可弯曲电子皮肤、手推功能车及可弯曲电子皮肤制备方法与流程
1.本技术涉及电子皮肤技术领域,特别涉及一种可弯曲电子皮肤、手推功能车及可弯曲电子皮肤制备方法。
背景技术:
2.现有的电子皮肤采用电路板为刚性结构设计,其不能进行大角度弯折,此外现有电子皮肤上的传感器和空气接触,在高温度/高湿度作业环境下,电子皮肤会存在温度漂移和电阻漂移/氧化等情况,使得电子皮肤感应数据时不够精准。同时,由于现有电子皮肤感不能在恶劣环境下精准感应数据,也限制了电子皮肤的应用场景,如现有的数据采集车并非通过电子皮肤感应用户操作以对其进行运动控制。
技术实现要素:
3.有鉴于此,有必要提供一种可弯曲电子皮肤及可弯曲电子皮肤制备方法以适用大角度弯折及提高电子皮肤在恶劣环境下感应数据的准确性;还有必要提供一种手推功能车,以通过电子皮肤感应到的用户操作对其进行运动控制。
4.一种可弯曲电子皮肤,包括弹性片,还包括柔性电路板、压力传感器及凝胶,所述压力传感器电连接并凸设于所述柔性电路板,用于感测施加于可弯曲电子皮肤上的压力,所述弹性片连接于所述压力传感器上,所述凝胶填充于所述柔性电路板与所述弹性片之间的空隙。
5.一种手推功能车,包括车体、转动连接于车体底部的多个车轮及固定于车体上的第一扶手、第二扶手及控制装置,所述第一扶手及所述第二扶手上均设置有上述可弯曲电子皮肤,两所述可弯曲电子皮肤及多个所述车轮与所述控制装置电连接,所述压力传感器还用于感测到的压力传送至所述控制装置,所述控制装置根据所述压力控制多个所述车轮的运动。
6.一种可弯曲电子皮肤制备方法,包括步骤:
7.提供柔性电路板;
8.在柔性电路板的预定位置电连接压力传感器及温度传感器;
9.将弹性片压至压力传感器上;
10.在弹性片与电路板之间注入凝胶以填充柔性电路板与弹性片之间的空隙;
11.固化填充于柔性电路板与弹性片之间的凝胶。
12.本技术的可弯曲电子皮肤、手推功能车及可弯曲电子皮肤制备方法中采用柔性电路板作为载体,实现了可弯曲电子皮肤可大角度弯折并在柔性电路板与弹性片之间的空隙填充凝胶,避免压力传感器与空气接触,从而使压力传感器不受外部环境的影响,延长了可弯曲电子皮肤的高精度感测的时间。
附图说明
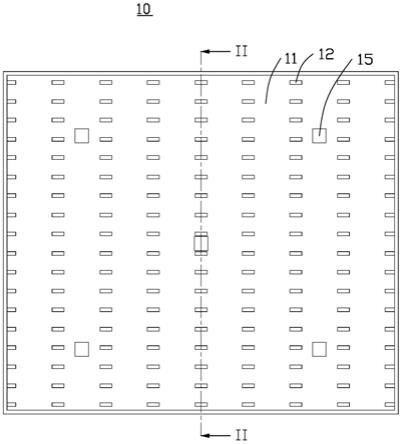
13.图1为本技术提供的可弯曲电子皮肤的示意图。
14.图2为图1中的可弯曲电子皮肤沿ii-ii方向的剖面图。
15.图3为本技术提供的手推功能车的立体图。
16.图4为图3中的手推功能车的左视图。
17.图5为本技术中可弯曲电子皮肤制备方法在第一实施方式的流程图。
18.图6为本技术中可弯曲电子皮肤制备方法在第二实施方式的流程图。
19.图7为图6中步骤s544的示意图。
20.主要元件符号说明
21.[0022][0023]
如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
[0024]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0025]
在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、顺时
针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0026]
在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
[0027]
在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度小于第二特征。
[0028]
下文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
[0029]
请参阅图1-2,本技术提供了一种可弯曲电子皮肤10。可弯曲电子皮肤10包括柔性电路板11、压力传感器12、弹性片13及凝胶14,压力传感器12电连接并凸设于柔性电路板11,用于感测施加于可弯曲电子皮肤10上的压力,弹性片13连接于压力传感器12上,凝胶14填充于柔性电路板11与弹性片13之间的空隙。可弯曲电子皮肤10由于采用柔性电路板11作为载体并在柔性电路板11与弹性片13之间的空隙填充凝胶14,实现了可弯曲电子皮肤10可大角度弯折,也避免了压力传感器12与空气接触,从而使压力传感器12不受外部环境的影响,提高可弯曲电子皮肤10在恶劣环境下感应数据的准确性,扩大了可弯曲电子皮肤10的应用场景。
