星载GNSS-S雷达系统及其舰船目标探测跟踪方法与流程
星载gnss-s雷达系统及其舰船目标探测跟踪方法
技术领域
1.本发明涉及雷达探测跟踪技术领域,尤其涉及一种基于全数字阵列天线的星载gnss-s雷达系统及其舰船目标探测跟踪方法。
背景技术:
2.gnss散射信号探测(global navigation satellite system
–
scatter,gnss-s)雷达利用gnss导航卫星的散射信号对海面舰船目标进行探测,具有信号源丰富、全天时全天候探测、可对抗无线电静默和雷达隐身、载荷功耗低和易于卫星搭载等优势。该技术可与电子侦察、雷达和光学侦察等手段形成互补,提高我军战场感知能力,是海洋侦察与监视的重要手段。近年来,基于gnss-s信号开展海面目标探测成为科学研究的热点。
3.然而,gnss导航卫星离地面高度较高,信号发射功率小,到达地面的信号功率通常在-130dbm左右,经过散射后的卫星信号将会更加微弱,这使得星载gnss-s雷达实现海面舰船目标探测的难度很高。另外,海面舰船通常以舰队的形式多目标同时出现,各个舰船的位置、轨迹各不相同,gnss-s信号受带宽限制使得空间分辨率较低,从而实现多个舰船目标的同时跟踪难度较大。那么,在低轨卫星上实现gnss散射信号的高质量接收,并对海面多舰船目标进行分别跟踪,是开展gnss-s雷达海面目标探测亟待解决的关键技术。
技术实现要素:
4.为克服上述现有技术中存在的缺陷,本发明的目的在于提供一种星载gnss-s雷达系统及其舰船目标探测跟踪方法,能同时实现海面大量舰船目标的搜索探测与跟踪监视。
5.为实现上述发明目的,本发明的技术方案是:
6.本发明提供一种星载gnss-s雷达系统,包括:导航卫星直达信号处理子系统、目标信号检测跟踪子系统、目标轨迹形成子系统和回波信号存储子系统,
7.所述导航卫星直达信号处理子系统用于接收处理导航卫星的直达信号,得到直达信号的伪码和多普勒频移信息;
8.所述目标信号检测跟踪子系统用于接收导航卫星的目标散射信号,扫描搜索目标海域,同时跟踪目标;
9.所述目标轨迹形成子系统用于对目标的速度、位置进行综合处理,得到目标的运动轨迹,并剔除虚假目标;
10.所述回波信号存储子系统用于对目标散射信号的综合处理结果、目标检测结果和目标的运动轨迹进行存储。
11.本发明还提供一种上述星载gnss-s雷达系统的舰船目标探测跟踪方法,包括:
12.生成搜索波束对目标区域进行大范围扫描,接收导航卫星的直达信号和散射信号;
13.综合处理直达信号和散射信号,对综合处理后的结果进行分析计算,对海面目标进行检测,当检测到目标时,跟踪目标,并根据搜索波束的回波信号方位提取目标位置信
息;
14.根据目标位置信息利用数字波束赋形技术生成跟踪波束,形成对准目标的数字波束,并自适应调整跟踪波束的数量、指向和方位,对多个目标进行凝视跟踪;
15.提取目标的运动轨迹信息,并根据运动轨迹信息剔除虚假目标。
16.有益效果:
17.根据本发明的方案,星载gnss-s雷达系统基于全数字阵列天线进行设计,由两幅单频段全数字相控阵天线组成,一幅大口径单频段全数字相控阵天线接收导航卫星的目标散射信号,一幅小口径单频段全数字相控阵天线接收导航卫星的直达信号,并采用波束赋形技术,同步实现gnss-s信号的大范围扫描接收与长时间凝视接收,进而实现海面舰船目标的大范围搜索和长时间跟踪。该星载gnss-s雷达系统结构紧凑,体积小,射频前端可灵活配置,便于低轨卫星搭载。
