用于锚固滑坡锚杆的光纤形变解算方法和滑坡预警系统
1.本发明属于地质灾害防治技术领域,尤其涉及一种锚固滑坡锚杆的光纤形变解算方法、滑坡预警方法及系统。
背景技术:
2.滑坡的发生要经历蠕滑、滑动和剧滑三个阶段,三个阶段的变形特征各不相同,表现出滑坡的地表位移、速率、裂缝分布和各种伴生现象各不相同。根据滑坡发育不同阶段特点,采用有针对性的防护和监测方法是实现滑坡地质灾害预警的关键,目前国内外对于滑坡体监测的主要方法有大地测量法、全球定位系统(gps)法、水准测量法、标桩、直尺或裂缝计、测斜仪、钻孔位移计、锚索测力计等。
3.针对高陡边坡的形变监测方法主要有大地测量、gps测量、预应力锚索监测等。大地测量法利用高精度光学和光电测量仪器对角度和距离进行测量,实现对边坡的人工监测。该方法周期长、工作量大,对地形通视条件和天气状况的要求较高,难以对边坡变形进行实时连续的监测。gps测量法利用卫星技术对边坡地貌地形进行监测,利用多颗gps卫星对此监测点发送的定位信号、确定监测点的三维坐标,测量精度可达到毫米级,可全天候进行测量。但是gps接收机成本较高,在我省高山群山地域,卫星信号传输效果较差,强度较弱,测量结果不稳定。此外,gps测量对天气的依赖较大,恶劣天气下效果不佳,而滑坡一般都发生在恶劣天气下,限制了其在滑坡监测中的应用。采用预应力锚杆固定边坡或可能崩塌的岩体,能提供足够的抗滑力,并能提高潜在滑移面上的抗剪强度,是目前有效地阻止边坡位移、预防岩体崩塌、确保边坡长期稳定所采用的主要方法。
4.同时,通过在预应力锚杆内集成传感器,实时连续监测其工作性能状态、预应力损失情况、位移变形及其发展情况,能够还原高陡边坡形变,有效实现高陡边坡的滑坡预警。预应力锚杆的安装通常是采用钻孔的方式,按照设计好的方向和深度钻孔,并将锚杆或锚索下入到孔底,然后灌注混凝土浆料形成锚固段,最后制作锚墩和锚头,通过预张紧后将需要稳定的边坡或岩体锚固到稳定的基体上。
5.当前在预应力锚杆内集成的主要是电子传感器,其测量精度和灵敏度受限,测量误差大,无法同时反应预应力锚杆内各处的形变分布,且该类传感器容易受到磁场的影响,在遇到雷雨天气时,仪器容易受到干扰,会导致监测结果不准确或无法工作。
6.为解决上述问题,申请号为cn 108007619 a的专利提出了一种利用光纤光栅测量锚杆侧向受力的方法,利用包括锚杆、锚杆锚固剂、光纤光栅、垫板、光缆、锚杆锁紧装置、光缆、解调仪构成的测量锚杆,并利用光纤光栅对所述测量锚杆的侧向受力进行测量。采用光纤光栅测得了锚杆所受切向力的大小方向位置,解决了现有测力锚杆仅能测量锚杆所受轴向力,提高了受力锚杆测量精度的可靠性。但该方法不能还原锚杆在地质中的实时形状,不能对滑坡体进行直观的实时状态监测,做到滑坡预警。
技术实现要素:
7.本发明的目的在于提供一种用于锚固滑坡锚杆的光纤形变解算方法和滑坡预警系统,可实现对锚杆三维形状变化和高危滑坡带的长期监测和预警,可广泛用于地质灾害防治技术领域。
8.本发明第一方面提供了一种用于锚固滑坡锚杆的光纤形变解算方法,包括:
9.利用光纤光栅感知解耦锚固滑坡的锚杆形状变化;
10.对所述光纤光栅产生的波长变化进行解调;
11.基于所述解调到的波长,求取波长差后进行曲率转换;
12.基于所述曲率转换结果,沿锚杆长度方向进行曲率插值;
