0046]
增量信号获取部42基于来自生成sin+信号用的磁阻图案34(+a)的信号和来自生成sin-信号用的磁阻图案34(-a)的信号获取正弦波信号。此外,增量信号获取部42基于来自生成cos+信号用的磁阻图案34(+b)的信号和来自生成cos-信号用的磁阻图案34(-b)的信号获取余弦波信号。此外,增量信号获取部42基于正弦波信号及余弦波信号生成从零变化到规定最大值的周期性增量信号inc。当增量信号获取部42生成增量信号inc时,增量信号输出部39输出增量信号inc。
[0047]
计算部44基于第一绝对值abs1、第二绝对值abs2及增量信号c_inc来计算绝对位置。具体地说,在从增量信号c_inc变成0的时刻到修正增量信号c_inc达到零和最大值的中央值期间,计算部44在绝对位置的计算中使用第一绝对值abs1。此外,在从增量信号c_inc变成中央值到修正增量信号c_inc达到最大值的期间t2,计算部44在绝对位置的计算中使用第二绝对值abs2。
[0048]
如上所述,运算处理部40基于正弦波信号(sin信号)和余弦波信号(cos信号)检测绝对位置。
[0049]
接下来,对实施方式的磁式编码器装置1的特征结构进行说明。
[0050]
如图4所示,在运算处理部40中,增量信号获取部42向组装误差检测部90输出sin信号(正弦波信号)及cos信号(余弦波信号)。
[0051]
图5是表示组装误差检测部90的电路的框图。组装误差检测部90具备基准电压生成部91、第一全波整流处理部92、第二全波整流处理部93、低通滤波器94、比较器95及发光部96。
[0052]
基准电压生成部91具备用于稳定输出电压的第一电容器c1及第一运算放大器oa1。第一电容器c1起到稳定输入电压vi的作用。从被输入输入电压vi的第一运算放大器oa1输出已稳定的基准电压vref。
[0053]
从增量信号获取部42送来的cos信号被输入到第一全波整流处理部92。第一全波整流处理部92具备第一电阻r1、第二运算放大器oa2、第二电阻r2、第一二极管d1、第二二极管d2及第一芯片电阻器ra1。经过了第一电阻r1的cos信号被输入到第二运算放大器oa2的反相输入端子(负(-)端子),基准电压vref被输入到非反相输入端子(正(+)端子)。第一全波整流处理部92利用在第一二极管d1及第二二极管d2的每一个中仅使电流沿正方向流动的特性进行如下的处理。即,将cos信号中的比基准电压vref靠正侧的波形部分按原样输出,另一方面,将负侧的波形部分反相到正侧并输出。以下,将经过了全波整流处理部的信号称为全波整流信号。
[0054]
从增量信号获取部42送来的sin信号被输入到第二全波整流处理部93。第二全波整流处理部93具备第三电阻r3、第三运算放大器oa3、第四电阻r4、第三二极管d3、第四二极管d4及第二芯片电阻器ra2。经过了第三电阻r3的sin信号输入到第三运算放大器oa3的反相输入端子(负(-)端子),基准电压vref输入到非反相输入端子(正(+)端子)。第二全波整
流处理部93利用在第三二极管d3及第四二极管d4的每一个中仅使电流沿正方向流动的特性,进行如下的处理。即,将sin信号中的比基准电压vref靠正侧的波形部分按原样输出,另一方面,将负侧的波形部分反相到正侧并输出。
[0055]
由第一全波整流处理部92获得的全波整流信号及由第二全波整流处理部93获得的全波整流信号彼此叠加形成叠加波信号,之后,被输入低通滤波器94。低通滤波器94具备第二电容器c2、第五电阻r5以及第四运算放大器oa4。输入到低通滤波器94的叠加波信号从低通滤波器94中经过,从而噪声被去除。
[0056]