18.本发明采用多目标自适应跟踪策略,实现大量目标的同时跟踪。当发现多个跟踪目标时,根据目标的动态特性区分为高动态目标和低动态目标,根据目标的运动特性调配跟踪波束,实现多个目标的同时跟踪;并根据目标的多维参数,剔除虚假目标。
附图说明
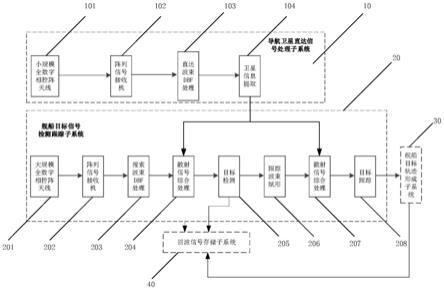
19.图1示意性表示本发明实施例提供的星载gnss-s雷达系统组成框图;
20.图2示意性表示本发明实施例提供的星载gnss-s雷达系统探测的场景图;
21.图3示意性表示本发明实施例提供的星载gnss-s雷达系统中大口径全数字相控阵天线结构图;
22.图4示意性表示本发明实施例提供的星载gnss-s雷达系统中小口径相控阵天线结构图;
23.图5示意性表示本发明实施例提供的星载gnss-s雷达系统中数字阵列接收机框图;
24.图6示意性表示本发明实施例提供的舰船目标探测跟踪方法流程图;
25.图7示意性表示本发明实施例提供的搜索波束指向计算框图;
26.图8示意性表示本发明实施例提供的搜索波束扫描框图;
27.图9示意性表示本发明实施例提供的跟踪波束生成流程图;
28.图10示意性表示本发明实施例提供的多舰船目标跟踪流程图。
具体实施方式
29.为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
30.下面结合附图和具体实施方式对本发明作详细地描述,实施方式不能在此一一赘述,但本发明的实施方式并不因此限定于以下实施方式。
31.在本发明的一个实施例中,提供了一种基于全数字阵列天线的星载gnss-s雷达系统及其舰船目标探测跟踪方法。
32.参照图1,该星载gnss-s雷达系统包括:导航卫星直达信号处理子系统10、目标信号检测跟踪子系统20、目标轨迹形成子系统30和回波信号存储子系统40。导航卫星直达信号处理子系统10,用于接收处理导航卫星的直达信号,得到直达信号的伪码和多普勒频移等信息。目标信号检测跟踪子系统20,用于接收导航卫星的舰船目标散射信号(即gnss-s信号),采用大口径全数字相控阵天线,形成搜索波束对目标海域进行大范围的扫描搜索,同时形成跟踪波束对准舰船目标,并随舰船目标移动进行锁定跟踪。目标轨迹形成子系统30,用于对发现的舰船目标的速度、位置进行综合处理,得到舰船目标的运动轨迹,并剔除虚假目标。回波信号存储子系统40,用于对目标散射信号的综合处理结果、目标检测结果以及舰船目标轨迹进行存储。
33.参照图1,导航卫星直达信号处理子系统10包括:小口径(小规模)全数字相控阵天线101,用于接收导航卫星的直达信号;第一阵列信号接收机102,用于对接收到的阵列直达信号进行处理,进行放大、滤波、变频及adc采样处理;直达波束dbf处理模块103,根据自身位置与导航卫星位置信息,通过数字波束赋形技术生成指向导航卫星的接收波束;卫星信息提取模块104,对当前可见的导航卫星电文进行解码,得到卫星的载波多普勒、伪码相位等信息。
34.参照图1,目标信号检测跟踪子系统20包括:大口径(大规模)全数字相控阵天线201,用于形成gnss散射信号的搜索波束和跟踪波束,接收海面目标散射的导航信号;第二阵列信号接收机202,用于接收m
×