13.基于插值后的曲率进行光纤形状还原,然后对光纤进行坐标拟合,依据实际锚杆初始坐标进行坐标融合,最终得到锚杆的三维形状变化。
14.所述光纤光栅为多芯光纤光栅阵列。
15.本发明第二方面提供了一种滑坡预警系统,包括:智能锚杆组,传输光纤,多通道光纤光栅解调仪,多通道光纤光栅解调仪控制系统,智能锚杆数据处理存储中心,滑坡预警管理系统。智能锚杆中含有多组光纤光栅,感知智能锚杆的形状变化,采用多个智能锚杆组成高危滑坡带的智能锚杆组。光纤光栅反射的信号通过传输光纤,被多通道光纤光栅解调仪控制系统控制下的多通道光纤光栅解调仪解调,解调得到的数据通过多通道光纤光栅解调仪控制系统发送至智能锚杆数据处理存储中心,通过锚杆的光纤形变解算方法解算得到智能锚杆组的三维形状变化,然后还原高危滑坡带实时状态,依据滑坡预报算法对滑坡实时状态进行分析,最终在滑坡预警管理系统实现高危滑坡带的历史状态回溯、滑坡预测和报警。
16.本发明的有益效果在于:
17.本发明能够还原锚杆在地质中的实时形状,还能对滑坡体进行直观的实时状态监测,做到滑坡实时预警,可实现对锚杆三维形状变化和高危滑坡带的长期监测和预警,提高滑坡监测预警直观性、稳定性、可靠性和预报精度,提升滑坡预警的响应速度和自动化程度,回溯滑坡历史状态。
附图说明
18.图1是智能锚杆传感光纤截面示意图。
19.图2是多芯光纤光栅弯曲传感器弯曲示意图。
20.图3是螺旋光纤扭转示意图。
21.图4是在微元中光纤应变坐标关系示意图。
22.图5是滑坡预警系统构成图。
23.图6是滑坡预警系统框图。
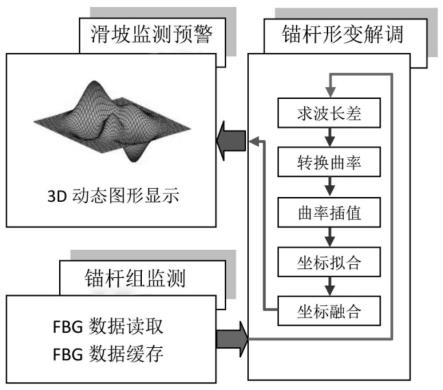
24.图7是通道光纤光栅解调仪控制系统工作流程图。
25.图8是滑坡预警系统预警流程图。
26.图中:
27.智能锚杆组1,传输光纤2,多通道光纤光栅解调仪3,多通道光纤光栅解调仪控制系统4,智能锚杆数据处理存储中心5,滑坡预警管理系统6,滑坡带7,基岩8。
具体实施方式
28.下面结合附图以及具体实施例来进一步阐述本发明,但本发明的保护范围并不限于此。
29.锚固滑坡锚杆的光纤形变解算方法适用于集成传感光纤的锚杆,该传感光纤是一根多芯光纤,例如三芯光纤(图1(a))、四芯光纤(图1(b))、七芯光纤(图1(c))。以图1(b)所示的四芯光纤作为传感光纤对锚固滑坡锚杆的光纤形变解算方法和滑坡预警系统进行进一步阐述。
30.在锚固滑坡锚杆中集成传感光纤,锚杆的实时形状能实时反映滑坡体状态,通过对锚杆实时形状进行解调,能对滑坡体状态进行预警。锚杆中的集成的传感光纤能够实时反应锚杆的形状,利用传感光纤中的光纤光栅感知解耦锚固滑坡的锚杆形状变化。
31.光纤光栅是通过改变光纤芯区折射率,产生小的周期性调制而形成的。由于周期性的折射率扰动仅会对很窄的一小段光谱产生影响,因此,宽带光波在光栅中传播时,入射光能在相应的频率上被反射回来,其余的透射光则不受影响。这样。光纤光栅就起到了光波选择反射镜的作用。反射中心波长λb由下式确定:
32.λb=2n
eff
λ
33.式中,λ为光栅周期,n
eff
为光栅区的有效折射率。
34.根据光弹理论,轴向应变和温度引起的波长变化为:
[0035][0036]
式中:ε为外加应变,p
i,j
