一种洛伦兹力磁轴承轴向磁密均匀性误差补偿方法
1.本发明涉及一种洛伦兹力磁轴承轴向磁密均匀性误差补偿方法,适用于采用通过洛伦兹力磁轴承控制转子径向偏转两自由度的转子式陀螺作为航天器姿态角运动信息测量的场合。
技术背景
2.洛伦兹力磁轴承用来控制陀螺转子径向偏转两自由度,理想情况下其对转子输出的力矩和线圈内电流大小成正比,故具有高精度、高动态、快响应等优点。该轴承因为具有较高的控制精度,所以在磁悬浮陀螺转子偏转控制和卫星平台控制等领域具有较高的应用价值。磁悬浮控制敏感陀螺是由航天工程大学2015年首次提出的一种新概念陀螺仪,该陀螺通过检测洛伦兹力磁轴承中线圈电流可以实现陀螺角速率测量,进而实现输出力矩和角速率测量一体化集成。为了提高磁悬浮控制敏感陀螺的角速率测量精度,首先需要考虑的就是如何提高洛伦兹力磁轴承线圈中电流的检测精度。洛伦兹力磁轴承线圈工作气隙处的轴向磁密均匀性是影响电流检测精度的主要因素,无论陀螺是否输出力矩转子均存在偏转角运动,该角运动均会导致线圈与磁场发生轴向运动,进而使得线圈内因磁通量发生变化而产生感应电流,从而降低了陀螺角速率测量精度。
3.如何降低洛伦兹力磁轴承磁密均匀性对陀螺角速率测量精度的影响,是当前一个亟待解决的问题。目前主要途径是通过改善洛伦兹力磁轴承的磁路结构以提高磁密均匀性。这种思路会在一定程度上提高陀螺角速率测量精度,但是由于加工和装配等误差,磁密均匀性提高程度有限,不能从根本上解决磁密均匀性误差对陀螺角速率测量精度的影响。
技术实现要素:
4.本发明的技术解决问题是:针对由洛伦兹力磁轴承控制转子径向偏转两自由度的转子式陀螺角速率测量精度问题,在考虑转子主动偏转和存在扰动的条件下,提出一种洛伦兹力磁轴承轴向磁密均匀性误差补偿方法。该方法的测量精度仅取决于转子径向偏转位移传感器的测量精度,并不随着转子扰动和主动偏转范围变大而降低。该方法有效缓解了现有方法中姿态角速率测量精度与输出力矩控制精度之间的矛盾,大幅提高了航天器角速率在转子存在偏转扰动时的测量精度,为转子式陀螺实现航天器姿态控制和姿态测量一体化奠定了基础。
5.本发明的技术解决方案:
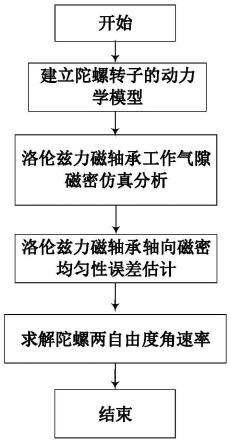
6.通过对仿真分析的轴向磁密分布情况进行正弦拟合,实现洛伦兹力磁轴承工作气隙轴向磁密均匀性误差补偿,可以高精度地测量陀螺两自由度角速率,具体包括以下步骤:
7.(1)建立陀螺转子的动力学模型
8.陀螺转子的径向力矩m
x
,my可表示为
[0009][0010]
其中,分别代表陀螺定子坐标系相对惯性空间的角速率;分别代表陀螺定子坐标系相对惯性空间的角速率;分别代表定子坐标系oxfyfzf中oxf,oyf轴相对惯性空间的角加速度;jr,jz分别代表陀螺转子径向和轴向的转动惯量;ω代表陀螺转子旋转角速度;分别代表陀螺转子绕定子坐标系oxfyfzf中oxf,oyf轴的偏转角速度;分别代表陀螺转子绕定子坐标系oxfyfzf中oxf,oyf轴的偏转角加速度;i
α
,i
β
分别代表陀螺洛伦兹力磁轴承线圈驱动转子绕oxf,oyf轴的偏转电流;ki代表洛伦兹力磁轴承的力矩系数;
[0011]
(2)洛伦兹力磁轴承轴向磁密均匀性误差估计
[0012][0013]
其中,i
cα
,i
cβ
分别代表定子坐标系oxfyfzf中oxf,oyf轴的轴向磁密均匀性误差补偿电流大小;n代表单个洛伦兹力磁轴承线圈匝数;r代表单个洛伦兹力磁轴承线圈电阻;l代表单个洛伦兹力磁轴承线圈跨度;lm代表洛伦兹力磁轴承定子半径;α,β分别代表陀螺转子绕定子坐标系oxfyfzf中oxf,oyf轴的偏转角;函数b(z)代表洛伦兹力磁轴承线圈相对于转子的轴向位移z与线圈所处磁密大小的关系式;
