光场测量方法、装置及存储介质与流程
1.本技术涉及光学检测技术领域,具体涉及一种光场测量方法、装置及存储介质。
背景技术:
2.对于时间长度处于飞秒量级的激光器而言,如何准确测量该激光器的光场信息是当前研究热点之一。在现有的检测系统中,有利用自相关法来测量飞秒激光器的脉冲宽度,但该方法丢失了相位、载频信息以及光谱分布。尽管之后提出了时域光谱分析以及频域分辨光学开关法,但与之相配套的迭代复原出飞秒激光器的光场信息的方法所需时间长。
技术实现要素:
3.本技术实施例提供一种光场测量方法、装置及存储介质,以解决现有迭代方法复原出飞秒激光器的光场信息所需时间长的问题。
4.为了解决上述问题,本技术实施例提供了一种光场测量方法,该光场测量方法包括:
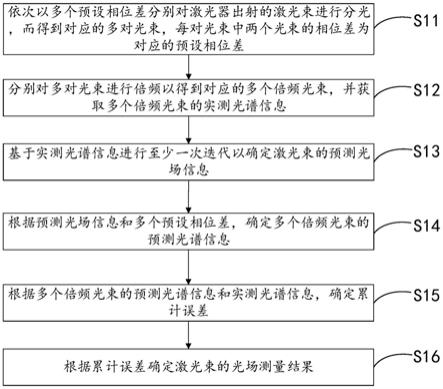
5.依次以多个预设相位差分别对激光器出射的激光束进行分光,而得到对应的多对光束,每对光束中两个光束的相位差为对应的预设相位差;
6.分别对多对光束进行倍频以得到对应的多个倍频光束,并获取多个倍频光束的实测光谱信息;
7.基于实测光谱信息进行至少一次迭代以确定激光束的预测光场信息;
8.根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息;
9.根据多个倍频光束的预测光谱信息和实测光谱信息,确定累计误差;
10.根据累计误差确定激光束的光场测量结果。
11.其中,根据累计误差确定激光束的光场测量结果,具体包括:
12.当累计误差小于预设阈值时,将预测光场信息作为激光束的光场测量结果;
13.当累计误差大于等于预设阈值时,进行下一次迭代,以更新激光束的预测光场信息,之后返回执行根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息的步骤。
14.其中,进行下一次迭代,以更新激光束的预测光场信息,具体包括:
15.根据最近两次迭代的结果,确定对应的振幅梯度因子和相位梯度因子;
16.基于实测光谱信息和振幅梯度因子对最近一次迭代的结果所包含的振幅进行更新,并基于相位梯度因子对最近一次迭代的结果所包含的相位进行更新,以得到下一次迭代的结果;
17.基于更新后的振幅和相位,更新预测光场信息所包含的谱域信息;
18.基于更新后的谱域信息,更新预测光场信息所包含的时域信息。
19.其中,根据多个倍频光束的预测光谱信息和实测光谱信息,确定累计误差,具体包括:
20.确定每一倍频光束的预测光谱信息和实测光谱信息的差值的绝对值,以得到每一倍频光束的预测误差;
21.确定多个倍频光束的预测误差的均方根值,以得到累计误差。
22.其中,根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息,具体包括:
23.根据预测光场信息所包含的时域信息和多个预设相位差,确定多个倍频光束的预测时域信息;
24.分别对多个倍频光束的预测时域信息进行傅里叶变换并乘以自身共轭,以对应得到多个倍频光束的预测光谱信息。
25.为了解决上述问题,本技术实施例提供了一种光场测量装置,该光场测量装置包括:
26.分光模块,用于依次以多个预设相位差分别对激光器出射的激光束进行分光,而得到对应的多对光束,每对光束中两个光束的相位差为对应的预设相位差;
27.倍频模块,用于分别对多对光束进行倍频以得到对应的多个倍频光束,并获取多个倍频光束的实测光谱信息;
28.第一确定模块,用于基于实测光谱信息进行至少一次迭代以确定激光束的预测光场信息;
29.第二确定模块,用于根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息;
30.第三确定模块,用于根据多个倍频光束的预测光谱信息和实测光谱信息,确定累计误差;
31.第四确定模块,用于根据累计误差确定激光束的光场测量结果。
32.其中,第四确定模块,具体用于:
33.当累计误差小于预设阈值时,将预测光场信息作为激光束的光场测量结果;
