一种煤矿移动目标定位能力测试装置及测试方法与流程
1.本发明涉及煤矿移动目标定位技术领域,尤其涉及一种煤矿移动目标定位能力测试装置及测试方法。
背景技术:
2.煤矿移动目标定位是在事故发生前进行安全生产监控、事故发生后进行抢险救援管理的关键技术。移动目标定位能够对井下人员与车辆(包括轨道车和胶轮车)这些移动目标综合跟踪和监测,现有的煤矿移动目标定位装置主要使用探测器、微波信标、rfid、红外(ir) 技术、射频(radiofrequency,rf)技术以及射频电磁波与超声相结合的定位技术等来实现。
3.煤矿移动目标定位的定位能力是至关重要的因素,需要对煤矿井下移动目标定位装置的定位精度进行测试评价。
4.然而,现有的实验装置和方法无法对煤矿移动目标定位能力进行测试,而且实验过程中也无法模拟真实的煤矿环境,无法全面考虑煤矿移动目标定位时可能存在的影响因素,进而无法对定位能力进行准确测试。
技术实现要素:
5.本发明要解决的技术问题是针对上述现有技术的不足,提供一种煤矿移动目标定位能力测试装置及测试方法,实现对煤矿移动目标定位能力的测试。
6.为解决上述技术问题,本发明所采取的技术方案是:
7.一方面,本发明提供一种煤矿移动目标定位能力测试装置,包括计时单元、控制单元、激光发射单元、激光接收单元和定速行走装置;
8.所述计时单元包括显示模块、第一电源模块、第一控制模块、第一控制接口、时钟模块、第一无线模块和第一天线组成;
9.其中,第一电源模块与直流供电连接,为计时单元中其他模块提供电源;第一无线模块与第一天线连接;第一控制接口与激光接收器连接;第一无线模块及第一控制接口均与第一控制模块连接;时钟模块与显示模块连接;
10.所述控制单元包括第二电源模块、第二控制模块、清零按钮、开始按钮、usb接口、第二无线模块和第二天线;
11.其中,第二电源模块与直流供电连接,为控制单元中其他模块提供电源;第二无线模块与第二天线连接;清零按钮、开始按钮及usb接口均与第二控制模块连接;使用usb接口、开始按钮或者清零按钮,第二控制模块控制第二无线模块发射信号,用于控制计时单元中的时钟模块;
12.所述定速行走装置包括牵引构件、定速装置、定位车、尾轮、无线接收控制器和遥控器;所述牵引构件一端缠绕在定速装置上,另一端缠绕在尾轮上;所述定位车上设置识别卡支架,用于放置定位识别卡;所述无线接收控制器用于接收遥控器的控制指令,控制定速
装置转动,进而控制定位车在牵引构件上行走。
13.优选地,所述第一电源模块负责将外部12v直流供电转化为5v直流供电;所述第一控制接口负责接收激光接收器的信号,通过第一控制模块控制时钟模块;所述第一无线模块负责接收控制单元的信号,通过第一控制模块控制时钟模块;
14.所述第一控制模块根据第一无线模块和第一控制接口的信号,控制时钟模块,并给出时钟计时、清零、停止信号。
15.优选地,所述时钟模块包括多个时钟,并依据第一控制模块的信号,控制显示模块显示时间状态,无控制信号时显示模块自由显示时间。
16.优选地,所述显示模块采用六位4寸高清led显示,最大显示999999s,最小显示0.01s。
17.优选地,所述激光接收单元包括激光接收器、信号输出接口和电源;所述激光发射单元发射的激光经过光学透镜校准,被激光接收器件接收,随光强不同产生相应强度的电流,电流经过内部放大器放大输出。
18.优选地,所述激光发射单元包括激光发射器、光学透镜和电源;激光发射器经过光学透镜发出红色激光,可控距离为15米。
19.优选地,所述定速装置包括电机、底座、减速箱和制动装置;电机、减速箱、制动装置安装在底座上,电机与减速箱连接,减速箱与制动装置连接,制动装置安装在牵引构件上,牵引构件缠绕在减速箱转轮上;所述定位车由车架和安装在车架底部的动轮组组成;所述识别卡支架由支架和环氧条组件组成;环氧条固定在支架上,支架固定在定位车的车架上。