n路相控阵天线接收到的gnss-s信号,并对信号进行放大、滤波、变频及adc转换;搜索波束dbf处理模块203,采用数字波束dbf技术,生成搜索波束,并在低轨卫星飞行轨迹的垂直方向快速往返扫描,搜索海面舰船目标;第一散射信号综合处理模块204,用于对散射信号与直达信号子系统10输出的卫星信息进行综合处理,分析散射信号与直达信号在多普勒频移、码相位及信号能量等方面的不同特性,得到舰船目标特征信息;目标检测模块205,接收散射信号综合处理输出的直达与散射信号处理结果,解算舰船目标的位置信息;跟踪波束赋形模块206,根据目标探测205得到的目标位置信息,形成分别指向目标的多个跟踪波束;第二散射信号综合处理模块207,根据直达信号处理子系统和跟踪波束接收的目标散射信号,进行综合信息处理,得到更加精确的目标位置信息;目标跟踪模块208,实时调整指向目标的跟踪波束位置,使跟踪波束始终对准目标。
35.参照图2,星载gnss-s雷达搭载在低轨卫星上,在近地轨道随卫星做高速运动。飞行过程中,对星下点轨迹附近海面区域的舰船目标进行探测。大口径全数字相控阵天线采用dbf技术,产生搜索波束,对星下点附近的海面区域进行快速往返扫描,同时扫描区随卫星的移动向前推进。导航卫星信号到达海面遇到舰船目标后形成后向散射,散射的gnss导航信号被搜索波束捕捉到后,经舰船目标信号检测跟踪子系统处理,并与导航卫星直达信号处理子系统的信息综合处理,得到舰船目标的特征信息。然后,大口径全数字相控阵天线产生跟踪波束,对发现的海面舰船目标进行凝视,并随舰船目标的移动实时调整跟踪波束指向,保持对舰船目标的跟踪。
36.参照图3,大口径全数字相控阵天线201,由m行
×
n列行的微带天线阵元2011组成,其方位向和距离向分别由m行阵元和n列阵元的微带天线组成。每个微带天线单元2011采用相同的设计,工作频段采用导航卫星单频段信号(如1.575ghz)。相控阵天线采用全数字化设计,阵元输出的m
×
n路射频信号输出并进行数字化及dbf处理,对射频采样后,形成数字
化采样信息,对信号进行捕获跟踪处理,并控制数字波束形成。
37.参照图4,小口径全数字相控阵天线101,由p行
×
q列的微带天线阵元组成,并采用和微带天线阵元2011相同的微带天线。阵列规模较小,每路阵元输出的射频信号输出并进行数字化及dbf处理,对射频adc采样后,对信号进行捕获跟踪处理,并控制数字波束形成。
38.参照图5,阵列信号接收机202,由射频信号预处理2021和adc模块2022组成。阵列信号预处理对m
×
n路阵列信号分别进行放大滤波及变频处理,形成单频高增益的信号,经adc模块转换为数字信号。
39.本实施例中,示例性地给出上述星载gnss-s雷达系统实现的舰船目标探测跟踪方法,包括:生成搜索波束对目标区域进行大范围扫描,接收导航卫星的直达信号和散射信号;综合处理直达信号和散射信号,对综合处理后的结果进行分析计算,对海面目标进行检测,当检测到目标时,跟踪目标,并根据搜索波束的回波信号方位提取目标位置信息;根据目标位置信息利用数字波束赋形技术生成跟踪波束,形成对准目标的数字波束,并自适应调整跟踪波束的数量、指向和方位,对多个目标进行凝视跟踪;提取目标的运动轨迹信息,并根据运动轨迹信息剔除虚假目标。通过星载gnss-s雷达系统的大口径全数字相控阵天线,形成搜索波束在低轨卫星飞行轨迹星下点附近进行往返扫描,实现大范围海面目标的探测;发现海面舰船目标后,再通过在轨天线实时数字波束赋形技术,衍生出跟踪波束,对准舰船目标实现舰船的高精度跟踪监视;当海面舰船目标大于最大跟踪波束数量时,通过智能优化策略,实现全部大量海面目标的跟踪监视。