为光弹性张量的普克尔压电系数,ν为泊松比,α为光纤材料的热膨胀系数;
△
t为温度变化量。
[0037]
光纤光栅中心波长受外界信号调制产生偏移,解调出波长变化
△
λb便可得到被测量,即对所述光纤光栅产生的波长变化进行解调。在不考虑温度变化时,上式可简化为:
[0038][0039]
这里,p=n
eff
[p
12-ν(p
11
+p
12
)]/2为光纤的有效弹光系数。
[0040]
在纯弯曲条件下,对于圆截面弹性梁,轴向应变和曲率之间存在以下关系:
[0041][0042]
在上式中,ε为光纤光栅传感器感测位置承受轴向表面线应变值,ρ为传感器感测位置的曲率半径,c为对应的曲率,d为传感器到中性面的距离。在给定d、c的情况下,能够求出光纤光栅的应变。从公式中可看出,应变与光纤光栅的中心波长偏移
△
λb成正比,所以曲率c与
△
λb成正比。这样,通过监视光纤光栅传感器中心波长偏移
△
λb的大小就可以得到光纤曲率c的变化情况。
[0043]
图2所示的fbg弯曲传感器,该传感器主要通过在多芯光纤上刻写布拉格光栅阵列而成。图2(a)中所示的四芯光纤主要由一个位于包层中心的中央纤芯和三个以正三角形的形式排列的纤芯组成。当光纤沿着nn'轴作曲率半径为ρ的弯曲时如图2(b)所示,由图2(a)中的几何关系可以得到纤芯i到中性面的距离:
[0044]di
=risin(θ
b-π/2-θi)
[0045]
由上式得,就可分别得到纤芯i上的光栅中心波长偏移与曲率半径的关系:
[0046][0047]
在实际光栅弯曲传感系统中,光栅中心波长偏移
△
λi/λi可以通过数据得到,即基于前述解调到的波长,求取波长差。这样,式中仅有三个未知量ρ、θb和θi(这里,根据四芯光纤纤芯排布,θ1、θ2和θ3存在固定的位置关系),所以联立三个纤芯对应的光栅中心波长偏移方程得到:
[0048][0049]
以及有θ1、θ2和θ3存在固定的位置关系:
[0050][0051]
通过联立三个纤芯对应的光栅中心波长偏移方程和θ1、θ2和θ3固定的位置关系就可求解出ρ、θb、θ1、θ2和θ3。即为求取波长差后进行曲率转换。因此,如果沿着光纤布置若干个fbg传感阵列,对每个fbg曲率转换结果,沿光纤方向(即锚杆长度方向)进行曲率插值,基于插值后的曲率进行光纤形状还原,就可以重构整个光纤的三维形态变化。然后对光纤进行坐标拟合,依据实际锚杆初始坐标进行坐标融合,最终得到锚杆的三维形状变化。
[0052]
对于复杂形态重构,除了弯曲,还要包括扭转,图3给出了节距为l
p
,螺旋芯距离光纤中心为r的螺旋芯光纤在外加扭转下发生θ
t
的扭转角。从图中可看出,螺旋纤芯的长度由l变为l
ε
,因此根据图中的几何关系,可以得到螺旋纤芯轴向应变ε与单位节距上的扭转角θ
t
之间的关系:
[0053][0054]
可得到螺旋纤芯上的光栅中心波长偏移与扭转角θ
t
的关系:
[0055][0056]
一般情况下,影响光纤fbg扭转传感灵敏度的主要因素为螺距与纤芯到光纤中央的距离之比l
p
/r。对于图3所示的四芯螺旋光纤,由于三个螺旋纤芯到光纤中央的距离都相等,因此这里只用考察光纤扭转螺距l
p
对扭转传感灵敏度的影响,而中央纤芯对扭转不灵敏,仅起着补偿温度或光纤纵向拉伸的作用。对于同轴度良好的螺旋芯光纤,由于三个螺旋纤芯的螺距l