20.优选地,所述无线接收控制器包括电机控制器、转速控制器和无线接收器;电机控制器与转速控制器连接,无线接收器与转速控制器连接,转速控制器与电机连接,电机控制器用于控制电机启动或停止;转速控制器用于控制电机转速;无线接收器用于接收遥控器的控制指令。
21.另一方面,本发明还提供一种煤矿移动目标定位能力测试方法,包括以下步骤:
22.步骤1、分别在定位分站附近、分站定位区两边界、分站与定位区两边界中间的位置设置多组时钟单元、激光接收器和激光发射器作为测试点,同时在分站附近设置控制单元及移动目标定位系统服务器;将不小于并发识别数m的待测试的定位识别卡固定在环氧条上,再将环氧条固定到支架上,支架固定在定位车上,以定位识别卡无遮挡及安全为准;
23.所述移动目标定位系统服务器记录识别卡卡号、接收时间、距离、收到每个识别卡定位数据的次数及识别卡总数量,并能通过usb接口向控制单元发出指令;
24.步骤2、测试前,移动目标定位系统服务器将定位识别卡数据清零,同时通过与移动目标定位系统服务器的usb接口连接的控制单元向计时单元发出清零信号,计时单元中的第一控制模块收到清零信号,控制时钟模块中的多组时钟单元清零;
25.步骤3、测试开始,用遥控器控制定速装置,使牵引构件带动定位车从分站覆盖边界外以定速向前运动,控制单元控制计时单元计时,并统计所有时钟单元的时间,与移动目标定位系统服务器记录的接收时间对应,计算在同时间内的固定有定位识别卡的定位车移动距离与计时单元所在位置之差;
26.固定有定位识别卡的定位车从分站覆盖边界外以固定的速度向前运动,同时移动
目标定位系统服务器软件开始接收定位识别卡数据,同时通过与移动目标定位系统服务器的usb接口连接的控制单元向计时单元的第一控制模块发出计时信号,第一控制模块控制时钟单元开始计时;定位车每通过一个测试点,激光接收器发出电流信号给计时单元,计时单元的第一控制模块控制时钟停止计时;定位车驶出分站覆盖边界后,控制单元统计所有时钟的时间,与移动目标定位系统服务器记录的接收时间对应,计算在相同时间内固定有定位识别卡的定位车移动距离与计时单元所在位置之差;
27.步骤4、连续测试多次,取多次测试得到的固定有定位识别卡的定位车移动距离与计时单元所在位置之差的最大差值作为移动目标定位能力的动态误差评估值,根据动态误差评估值评价分站和识别卡在并发数为m条件下的移动目标定位能力。
28.采用上述技术方案所产生的有益效果在于:本发明提供的一种煤矿移动目标定位能力测试装置及测试方法,通过激光发射器、接收器、计时单元以及定速行走装置,能够准确对煤矿移动目标定位能力进行自动测试,且测试的精度高。
附图说明
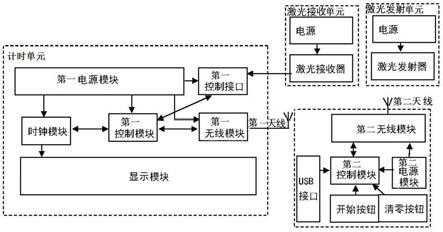
29.图1为本发明实施例提供的一种煤矿移动目标定位能力测试装置的结构框图;
30.图2为本发明实施例提供的定速行走装置的结构示意图;
31.图3为本发明实施例提供的时钟、激光接收器和激光发射器的布置示意图。
32.图中:1、牵引构件;2、定位车;3、定速装置;4、识别卡支架;5、无线接收控制器;6、尾轮;7、减速箱;8、电机。
具体实施方式
33.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
34.本实施例中,一种煤矿移动目标定位能力测试装置,如图1所示,包括计时单元、控制单元、激光发射单元和激光接收单元;
35.所述计时单元包括显示模块、第一电源模块、第一控制模块、第一控制接口、时钟模块、第一无线模块和第一天线组成;