经过了低通滤波器94的叠加波信号输入比较器95。比较器95具备第六电阻r6、第七电阻r7、第八电阻r8、第五运算放大器oa5及第九电阻r9。阈值电压vth被输入到第五运算放大器oa5的负(-)端子。此外,经过了第八电阻r8的叠加波信号被输入到第五运算放大器oa5的正(+)端子。当输入比较器95的正(+)端子的叠加波信号高于阈值电压vth时(叠加波信号>阈值电压vth),比较器95输出规定high(高)电压。另一方面,当输入比较器95的正(+)端子的叠加波信号低于阈值电压vth时(叠加波信号<阈值电压vth),比较器95输出规定low(低)电压。
[0057]
从比较器95输出的high电压或low电压被输入到发光部96。发光部96具备发绿色光的绿色led和发红色光的红色led。在high电压输入到发光部96的情况下,绿色led和红色led两者点亮。由此,从发光部96发出由绿和红混色而成的黄色光。另一方面,在low电压输入到发光部96的情况下,绿色led和红色led中、只有红色led点亮。由此,从发光部96发红色光。
[0058]
图6是表示高精度地进行磁栅尺2向机器的组装及磁传感器装置3的组装(以下,将这些组装统称为传感器组装)时的各种信号的波形的波形图。由于磁栅尺2的表面和磁传感器10之间的间隙越变大,由磁传感器10检测到的磁性越变弱,因此sin波的峰值及cos波的峰值中的每一个变低。在高精度地进行传感器组装的情况下,在cos信号及sin信号中的每一个中,均获得适当的振幅的波形(正弦波和余弦波)。即,磁栅尺2表面和磁传感器10之间的间隙在允许范围内。在同图中,在示出的三个坐标图中的最上面的坐标图中,示出了cos信号的波形和对cos信号实施了全波整流处理后的全波整流信号(fwr(cos))的波形。在全波整流信号(fwr(cos)的波形中,彼此相邻的两个+侧的峰值之间的波谷部的局部区域被负侧的反相波形部填埋。
[0059]
在同图中,在示出的三个坐标图中的正中间的坐标图中,示出了sin信号的波形和对sin信号实施了全波整流处理后的全波整流信号(fwr(sin))的波形。在全波整流信号(fwr(sin))的波形中,彼此相邻的两个+侧的峰值之间的波谷部的局部区域也被负侧的反相波形部填埋。
[0060]
在同图中,在示出的三个坐标图中的最下面的坐标图中,示出了将全波整流信号(fwr(cos))的波形和全波整流信号(fwr(sin))的波形两者叠加而得的叠加波sw的波形。在叠加波sw中,全波整流信号(fwr(cos))和全波整流信号(fwr(sin))用彼此的波峰部补充彼此的波谷部。由此,只在峰值附近的狭窄电压区域内,可以获得轻微波浪形状的稳定的电压波形。峰值附近的高低差低的波浪产生在高于全波整流信号(fwr(cos))和全波整流信号(fwr(sin))中的每一个的峰值的位置。这样的叠加波sw是与sin信号(正弦波信号)及cos信号(余弦波信号)的峰值的平均等效的平均等效电压的信号。即,在实施方式中,图5所示的
第一全波整流处理部92及第二全波整流处理部93的组合作为生成平均等效电压即叠加波sw信号的平均信号生成部发挥作用。
[0061]
在图6所示的例子中,阈值电压vth设定为稍低于叠加前的全波整流信号(fwr(cos))的峰值及叠加前的全波整流信号(fwr(sin))的峰值的值。在这样的设定中,在适当地进行传感器组装的情况下,如图所示,叠加波sw超过阈值电压vth,而与磁栅尺2或磁传感器装置3的位置(坐标图的横轴)无关。由此,当磁栅尺2或磁传感器装置3在直线轨道上移动时,发光部(图5中的36)持续以黄色点亮而与直线轨道上的位置无关。通过该点亮,操作者能够容易地确认磁栅尺2表面和磁传感器10之间的间隙未超出允许范围而扩大。
[0062]