[0014]
(3)求解陀螺角速率
[0015][0016]
对于采用洛伦兹力磁轴承控制转子径向偏转两自由度的转子式陀螺而言,磁钢安装在转子上,线圈安装在洛伦兹力磁轴承定子上。当陀螺不对外输出力矩时,转子由于不平衡等实际因素在径向偏转两自由度上会存在扰动;当陀螺对外输出力矩时,转子在径向偏转两自由度上进行主动偏转。转子无论是在偏转两自由度存在扰动还是主动偏转,均会使得磁钢相对于线圈发生轴向运动,进而导致线圈会因磁通量发生变化而产生感应电流。感应电流的产生会导致(1)式中的i
α
和i
β
与线圈内实际电流大小存在差值,通过仿真分析洛伦兹力磁轴承线圈工作气隙处的磁密分布,结合法拉第电磁感应定律,进而可以对感应电流进行定量分析,实现洛伦兹力磁轴承轴向磁密均匀性误差补偿,最终达到提高陀螺角速率测量精度。
[0017]
因此,该方法的测量精度仅取决于转子径向偏转位移传感器的测量精度,而与转子扰动和主动偏转范围大小无关,能大幅提高陀螺在主动输出力矩情况下的角速率测量精
度。
[0018]
本发明的发明原理是:利用磁悬浮控制敏感陀螺径向所受合外力矩关系式得到陀螺两轴角速率和转子位移、力矩器电流等参数的解析关系;通过mechanical apdl仿真软件得到洛伦兹力磁轴承线圈工作气隙处的磁密轴向分布情况;对磁密轴向分布情况进行正弦拟合得到轴向磁密与轴向位置的关系函数,进而推导出转子偏转角运动与线圈磁通量的对应关系;根据法拉第电磁感应定律,建立转子偏转角运动与线圈感应电流模型,从而实现基于洛伦兹力磁轴承轴向磁密均匀性误差补偿的高精度陀螺角速率测量。
[0019]
由于该方法考虑了转子主动偏转和存在偏转扰动时带来的感应电流误差,其测量精度仅取决于转子径向偏转位移传感器的测量精度,陀螺角速率测量精度并不随着转子扰动和主动偏转范围变大而降低。始终保持在较高水平。
[0020]
本发明的方案与现有方案比,主要优点在于:姿态角速率的测量精度并不会随着转子偏转幅度的增大而降低,有效缓解了现有方法中姿态角速率测量精度与输出力矩控制精度之间的矛盾。
附图说明
[0021]
图1具体实施方案图;
[0022]
图2磁悬浮控制敏感陀螺结构图;
[0023]
图3洛伦兹力磁轴承线圈工作气隙处磁仿真图;
[0024]
图4因轴向磁密均匀性误差产生的感应电流仿真对比图;
[0025]
图5经磁密补偿前后的陀螺角速率测量精度仿真对比图。
具体实施方案
[0026]
本发明的具体实施方案如图1所示,具体实施步骤如下:
[0027]
(1)建立陀螺转子的动力学模型
[0028]
如图2为磁悬浮控制敏感陀螺的结构示意图,转子轴向平动自由度和径向平动两自由度通过轴向磁轴承和径向磁轴承控制,电机驱动转子高速旋转,洛伦兹力磁轴承用于控制转子径向偏转两自由度。由于洛伦兹力磁轴承输出力矩与电流称线性关系,通过检测其线圈内控制电流大小即可解算出陀螺角速率。
[0029]
陀螺转子的径向输出力矩m
x
,my可表示为:
[0030][0031]
其中,分别代表陀螺定子坐标系相对惯性空间的角速率;分别代表陀螺定子坐标系相对惯性空间的角速率;分别代表定子坐标系oxfyfzf中oxf,oyf轴相对惯性空间的角加速度;jr,jz分别代表陀螺转子径向和轴向的转动惯量;ω代表陀螺转子旋转角速度;分别代表陀螺转子绕定子坐标系oxfyfzf中oxf,oyf轴的偏转角速度;分别代表陀螺转子绕定子坐标系oxfyfzf中oxf,
oyf轴的偏转角加速度;i
α
,i
β
分别代表陀螺洛伦兹力磁轴承线圈驱动转子绕oxf,oyf轴的偏转电流;ki代表洛伦兹力磁轴承的力矩系数;