p
相同,若三个纤芯的有效弹光系数p相同,那么三个纤芯上的fbg对光纤扭转
的响应是一致的,也就是说光纤扭转引起三个纤芯上fbg的中心波长偏移是相同的。对于非扭转多芯光纤,纤芯的螺距l
p
可以看成无穷大,此时该光纤对扭转传感的灵敏度趋近于零。
[0057]
根据获得的曲率值和扭曲值,采用曲率插值的方式,采用线性插值、二次插值、b样条插值等方法来实现对离散的曲率值和扭曲值数据的连续化,得到光纤曲率和扭转的连续变化函数,这里用κ(s)和τ(s)分别代表光纤曲率和扭转的连续变化函数。
[0058]
而光纤曲率和扭转的连续变化函数κ(s)和τ(s)可通过下述方法确定。根据四个纤芯的几何关系,如图1所示。纤芯上fbg的应变和光纤曲率的关系如下式给出:
[0059][0060]
纤芯i的局部曲率为
[0061][0062]
式中εi为第i个光栅的应变值,由下式给出
[0063][0064]
每个纤芯的局部曲率矢量的大小都依赖于其测量的应变和距离光纤中心的径向距离,而矢量方向取决于纤芯的角度偏移。对于4个纤芯的多芯光纤,曲率向量的矢量被定义为
[0065][0066]
弯曲方向被定义为
[0067][0068]
对于离散的曲率和弯曲方向采用插值法对整条光纤的曲率和弯曲方向进行插值,而挠率函数是长度对弯曲方向的微分
[0069]
τ(s)=θ
′
(s)
[0070]
一旦确定了光纤曲率和扭转的连续变化函数κ(s)和τ(s),进而就可以来重构整个光纤的三维空间位置函数其中其中为e3空间正交基底,为了便于分析这里采用向量值函数表示,下面将简要地分析这一函数的重构过程。
[0071]
如图4所示,定义沿着光纤弯曲方向的单位切向量根据单位切向量对弧长求导定义出曲率向量用曲率向量定义沿着光纤弯曲方向的单位法向量依据单位切向量和单位法向量作外积,得到单位副法向量这样得到了一个沿着光纤的正交标架。
[0072]
依据微分几何中的弗朗内—塞雷(frenet-serret)公式:
[0073]
[0074]
根据单位切向量单位法向量和单位副法向量的定义,我们得到它们的积分形式:
[0075][0076]
一旦标定好各项参数,确定初始位置(即和已知),联立以上两个公式就即可求解得到单位切向量,对切向量积分可以求出光纤的空间位置函数,重构光纤形变轮廓:
[0077][0078]
以曲线的方程为曲率为a(a恒大于零)和挠率恒为零为例,实现这一重构过程。
[0079]
建立微分方程组
[0080][0081]
由曲线的三个基本向量且由对等式两边关于s求导,为了便于表述,将对s求1次导记为对s求2次导记为并应用公式,有:
[0082][0083]
同时,令将其带入则得到
[0084][0085]
我们给定s=0时的初值,则有下面的式子成立:
[0086]
x
″
(s)+a2x(s)=0
[0087]
取一组简单的特解,对y(s)取y(s)=c2sinas,令c2=1有y(s)=sinas,同理对z(s)
取z(s)=0即得到特解是
[0088][0089]
对弧长s积分,得到
[0090][0091]
进一步,解得
[0092][0093]
实现了曲率为a(a恒大于零)和挠率恒为零为例的光纤重构过程,然后对光纤进行坐标拟合,依据实际锚杆初始坐标进行坐标融合,最终得到锚杆的三维形状变化。