34.当累计误差大于等于预设阈值时,进行下一次迭代,以更新激光束的预测光场信息,之后触发第二确定模块重新执行根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息。
35.其中,进行下一次迭代,以更新激光束的预测光场信息,具体包括:
36.根据最近两次迭代的结果,确定对应的振幅梯度因子和相位梯度因子;
37.基于实测光谱信息和振幅梯度因子对最近一次迭代的结果所包含的振幅进行更新,并基于相位梯度因子对最近一次迭代的结果所包含的相位进行更新,以得到下一次迭代的结果;
38.基于更新后的振幅和相位,更新预测光场信息所包含的谱域信息;
39.基于更新后的谱域信息,更新预测光场信息所包含的时域信息。
40.其中,第三确定模块具体用于:
41.确定每一倍频光束的预测光谱信息和实测光谱信息的差值的绝对值,以得到每一倍频光束的预测误差;
42.确定多个倍频光束的预测误差的均方根值,以得到累计误差。
43.其中,第二确定模块具体用于:
44.根据预测光场信息所包含的时域信息和多个预设相位差,确定多个倍频光束的预测时域信息;
45.分别对多个倍频光束的预测时域信息进行傅里叶变换并乘以自身共轭,以对应得到多个倍频光束的预测光谱信息。
46.本技术实施例还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序适于由处理器加载以执行上述任一项的光场测量方法。
47.本技术提供的光场测量方法、装置及存储介质,通过依次以多个预设相位差分别对激光器出射的激光束进行分光,而得到对应的多对光束,每对光束中两个光束的相位差为对应的预设相位差,然后分别对多对光束进行倍频以得到对应的多个倍频光束,并获取多个倍频光束的实测光谱信息,之后基于实测光谱信息进行至少一次迭代以确定激光束的预测光场信息,并根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息,接着根据多个倍频光束的预测光谱信息和实测光谱信息,确定累计误差,并根据累计误差确定激光束的光场测量结果,从而提供了一种迭代复原激光器光场信息的新方法,以缩短迭代复原出激光器(尤其是飞秒激光器)的光场信息所需的时间。
附图说明
48.下面结合附图,通过对本技术的具体实施方式详细描述,将使本技术的技术方案及其它有益效果显而易见。
49.图1是本技术实施例提供的光场测量方法的流程示意图;
50.图2是本技术实施例提供的改进型的迈克尔逊干涉仪对激光器出射的激光束进行处理的示意图;
51.图3是本技术实施例提供的光场测量方法的另一流程示意图;
52.图4是本技术实施例提供的测量得到的激光器在时域下的光场信息模值分布示意图;
53.图5是本技术实施例提供的测量得到的激光器在谱域下的光场信息模值分布示意图;
54.图6是本技术实施例提供的光场测量装置的结构示意图。
具体实施方式
55.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
56.本技术实施例提供一种光场测量方法及装置。
57.请参阅图1,图1是本技术实施例提供的光场测量方法的流程示意图,该光场测量方法具体流程可以如下:
58.s11.依次以多个预设相位差分别对激光器出射的激光束进行分光,而得到对应的多对光束,每对光束中两个光束的相位差为对应的预设相位差。
59.在本实施例中,上述光场测量方法可以应用于测量激光器(比如,飞秒激光器)的
光场信息,且该光场信息可以包括光场的时域信息和谱域信息。具体地,每对光束中的两个光束可以具有相同的振动方向,且该两个光束中的一个可以作为参考光,另一个可以作为测试光。其中,该测试光和该参考光的相位差等于当前被用以对上述激光束进行分光而形成由该测试光和该参考光所组成的一对光束的预设相位差。
60.在一些实施例中,一对光束中的测试光和参考光的相位可以相同或不同,也即,上述预设相位差可以等于零或不等于零。在一个实施例中,上述预设相位差可以为零值或正值。
61.s12.分别对多对光束进行倍频以得到对应的多个倍频光束,并获取多个倍频光束的实测光谱信息。