[0030]
具体地,在一些实施方式中,可弯曲电子皮肤10的形状为圆环形,使可弯曲电子皮肤10可套设于其他物件上,如扶手上。所述压力传感器12为陶瓷压变电阻应变片,由于陶瓷具有热塑性好、不易生锈、温度曲线较为均匀、热绝缘性优异、刚度高等优点,使陶瓷压变电阻应变片感测的压力准确又不易受到环境的不利影响。凝胶14为硅凝胶14qgel310,硅凝胶14qgel310具有抗震、防潮及均热等优点,如此,凝胶14填充于柔性电路板11与弹性片13之间的空隙,可实现可弯曲电子皮肤10内的压力传感器12的密封,并对可弯曲电子皮肤10进行抗震、防潮及起到均热的效果。
[0031]
可弯曲电子皮肤10还包括凸设于柔性电路板11上的温度传感器15,温度传感器15
与弹性片13之间的距离大于压力传感器12与弹性片13之间的距离,温度传感器15与弹性片13之间填充凝胶。多个压力传感器12在柔性电路板11上矩阵排列,用于感测施加于可弯曲电子皮肤10上各个点的压力,多个温度传感器15置于压力传感器12之间,用于感测可弯曲电子皮肤10上各个区域的温度,从而采集温度变化,以供通过算法补偿温度对于压力传感器的影响。
[0032]
请参阅图3-4,本技术还提供了一种手推功能车100,包括车体20、转动连接于车体20底部的多个车轮及固定于车体20上的第一扶手40、第二扶手50及控制装置60,第一扶手40及第二扶手50上均设置有上述可弯曲电子皮肤10,可弯曲电子皮肤10及多个车轮与控制装置60电连接,压力传感器12还用于感测到的压力传送至控制装置60,控制装置60根据压力控制多个车轮的运动。操作者在人力控制车体20运动时,可通过施加于可弯曲电子皮肤10上的压力控制车轮运动,无需使用车体20运动时所需要的实际力量,如此,降低了操作者的工作强度。
[0033]
具体地,在一些实施方式中,车轮包括至少一第一车轮31,如两个第一车轮31,及至少一第二车轮32,如两个第二车轮32,第一车轮31位于第一扶手40侧,第二车轮32位于第二扶手50侧,每一可弯曲电子皮肤10包括第一侧16及第二侧17。在第一扶手40上的第一侧16的压力大于第二侧17的压力,且第二扶手50上的第一侧16的压力小于第二侧17上的压力时,控制装置60控制第一车轮31朝远离第二车轮32的方向转动,及控制第二车轮32朝靠近第一车轮31的方向转动;在第一扶手40上的所述第一侧16的压力小于所述第二侧17的压力,且第二扶手50上的第一侧16的压力大于第二侧17上的压力时,控制装置60控制第一车轮31朝靠近第二车轮32的方向转动,及控制第二车轮32朝远离第一车轮31的方向转动;在第一扶手40上的第一侧16及第二侧17上的压力及第二扶手50上的第一侧16及第二侧17上的压力同时增大或减小时,控制装置60控制第一车轮31及第二车轮32增大或减小转速。如此,通过施加于第一扶手40及第二扶手50上的力的变化就可控制车轮的运动。
[0034]
第一侧16位于第二侧17的前方。如此,在用户握住第一扶手40及第二扶手50,需要第一车轮31朝向第二车轮32转向时,用户使施加于第一扶手40的第一侧16的压力小于第二侧17的压力,及施加于第二扶手50上的第一侧16的压力大于第二侧17上的压力即可,符合实际操作的需求。
[0035]
车轮包括无刷电机33及与无刷电机33连接的轮毂电机34,控制装置60与无刷电机33电连接,用于控制无刷电机33的转动以改变轮毂电机34的转向,轮毂电机34用于驱动手推功能车100行走。车轮上设置有减震弹簧,以减少车体20运动时的震动。车体20上具有两连拆接口21,第一扶手40及第二扶手50可拆卸地连接于两连拆接口21,使操作者快速地拆卸或更换第一扶手40及第二扶手50。
[0036]
手推功能车100还包括多个检测装置及与多个检测装置连接的数据传输装置80,多个检测装置用于采集车体20所在环境的多个数据并将数据通过数据传输装置80传输至智能装置(图未示)以学习上述环境,以使智能装置更好地适应所在环境,其中采集的数据中包括图像数据。
[0037]
检测装置包括至少两个第一图像采集装置71及至少两个第一距离传感器72,至少两个第一图像采集装置71及至少两个第一距离传感器72固定于车体20的两侧面,至少两个第一图像采集装置71用于采集车体20两侧面的图像,至少两个第一距离传感器72用于采集