[0032]
(2)洛伦兹力磁轴承工作气隙磁密仿真分析
[0033]
通过apdl仿真软件建立洛伦兹力磁轴承模型,仿真得到线圈工作气隙处轴向磁密分布情况,如图3所示,其中图3(a)为线圈工作气隙截面的二维磁密分布示意图,图3(b)为转子在径向平衡位置时线圈工作气隙处轴向磁密分布示意图。
[0034]
(3)洛伦兹力磁轴承轴向磁密均匀性误差估计
[0035]
对图3(b)中的轴向磁密分布情况进行正弦拟合,得到轴向位置与磁密大小的关系式,可表示为:
[0036]
b(z)=0.542*sin(201.6*z-2.605)-0.0242*sin(587.5*z-4.495)
ꢀꢀꢀꢀꢀꢀꢀ
(5)
[0037]
其中,z代表线圈所处轴向位置,b(z)代表轴向位置为z时的磁密大小。根据法拉第电磁感应定律,结合(3)式,得到转子偏转角和偏转角速度与洛伦兹力磁轴承线圈中产生的感应电流关系式为:
[0038][0039]
其中,i
cα
,i
cβ
分别代表定子坐标系oxfyfzf中oxf,oyf轴的线圈中因轴向磁密均匀性误差产生的感应电流大小;n代表单个洛伦兹力磁轴承线圈匝数;r代表单个洛伦兹力磁轴承线圈电阻;l代表单个洛伦兹力磁轴承线圈跨度;lm代表洛伦兹力磁轴承定子半径;α,β分别代表陀螺转子绕定子坐标系oxfyfzf中oxf,oyf轴的偏转角;
[0040]
(4)求解陀螺两轴角速率
[0041]
为了求解陀螺两轴角速率和根据(4)式首先定义陀螺敏感力矩变量m
xs
和m
ys
如下
[0042][0043]
对(7)式中的两个方程进行相加减得到两个新的变量m
as
和m
bs
[0044][0045]
当陀螺正常工作时,jzω>>jr,故忽略(8)式中的jr项。最终结合(6)、(7)和(8)式得到经过磁密补偿后的陀螺两轴角速率表达式为
[0046]
[0047]
为了验证该方法推导的感应电流计算方法的正确性,依据solidworks软件建立陀螺转子和洛伦兹力磁轴承模型,将该模型导入到ansys electronics desktop仿真程序中,将转子偏转角度设为0.3
°
,转速设为5000r/min,运行后得到如图4(a)所示的感应电流;将此条件下的转子偏转角和偏转角速度带入到(6)式得到的如图4(b)所示的感应电流;将图4(a)和图4(b)中的感应电流做差,得到如图4(c)所示的感应电流,即为该方法的计算误差。经计算该方法对感应电流的估计精度可达96%,从而验证了该方法对磁密均匀性误差产生感应电流的计算方法的正确性。
[0048]
为了验证该方法的有效性,对磁密补偿前后的陀螺角速率计算结果进行对比。基于simulink建立了陀螺单机仿真模型,陀螺额定转速为5000r/min(约83.3hz),转子最大偏转角为
±
0.3
°
(约
±
5.24
×
10-3
rad),设转子偏转仿真幅值为5
×
10-4
rad,频率为83.3hz,陀螺载体角速率设为地球转速约为7.27
×
10-5
rad/s。仿真结果如图5所示,图5(a)表示补偿前的陀螺角速率计算结果,图5(b)表示补偿后的陀螺角速率计算结果。经计算,磁密补偿前角速率计算结果的标准差为1.1
×
10-3
rad/s,磁密补偿后角速率计算结果的标准差为9.21
×
10-4
rad/s,故经磁密补偿后,陀螺角速率测量精度可提高约16.3%。因此,该方法很好地缓解了陀螺角速率测量精度与输出力矩控制精度的矛盾。
[0049]
本发明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1