36.其中,第一电源模块与直流供电连接,为计时单元中其他模块提供电源;第一无线模块与第一天线连接;第一控制接口与激光接收器连接;第一无线模块及第一控制接口均与第一控制模块连接;时钟模块与显示模块连接;
37.所述第一电源模块负责将外部12v直流供电转化为5v直流供电;本实施例中,电源模块采用线性稳压电源,具有过流过压过热保护、输出阻抗小、噪声低等优点;
38.所述第一控制接口负责接收激光接收器的信号,通过第一控制模块控制时钟模块;本实施例中,第一控制接口采用高精度线性隔离放大器,抗干扰能力强,延时小,高数据速率传输,隔离耐压5kv;
39.所述第一无线模块负责接收控制单元的信号,通过第一控制模块控制时钟模块;本实施例中,无线模块工作频率为433mhz,采用fsk调制方式,且有抗干扰能力强、距离远、穿透力强、绕射能力强等特点。
40.所述第一控制模块根据第一无线模块和第一控制接口的信号,控制时钟模块,并
fsk调制方式,且有抗干扰能力强、距离远、穿透力强、绕射能力强;电机控制器采用两个液压泵,控制制动装置,使电动能即动即停。遥控器工作频率为450mhz,显示屏显示电机8 运动方向及速度,键盘用于控制定位车2运动方向及速度;
54.本实施例中,一种煤矿移动目标定位能力测试方法,包括以下步骤:
55.步骤1、分别在定位分站附近、分站定位区两边界、分站与定位区两边界中间的位置设置多组时钟单元、激光接收器和激光发射器作为测试点,如图3所示,同时在分站附近设置控制单元及移动目标定位系统服务器;将不小于并发识别数m的待测试的定位识别卡固定在环氧条上,再将环氧条固定到支架上,识别卡支架固定在定位车上,以定位识别卡无遮挡及安全为准;
56.所述移动目标定位系统服务器可以记录识别卡卡号、接收时间、距离、收到每个识别卡定位数据的次数及识别卡总数量,并能通过usb接口向控制单元发出指令;
57.步骤2、测试前,移动目标定位系统服务器将定位识别卡数据清零,同时通过与移动目标定位系统服务器的usb接口连接的控制单元向计时单元发出清零信号,计时单元中的第一控制模块收到清零信号,控制时钟模块中的多组时钟单元清零;
58.步骤3、测试开始,用遥控器控制定速装置,使牵引构件1带动定位车从分站覆盖边界外以定速向前运动,控制单元控制计时单元计时,并统计所有时钟单元的时间,与移动目标定位系统服务器记录的接收时间对应,计算在同时间内的固定有识别卡的定位车行走移动距离与计时单元所在位置之差;
59.固定有识别卡的定位车从分站覆盖边界外以固定的速度向前运动,同时移动目标定位系统服务器软件开始接收识别卡数据,同时通过与移动目标定位系统服务器的usb接口连接的控制单元向计时单元的第一控制模块发出计时信号,第一控制模块控制时钟单元开始计时;定位车每通过一个测试点,激光接收器发出电流信号给计时单元,计时单元的第一控制模块控制时钟停止计时;定位车驶出分站覆盖边界后,控制单元统计所有时钟的时间,与移动目标定位系统服务器记录的接收时间对应,计算在相同时间内固定有定位识别卡的定位车移动距离与计时单元所在位置之差;
60.步骤4、连续测试多次,取多次测试得到的固定有定位识别卡的定位车移动距离与计时单元所在位置之差的最大差值作为移动目标定位能力的动态误差评估值,根据动态误差评估值评价分站和识别卡在并发数为m条件下的移动目标定位能力,动态误差评估值越小,分站和识别卡的移动目标定位能力越强。
61.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明权利要求所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1