图7是表示未高精度地进行传感器组装时的各种信号的波形的波形图。当由于未高精度地进行传感器组装导致前述间隙超出允许范围而扩大时,在cos信号及sin信号的每一个中,输出如同图所示的低振幅的波形。这样一来,由于叠加波sw的振幅也变成低振幅,因此叠加波sw上的峰值附近的高低差较低的波浪如图所示跨越阈值电压vth。由此,发光部36交替重复黄色发光和红色发光。操作者通过这种交替发光能够容易地确认于传感器组装超出允许范围而扩大。
[0063]
此外,图5所示的比较器95和发光部96的组合作为感知信号输出部发挥作用,该感知信号输出部输出能够感知的感知信号即发光信号,并且,对于平均等效电压,在其处于规定范围内的情况和不在范围内的情况下,改变发光信号的输出状态。
[0064]
在图5~图7所示的组装误差检测部90中,阈值电压vth作为间隙的允许范围的上限值发挥作用。在图5所示的组装误差检测部90中,也可以再追加一个比较器,只有当叠加波sw的电压处于阈值电压vth1(下限值)~阈值电压vth2的范围内时,使发光部36以规定颜色点亮。
[0065]
对作为平均等效电压输出叠加波sw的例子进行了说明,但也可以通过峰值保持电路持续地输出sin信号或cos信号的峰值。但是,在持续地输出峰值的结构中,波形的周期和峰值保持电路的放电时间常数间的关系可能由于使磁栅尺2或磁传感器装置3移动的速度不同而变得不合适,导致难以输出稳定的平均等效电压。
[0066]
另外,对输出可视觉识别的发光信号作为感知信号的例子进行了说明,但感知信号不限于发光信号。例如,也可以输出听觉信号、痛觉信号、温度感觉信号、压力感觉信号、振动感觉信号等作为感知信号。
[0067]
以上,对本发明的优选实施方式进行了说明,但本发明不限于实施方式,在其主旨范围内可以进行多种变形及变更。实施方式包含于发明的范围及主旨内,同时包含于权利要求书所记载的发明及其等同范围内。
[0068]
本发明在以下的每个方式中发挥特有的效果。
[0069]
〔第一方式〕
[0070]
第一方式是一种位置检测装置(例如,磁式编码器装置1),其具备具有用于表示位置的刻度的标示部(例如磁栅尺2)和读取所述刻度的读取部(例如磁传感器10),基于随着所述读取部和所述标示部在规定直线轨道上的相对位置变化而从所述读取部输出的正弦波信号(sin信号)及余弦波信号(cos信号),检测所述标示部或所述读取部在所述直线轨道上的位置,其特征在于,具备平均信号生成部(例如第一全波整流处理部92及第二全波整流处理部93的组合)和感知信号输出部(例如比较器95和发光部96的组合),所述平均信号生
成部生成与所述正弦波信号及所述余弦波信号中的至少任意一方的峰值的平均等效的电压即平均等效电压(例如叠加波sw)的信号,所述感知信号输出部输出能够感知的规定感知信号,并且,对于所述平均等效电压,在其处于规定范围内的情况和不在所述范围内的情况下,改变所述感知信号的输出状态。
[0071]
根据第一方式,无需对正弦波信号、余弦波信号进行数字处理就能够容易地确认标示部和读取部之间的间隙是否在允许范围内。
[0072]
〔第二方式〕
[0073]
第二方式是一种位置检测装置,其特征在于,具备第一方式的结构,并且所述平均信号生成部将对所述正弦波信号实施了全波整流后的全波整流信号和对所述余弦波信号实施了全波整流后的全波整流信号叠加而得的叠加波信号作为所述平均等效电压的信号输出。
[0074]
根据第二方式,与输出由峰值保持电路保持的保持峰值作为平均等效电压的结构相比,能够抑制由于标示部和读取部的相对位置变化速度不合适而导致的平均等效电压不合适的情况。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1