[0094]
实施例二提供了一种滑坡预警系统:
[0095]
一种滑坡预警系统,如图5所示,包括:智能锚杆组1,传输光纤2,多通道光纤光栅解调仪3,多通道光纤光栅解调仪控制系统4,智能锚杆数据处理存储中心5,滑坡预警管理系统6。智能锚杆将滑坡体7锚固在基岩8上,中含有多组光纤光栅,感知智能锚杆的形状变化,采用多个智能锚杆组成高危滑坡带的智能锚杆组1。光纤光栅反射的信号通过传输光纤2,被多通道光纤光栅解调仪控制系统4控制下的多通道光纤光栅解调仪3解调,解调得到的数据通过多通道光纤光栅解调仪控制系统发送至智能锚杆数据处理存储中心5,通过锚杆的光纤形变解算方法解算得到智能锚杆组的三维形状变化,然后还原高危滑坡带实时状态,依据滑坡预报算法对滑坡实时状态进行分析,最终在滑坡预警管理系统6实现高危滑坡带的历史状态回溯、滑坡预测和报警。
[0096]
滑坡预警系统框图如图6所示,光纤光栅解调系统与光纤智能锚杆连接,数据发送至智能锚杆数据处理存储中心,智能锚杆数据处理存储中心包含数据交换模块,数据库管理模块,数据分析模块,数据预警模块,由数据管理预警系统统一管理。
[0097]
实施例三提供了多通道光纤光栅解调仪控制系统:
[0098]
多通道光纤光栅解调仪控制系统的主要功能是从光纤光栅解调仪获取光纤光栅传感数据,然后解调得到光纤形状并实时显示。基于多芯光纤的形状传感系统主要分为四个模块,分别为fbg数据模块、数据预处理模块、数据解调模块、三维形状实时显示模块。
[0099]
多通道光纤光栅解调仪控制系统工作流程如图7所示,fbg数据模块从多通道光纤光栅解调仪获取多个通道的实时光栅的波长数据,并通过实时滑移平均,最终将获取到的多个通道光栅数据合成为一组光纤光栅实时波长数据,并将数据置入数据共享区,供数据预处理模块调用。
[0100]
数据预处理模块读取初始数据,包含光栅总数,光栅预挑选数、光栅的位置和系数,选择是否要保存实时光栅波长数据及保存的文件夹和文件名。从fbg数据模块置入的数据共享区中获取一组各个通道的实时波长数据,通过光栅的挑选,消去温度拉伸变化,最终处理为光栅对应的应变值,最终将光栅应变值及光栅位置、系数等数据一并置入数据共享区,供数据解调模块调用
[0101]
数据解调模块从数据预处理模块获取各个光栅的位置、系数以及各个光栅的应变值,从获取到的数据解调得到各个光栅位置处的曲率和挠率,通过这些信息,还原出光纤的空间三维形状的各个数据点,将三维形状的各个数据点置入数据共享区,供三维形状实时
显示模块调用。
[0102]
三维形状实时显示模块读取数据解调模块置入数据共享区的三维形状数据,将三维形状数据进行界面实时显示,
[0103]
实施例四提供了滑坡预警系统预警方法:
[0104]
滑坡预测模型和预报判据是滑坡预测预报成功的关键因素。图8所示为滑坡预警系统预警流程,通过锚杆的光纤形变解算方法解调得到智能锚杆组的三维形状变化,然后还原高危滑坡带实时状态,对滑坡带土体进行分析,一旦高于滑坡预警管理系统临界值,随即进行预警。
[0105]
所属实施例为本发明的优选实施方式,但本发明并不限于上述实施方式,在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1