车体20两侧面的物体与车体20之间的距离。其中,至少一个第一图像采集装置71固定于车体20的一侧,用于采集车体20该侧面的图像,至少一个第一图像采集装置71固定于车体20的另一侧,用于采集车体20该侧面的图像;至少一个第一距离传感器72固定于车体20的一侧,用于采集车体20该侧面的物体与车体20之间的距离,至少一个第一距离传感器72固定于车体20的另一侧,用于采集车体20该侧面的物体与车体20之间的距离。在一实施方式中,第一图像采集装置71为鱼眼相机,第一距离传感器72为双目传感器。
[0038]
检测装置还包括第二图像采集装置73及第二距离传感器74。第二图像采集装置73及第二距离传感器74固定于车体20的前方,第二图像采集装置73用于采集车体20前方的图像,第二距离传感器74用于采集车体20前方的物体的位置信息。在一实施方式中,第二图像采集装置73为鱼眼相机,第二距离传感器74为激光雷达。
[0039]
检测装置还包括设置于至少一车轮上的第一惯性测量装置75、设置于车体20上的第二惯性测量装置76及设置于至少一车轮上设置有压力感测器77,第一惯性测量装置75用于采集车体20的位置姿态,第二惯性测量装置76用于采集车体20中心的加速度以计算地面道路的颠簸情况,压力感测器77用于采集车体20的突变载荷。数据传输装置80将所述位置姿态、加速度、车体20两侧面的物体与车体20之间的距离及突变载荷传输至智能装置,以供智能装置根据位置姿态及、加速度、车体20两侧面的物体与车体20之间的距离及突变载荷分析上述环境的图像,更好地学习到上述环境的实际情况,从而更好地适应上述环境。
[0040]
本技术还提供了一种可弯曲电子皮肤10的制备方法,请参阅图5,在第一实施方式中,可弯曲电子皮肤10的制备方法的包括以下步骤。
[0041]
步骤s510:提供柔性电路板11。
[0042]
步骤s520:在柔性电路板11的预定位置电连接压力传感器12及温度传感器15。
[0043]
步骤s530:将弹性片13压至压力传感器12上。
[0044]
步骤s540:在弹性片13与电路板之间注入凝胶14以填充柔性电路板11与弹性片13之间的空隙。
[0045]
步骤s550:固化填充于柔性电路板11与弹性片13之间的凝胶14。
[0046]
上述可弯曲电子皮肤10的制备方法采用柔性电路板11作为载体并在柔性电路板11与弹性片13之间的空隙填充凝胶14,实现了可弯曲电子皮肤10可大角度弯折,也避免了压力传感器12与空气接触,从而使压力传感器12不受外部环境的影响,提高可弯曲电子皮肤10在恶劣环境下感应数据的准确性,扩大了可弯曲电子皮肤10的应用场景。
[0047]
在一实施方式中,固化凝胶14的步骤包括:在150℃的固化条件下固化30分钟;在100℃的固化条件下固化30分钟;在25℃的固化条件下固化24小时。在上述温度及时间的固化条件下,可释放凝胶14的残余应力,从而不会挤压到压力传感器12及温度传感器15。
[0048]
在一实施方式中,步骤s530“将弹性片13压至传感器上”包括步骤:将具有压力传感器12及温度传感器15的柔性电路板11放入工装模具中;及将通过热固化弹性材料形成的弹性片13置入工装模具并压至所述柔性电路板11上;其中,形成弹性片13时的温度与注入凝胶14的温度均为同一预设温度,如25℃。通过热固化方式制备弹性片13时缓慢降温至预设温度,如25℃,以消除固化残余应力。
[0049]
请参阅图6,为第二实施方式中的可弯曲电子皮肤10的制备方法,与第一实施方式中的可弯曲电子皮肤10的制备方法相似,不同之处在于,可弯曲电子皮肤10的制备方法在
注入凝胶14及固化凝胶14之间还包括步骤s542:对注入的凝胶14进行排气。如此,通过排气将弹性片13与柔性电路板11之间的空气排出,进一步避免可弯曲电子皮肤10所在环境对压力传感器12及温度传感器15产生影响。在注入凝胶14及固化凝胶14之间还包括步骤s544:弯折具有凝胶的弹性片13及柔性电路板11。如此,可通过弯折步骤将可弯曲电子皮肤10成型为预定形状。
[0050]
具体地,请参阅图7,步骤s544“弯折具有凝胶的弹性片13及柔性电路板11”包括:将粘性胶贴固定至柔性电路板11远离所述压力传感器12的一侧;将所述粘性胶贴上远离所述柔性电路板11的一侧附着于内衬200上;将外衬300套于弹性片13远离所述柔性电路板11的一侧。
[0051]
本技术领域的普通技术人员应当认识到,以上的实施方式仅是用来说明本技术,而并非用作为对本技术的限定,只要在本技术的实质精神范围之内,对以上实施例所作的适当改变和变化都落在本技术所公开的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1