62.具体地,在依次以多个预设相位差分别对激光器出射的激光束进行分光,而得到对应的多对包含测试光和参考光的光束的过程中,每得到一对光束,就可以对该对光束进行倍频以得到对应的一个倍频光束,并且每得到一个倍频光束,就可以通过光谱仪获取该倍频光束的光谱信息(也即,实测光谱信息)。
63.在一个具体实施例中,如图2所示,可以利用改进型的迈克尔逊干涉仪20对上述激光器30出射的激光束30l进行处理,以得到与上述多个预设相位差一一对应的多个倍频光束l3的实测光谱信息。
64.具体地,该改进型的迈克尔逊干涉仪20可以包括分光单元21、相位延迟单元22、倍频单元23、光谱测量单元24以及参考镜25。并且,在以上述多个预设相位差中的任意一个预设相位差对上述激光器30出射的一激光束30l进行分光时,该激光束30l会以预设角度照射分光单元21,然后该激光束30l的一部分光线会透过该分光单元21而形成射向倍频单元23的测试光l1,且另一部分光线会被该分光单元21反射至相位延迟单元22并在通过相位延迟单元22后形成射向倍频单元23的参考光l2。其中,该测试光l1和该参考光l2可以相互平行,且在经倍频单元23倍频后能够形成对应的倍频光束l3。之后,该倍频光束l3可以向光谱测量单元24的方向传播而被该光谱测量单元24检测到,从而得到该倍频光束l3的实测光谱信息。
65.在一些实施例中,如图2所示,上述分光单元21可以具体是分束镜,上述相位延迟单元22可以具体包括线性平移台221和角锥棱镜222,上述倍频单元23可以具体包括聚焦透镜231和非线性晶体(或倍频晶体)232,上述光谱测量单元24可以具体是光谱仪。具体地,上述激光束30l在照射至分束镜后,其一部分光线会透过该分束镜并被该分束镜转向90
°
后形成射向聚焦透镜231的上述测试光l1,其另一部分光线会被该分束镜反射至角锥棱镜222中并被该角锥棱镜222转向180
°
后形成射向聚焦透镜231的上述参考光l2。上述测试光l1和上述参考光l2在经过聚焦透镜231折射后可以会聚于一点,并经过该点位置处的非线性晶体232倍频后能够形成对应的倍频光束l3。
66.在上述实施例中,各个预设相位差的取值可以通过调节上述改进型的迈克尔逊干涉仪20中的相位延迟单元22来控制。具体地,可以通过在z方向上移动该相位延迟单元22中的线性平移台221来控制各个预设相位差的取值大小。可以理解的是,在z方向上移动线性平移台221实质上改变的是上述测试光l1和上述参考光l2的光程差,例如,在z方向上向远离分束镜方向移动线性平移台221,会对应增大上述测试光l1和上述参考光l2的光程差,反之,则会减小上述测试光l1和上述参考光l2的光程差。
67.在本实施例中,上述多对光束与上述多个预设相位差一一对应,上述多个倍频光束与上述多个预设相位差一一对应。并且,可以以τ表示预设相位差,从而预设相位差τ所对应的一对光束中的测试光和参考光可以分别被表示为e
t
(t)和er(t-τ),预设相位差τ所对应的一倍频光束可以被表示为e
doubel_w
,且e
doubel_w
=ce
t
(t)er(t-τ),其中,c表示常数。相应地,预设相位差τ所对应的倍频光束e
doubel_w
的实测光谱信息可以被表示为i
spectrum
(w,τ),且i
spectrum
(w,τ)=|ft[ce
t
(t)er(t-τ]|2,其中,ft表示傅里叶变换算子,用于将时域(即时间域)t上的信号转变为谱域(即频率域)w上的信号。
[0068]
可以理解的是,相比较于直接测量激光束而得到实测光谱信息,本实施例通过测量倍频光束而得到实测光谱信息,能够具有更大的光谱测量时间范围,从而有利于减小测量误差。
[0069]
在一个具体实施例中,如图2所示,上述倍频单元23还可以包括小孔光阑233,该小孔光阑233能够对从非线性晶体232出射的光线进行筛选,以筛选出上述倍频光线l3,从而减小或避免从非线性晶体232出射的非倍频光线(也即,上述测试光l1和上述参考光l2中通过了非线性晶体232但未被倍频的光线)进入到光谱测量单元24中,提高了光谱测量单元24测量倍频光束l3的实测光谱信息的准确性。