40.参照图6,为gnss-s舰船目标探测跟踪方法流程图,分为目标搜索、目标鉴别及目标跟踪三个子流程。流程开始,首先进行目标搜索,生成搜索波束对目标区域进行扫描100,然后接收直达子系统导航卫星信息101,融合处理直达与散射信号102根据散射信号与直达信号进行综合处理,对海面目标进行检测;是否发现舰船目标103,对融合处理后的结果进行分析计算,判断目标海域是否有舰船目标;如果发现目标则开始目标跟踪子流程;计算舰船目标位置104,根据搜索波束发现的回波信号方位得到目标的位置;跟踪波束赋形105,根据目标位置信息生成跟踪波束,形成对准目标的数字波束;舰船目标智能跟踪106,自适应调整跟踪波束的数量、指向和方位,保持对发现的全部海面舰船目标的持续跟踪。
41.参照图7,探测过程中由导航卫星直达子系统得到导航卫星的位置(xs,ys,zs),收到四颗以上导航卫星后可计算得到低轨卫星gnss-s雷达自身位置(xu,yu,zu)。目标搜索区域的坐标为(xd,yd,zd),根据几何关系计算扫描波束的指向方位信息,
42.目标斜距r为:
[0043][0044]
俯仰角θ为:
[0045][0046]
方位角φ为:
[0047][0048]
参照图8,在生成搜索波束后,大口径全数字相控阵天线通过数字波束赋形技术,
搜素波束保持波束角α不变,在低轨卫星星下点轨迹一侧的方位上做左右扫描,实现大范围海面区域的探测搜索,搜索到第i个目标后记下此时搜索波束的方位信息(ri,θi,φi)。
[0049]
参照图9,搜索到舰船目标后,进入跟踪流程,以(ri,θi,φi)作为初始方位生成跟踪波束,接收舰船目标的散射信号,生成目标的轨迹,通过目标轨迹得到目标连续跟踪时间t,目标运动速度v,以及目标一维像能量值e等信息,根据预先设定的真实目标持续时间阀值tvalve,真实目标速度极限阀值vvalve,一维像能量阀值evalve,并按照以下公式(4)对目标进行判断,鉴别是否虚假目标,如果判定为虚假目标则停止跟踪,如果是真实目标则精细调整波束方位指向,进一步在该区域附近对舰船目标做精细化跟踪,并保持跟踪波束始终对准舰船目标。
[0050][0051]
参照图10,当发现多个跟踪目标时,根据多个目标的移动速度进行排序,区分为高动态目标和低动态目标;当目标数量u小于相控阵天线最大跟踪波束数量w时,每个目标采用一个波束持续跟踪;当目标数量u大于w时,由w/2个跟踪波束固定跟踪移动速度大的w/2个高动态目标,另w/2个跟踪波束对(u-w/2)个低动态目标进行轮流跟踪。
[0052]
本发明的基于全数字阵列天线的星载gnss-s雷达及其舰船目标探测跟踪方法,采用一幅单频段全数字化相控阵接收天线对导航卫星的散射信号进行接收,利用另一幅小口径单频段全数字相控阵天线对导航卫星的直达信号进行接收,对导航卫星的直达信号与散射信号进行综合处理,实现大范围海面舰船目标的搜索探测,提取舰船目标的位置信息。利用波束赋形技术对单频段全数字化相控阵天线的波束形状进行形成和优化,形成多个虚拟数字波束对多个舰船目标进行凝视,实现舰船目标的跟踪,并提取舰船目标的运动轨迹信息,并根据运动轨迹信息剔除虚假目标。相比于传统星载雷达系统,该星载gnss-s雷达的探测跟踪方法不需要主动发射信号,能同时实现海面舰船多目标的搜索探测与跟踪监视,具有功耗低、自身隐蔽性强等优势。
[0053]
以上所述仅为本发明的一个实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1