[0070]
s13.基于实测光谱信息进行至少一次迭代以确定激光束的预测光场信息。
[0071]
在本实施例中,上述激光束的预测光场信息可以包括预测得到的光场的谱域信息和时域信息等信息。
[0072]
具体地,在迭代开始前,也即,在进行第1次迭代前,可以预先设定迭代的初始值(也即,第零次迭代的结果),且上述激光束初始的预测光场信息由该第零次迭代的结果确定。其中,该第零次迭代的结果可以包括与上述多个预设相位差τ一一对应的多个初始的振幅、以及与上述多个预设相位差τ一一对应的多个初始的相位,且由该第零次迭代确定得到的初始的预测光场信息可以包括初始的时域信息以及与上述多个预设相位差τ一一对应的多个初始的谱域信息。
[0073]
在一个实施例中,在第零次迭代的结果中,预设相位差τ对应的振幅和相位可以分别被表示为和jφ(t,τ),并且,由第零次迭代确定得到的初始的预测光场信息所包含的与该预设相位差τ对应的谱域信息可以被表示为且基于此,由第零次迭代确定得到的初始的预测光场信息所包含的时域信息可以被表示为且其中,ift是傅里叶逆变换算子。也即,可以通过对上述多个预设相位差τ对应的谱域信息先分别进行傅里叶逆变换再进行累加,以得到对应的时域信息
[0074]
在一个实施例中,上述至少一次迭代可以具体为一次迭代,对应上述s13可以具体为:基于实测光谱信息进行第一次迭代以确定激光束的预测光场信息。
[0075]
具体地,基于实测光谱信息进行第一次迭代以确定激光束的预测光场信息,可以包括:分别利用与上述多个预设相位差τ一一对应的多个倍频光束e
doubel_w
的实测光谱信息i
spectrum
(w,τ)的振幅sqrt(i
spectrum
(w,τ))对第零次迭代的结果中的与该多个预设相位差τ
一一对应的多个振幅进行对应更新,以得到第一次迭代的结果;基于更新后的振幅,更新上述预测光场信息所包含的谱域信息;基于更新后的谱域信息,更新上述预测光场信息所包含的时域信息。
[0076]
在上述第一次迭代的结果中,预设相位差τ对应的振幅和相位可以分别被表示为和jφ(t,τ),且对应由第一次迭代确定得到的预测光场信息所包含的与该预设相位差τ对应的谱域信息可以被表示为且基于此,第1次迭代获得的时域信息可以被表示为且
[0077]
s14.根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息。
[0078]
具体地,可以在进行上述至少一次迭代(比如,k次迭代,其中,k≥1)之后,且在进行下一次迭代(比如,第(k+1)次迭代)之前,根据预测光场信息和多个预设相位差τ,确定与该多个预设相位差τ一一对应的多个倍频光束的预测光谱信息。也即,上述预测光场信息和预测光谱信息可以分别是由第k次迭代确定得到的预测光场信息和预测光谱信息。
[0079]
在一个实施例中,上述s14可以具体包括:
[0080]
s141:根据预测光场信息所包含的时域信息以及多个预设相位差,确定多个倍频光束的预测时域信息。
[0081]
具体地,上述预测光场信息所包含的时域信息是上述第k次迭代确定得到的预测光场信息所包含的时域信息并且预设相位差τ所对应的倍频光束的预测时域信息可以被表示为且其中,c表示光速,k表示波矢量,j表示常数。
[0082]
s142:分别对多个倍频光束的预测时域信息进行傅里叶变换并乘以自身共轭,以对应得到多个倍频光束的预测光谱信息。
[0083]
具体地,在进行上述至少一次迭代(比如,k次迭代)之后,且在进行下一次迭代(比如,第(k+1)次迭代)之前,预设相位差τ所对应的倍频光束的预测光谱信息可以被表示为且其中,conj()是求共轭的函数。
[0084]
s15:根据多个倍频光束的预测光谱信息和实测光谱信息,确定累计误差。
[0085]
其中,上述s15可以具体包括:
[0086]
s151:确定每一倍频光束的预测光谱信息和实测光谱信息的差值的绝对值,以得到每一倍频光束的预测误差。
[0087]
具体地,在进行上述至少一次迭代(比如,k次迭代)之后,且在进行下一次迭代(比如,第(k+1)次迭代)之前,预设相位差τ所对应的倍频光束的预测误差可以被表示为errork(w,τ),且其中,abs()是求绝对值的函数。
[0088]
s152:确定多个倍频光束的预测误差的均方根值,以得到累计误差。
[0089]
具体地,在进行上述至少一次迭代(比如,k次迭代)之后,且在进行下一次迭代(比如,第(k+1)次迭代)之前,累计误差可以被表示为calcul_errork(w,τ),且
其中,abs()是求绝对值的函数,sqrt()是平方根的函数,∑是求和公式,n表示预设相位差τ的数量。
[0090]
s16.根据累计误差确定激光束的光场测量结果。
[0091]
其中,如图3所示,上述s16可以具体包括:
[0092]
s161.当累计误差小于预设阈值时,将预测光场信息作为激光束的光场测量结果。
[0093]
s162.当累计误差大于等于预设阈值时,进行下一次迭代,以更新激光束的预测光场信息,之后返回执行上述s14(或s141)。
[0094]
在本实施例中,上述预设阈值可以由实际需要的光场测量精度确定,在一个实施例中,上述预设阈值可以介于10-6
~10-5
之间。其中,该累计误差越小,说明最近一次迭代确定得到的预测光场信息越接近上述激光束真实的光场信息。
[0095]
具体地,在进行上述至少一次迭代(比如,k次迭代)之后,且在进行下一次迭代(比如,第(k+1)次迭代)之前,若计算得到的累计误差calcul_errork(w,τ)小于上述预设阈值时,则说明第k次迭代确定得到的预设光场信息能够达到上述激光器的光场测量精度要求,从而能够停止迭代,并可将上述第k次迭代确定得到的预设光场信息作为上述激光器的光场测量结果输出。在一个实施例中,上述光场测量结果所包含的测量得到的上述激光束的光场的时域信息可以如图4所示,上述光场测量结果所包含的测量得到的上述激光束的光场的谱域信息可以如图5所示。
[0096]
并且,若计算得到的累计误差calcul_errork(w,τ)不小于上述预设阈值,则说明第k次迭代确定得到的预测光场信息相对于上述激光器真实的光场信息的误差较大。因而,需要增加迭代次数(比如,进行第(k+1)次迭代)来对上述第k次迭代确定得到的预测光场信息进行更新,以减小通过迭代方法测量上述激光器的光场信息的误差。
[0097]
可以理解的是,上述s162、s14以及s15能够构成循环,且每循环一次,对应迭代次数会增加一次,并且一旦计算得到的累计误差能够达到要求(也即,小于上述预设阈值),该循环就会停止。在一些实施例中,还可以预先设置迭代次数的上限值,从而在迭代次数达到该上限值时,即使计算得到的累计误差仍不能够达到要求,也可停止该循环(也即,该循环在迭代次数达到该上限值时会被强制停止)。
[0098]
一个具体实施例中,上述进行下一次迭代,以更新激光束的预测光场信息,可以具体包括:
[0099]
s1-1:根据最近两次迭代的结果,确定对应的振幅梯度因子和相位梯度因子。
[0100]
具体地,在上述下一次迭代为第(k+1)次迭代时,该最近两次迭代分别为第k次迭代和第(k-1)次迭代,其中,k≥1,例如,若k等于1,则最近两次迭代分别为第1次迭代和第0次迭代,若k等于2,则最近两次迭代分别为第2次迭代和第1次迭代。并且,在进行上述第k次迭代之后,且在进行第(k+1)次迭代之前,可以基于第k次迭代的结果和第(k-1)次迭代的结果,确定对应的振幅梯度因子和相位梯度因子。
[0101]
其中,振幅梯度因子可以被表示为且且
[0102]
相位梯度因子可以被表示为且,且,其中,angle()是求相位角的函数。
[0103]
其中,为第k次迭代的结果所包含的与预设相位差τ对应的振幅,为第(k-1)次迭代的结果所包含的与预设相位差τ对应的振幅,为第(k+1)次迭代的结果所包含的与预设相位差τ对应的振幅。
[0104]
s1-2:基于实测光谱信息和振幅梯度因子对最近一次迭代的结果所包含的振幅进行更新,并基于相位梯度因子对最近一次迭代的结果所包含的相位进行更新,以得到下一次迭代的结果。
[0105]
具体地,可以将最近一次迭代(也即,第k次迭代)的结果所包含的与各预设相位差τ对应的各振幅模值分别替换为,各相对应预设相位差τ所对应的实测光谱信息i
spectrum
(w,τ)的振幅sqrt(i
spectrum
(w,τ))与上述振幅梯度因子之和。也即,第(k+1)次迭代的结果所包含的与预设相位差τ对应的振幅模值为
[0106]
并且,可以将最近一次迭代(也即,第k次迭代)的结果所包含的与各预设相位差τ对应的各相位分别替换为,第k次迭代的结果所包含的各相对应预设相位差τ所对应的相位与上述相位梯度因子之和。也即,第(k+1)次迭代的结果所包含的与预设相位差τ对应的相位为
[0107]
s1-3:基于更新后的振幅和相位,更新预测光场信息所包含的谱域信息。
[0108]
具体地,上述第(k+1)次迭代更新得到的预测光场信息所包含的预设相位差τ对应的谱域信息可以被表示为且
[0109]
s1-4:基于更新后的谱域信息,更新预测光场信息所包含的时域信息。
[0110]
具体地,上述第(k+1)次迭代更新得到的预测光场信息所包含的时域信息可以被表示为且也即,第(k+1)次迭代更新得到的预测光场信息所包含的时域信息是通过对上述多个预设相位差τ对应的先分别进行傅里叶逆变换再进行叠加而得到的。
[0111]
可以理解的是,在本实施例中,从第二次迭代开始,每进行一次迭代都会在谱域和时域对光场预测结果更新,也即,通过在谱域和时域添加约束条件,实现了谱域和时域迭代更新。并且,在此基础上,进一步引入相位梯度因子和振幅梯度因子,能够构成双梯度共轭下降,从而加速收敛,并跳过极小值,能够实现最小值的搜寻,因而能够快速重建激光器的
光场信息。
[0112]
由上可知,本实施例提供的光场测量方法,通过依次以多个预设相位差分别对激光器出射的激光束进行分光,而得到对应的多对光束,每对光束中两个光束的相位差为对应的预设相位差,然后分别对多对光束进行倍频以得到对应的多个倍频光束,并获取多个倍频光束的实测光谱信息,之后基于实测光谱信息进行至少一次迭代以确定激光束的预测光场信息,并根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息,接着根据多个倍频光束的预测光谱信息和实测光谱信息,确定累计误差,并根据累计误差确定激光束的光场测量结果,从而提供了一种迭代复原激光器光场信息的新方法,以缩短迭代复原出激光器(尤其是飞秒激光器)的光场信息所需的时间。
[0113]
在上述实施例所述方法的基础上,本实施例将从光场测量装置的角度进一步进行描述,请参阅图6,图6具体描述了本技术实施例提供的光场测量装置,其可以包括:分光模块601、倍频模块602、第一确定模块603、第二确定模块604、第三确定模块604和第四确定模块604,其中:
[0114]
(1)分光模块601
[0115]
分光模块601,用于依次以多个预设相位差分别对激光器出射的激光束进行分光,而得到对应的多对光束,每对光束中两个光束的相位差为对应的预设相位差。
[0116]
(2)倍频模块602
[0117]
倍频模块602,用于分别对多对光束进行倍频以得到对应的多个倍频光束,并获取多个倍频光束的实测光谱信息。
[0118]
(3)第一确定模块603
[0119]
第一确定模块603,用于基于实测光谱信息进行至少一次迭代以确定激光束的预测光场信息。
[0120]
(4)第二确定模块604
[0121]
第二确定模块604,用于根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息。
[0122]
在一个实施例中,上述第二确定模块604可以具体用于:
[0123]
根据预测光场信息所包含的时域信息和多个预设相位差,确定多个倍频光束的预测时域信息;
[0124]
分别对多个倍频光束的预测时域信息进行傅里叶变换并乘以自身共轭,以对应得到多个倍频光束的预测光谱信息。
[0125]
(5)第三确定模块605
[0126]
第三确定模块605,用于根据多个倍频光束的预测光谱信息和实测光谱信息,确定累计误差。
[0127]
在一个实施例中,上述第三确定模块605可以具体用于:
[0128]
确定每一倍频光束的预测光谱信息和实测光谱信息的差值的绝对值,以得到每一倍频光束的预测误差;
[0129]
确定多个倍频光束的预测误差的均方根值,以得到累计误差。
[0130]
(6)第四确定模块606
[0131]
第四确定模块606,用于根据累计误差确定激光束的光场测量结果。
[0132]
其中,上述第四确定模块606可以具体用于:
[0133]
当累计误差小于预设阈值时,将预测光场信息作为激光束的光场测量结果;
[0134]
当累计误差大于等于预设阈值时,进行下一次迭代,以更新激光束的预测光场信息,之后触发上述第二确定模块604重新执行根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息。
[0135]
在一个具体实施例中,上述进行下一次迭代,以更新激光束的预测光场信息,可以具体包括:
[0136]
根据最近两次迭代的结果,确定对应的振幅梯度因子和相位梯度因子;
[0137]
基于实测光谱信息和振幅梯度因子对最近一次迭代的结果所包含的振幅进行更新,并基于相位梯度因子对最近一次迭代的结果所包含的相位进行更新,以得到下一次迭代的结果;
[0138]
基于更新后的振幅和相位,更新预测光场信息所包含的谱域信息;
[0139]
基于更新后的谱域信息,更新预测光场信息所包含的时域信息。
[0140]
需要说明的是,具体实施时,以上各个模块可以作为独立的实体来实现,也可以进行任意组合,作为同一或若干个实体来实现,以上各个模块的具体实施可参见前面的方法实施例,在此不再赘述。
[0141]
由上可知,本实施例提供的光场测量装置,包括分光模块,用于依次以多个预设相位差分别对激光器出射的激光束进行分光,而得到对应的多对光束,每对光束中两个光束的相位差为对应的预设相位差;倍频模块,用于分别对多对光束进行倍频以得到对应的多个倍频光束,并获取多个倍频光束的实测光谱信息;第一确定模块,用于基于实测光谱信息进行至少一次迭代以确定激光束的预测光场信息;第二确定模块,用于根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息;第三确定模块,用于根据多个倍频光束的预测光谱信息和实测光谱信息,确定累计误差;第四确定模块,用于根据累计误差确定激光束的光场测量结果,从而提供了一种迭代复原激光器光场信息的新方法,以缩短迭代复原出激光器(尤其是飞秒激光器)的光场信息所需的时间。
[0142]
相应地,本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,且该计算机程序能够被处理器进行加载,以执行本技术实施例所提供的任一种光场测量方法中的步骤。例如,该计算机程序可以执行如下步骤:
[0143]
依次以多个预设相位差分别对激光器出射的激光束进行分光,而得到对应的多对光束,每对光束中两个光束的相位差为对应的预设相位差;
[0144]
分别对多对光束进行倍频以得到对应的多个倍频光束,并获取多个倍频光束的实测光谱信息;
[0145]
基于实测光谱信息进行至少一次迭代以确定激光束的预测光场信息;
[0146]
根据预测光场信息和多个预设相位差,确定多个倍频光束的预测光谱信息;
[0147]
根据多个倍频光束的预测光谱信息和实测光谱信息,确定累计误差;
[0148]
根据累计误差确定激光束的光场测量结果。
[0149]
以上各个操作的具体实施可参见前面的实施例,在此不再赘述。
[0150]
其中,该计算机可读存储介质可以包括:只读存储器(rom,read only memory)、随机存取记忆体(ram,random access memory)、磁盘或光盘等。
[0151]
由于该计算机可读存储介质中所存储的计算机程序,可以执行本技术实施例所提供的任一种光场测量方法中的步骤,因此,可以实现本技术实施例所提供的任一种光场测量方法所能实现的有益效果,详见前面的实施例,在此不再赘述。
[0152]
以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1