一种晶棒槽晶向测量仪和测量方法与流程
1.本发明属于晶体晶向测量领域,具体是一种晶棒槽的晶向测量仪和测量方法。
背景技术:
2.半导体晶片原料是圆柱形晶棒,为标明圆柱形晶棒的不同方向,一般会在晶棒上开槽作为圆柱形晶棒的参考标记(如图1所示)。而晶棒槽由于深度较深,槽底部端点晶向难以直接测量。
技术实现要素:
3.针对现有技术的不足,本发明提供一种晶体槽晶向测量仪和测量方法,能够自动化测量槽任意底部端点的晶向,测量精度高。
4.一种晶棒槽晶向测量仪器,其特征在于,包含载物机构、晶向测量机构、测角仪、槽深测量机构,其中所述载物机构能够承载晶棒并带动晶棒旋转,所述测角仪能够测量晶棒旋转角度,所述槽深测量机构能够测量所述晶棒的槽深,所述晶向测量机构能够测量所述晶棒上指定点晶向。
5.优选地,所述晶棒槽晶向测量仪器还包含直径测量仪,所述直径测量仪能够测量出所述晶棒的直径。
6.如权利要求1所述的晶棒槽晶向测量仪器,其特征在于,所述测角仪包含测角机构和测角仪运动机构。
7.优选地,所述测角机构包含晶棒附着体、连接轴与编码器。
8.优选地,所述测角仪运动机构能够使得所述测角机构在前后方向和竖直方向上运动。
9.优选地,所述晶棒晶向测量仪器还包含射线装载台,所述射线装载台使得所述晶向测量机构能够在竖直方向运动。
10.优选地,所述晶棒晶向测量仪器还包含景深相机,所述景深相机能够记录晶棒表面形貌。
11.优选地,所述景深相机能够对晶棒表面形貌进行识别,判断晶棒槽是否处于所述景深相机的视场中。
12.一种应用于前文所述的晶棒槽晶向测量仪器的测量晶棒槽晶向的方法,其特征在于,将晶棒置于所述载物机构上,所述槽深测量机构在所述晶棒旋转时测量出所述晶棒的槽深,将所述晶棒槽置于所述槽深测量机构的正下方,然后将所述晶棒旋转指定角度,所述晶向测量机构能够测出旋转指定角度后所述晶棒上指定点的晶向,确定出晶棒槽底部端点晶向。
13.优选地,随着所述载物机构前后移动,一种应用于前文所述的晶棒槽晶向测量仪器能够测量所述晶棒槽底部的任意端点的晶向。
附图说明
14.图1是含晶棒槽的圆柱形晶棒横截面示意图。
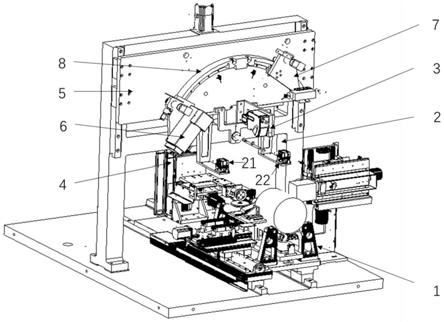
15.图2是本发明所涉及的晶棒槽晶向测量仪的整体结构示意图。
16.图3是一种具体实施方式中旋转载物台的结构示意图。
17.图4是晶棒圆心轴纵向高度测量原理示意图。
18.图5是一种具体实施方式中槽深测距仪的结构示意图。
19.图6是一种具体实施方式中测角仪的结构示意图。
20.图7是一种具体实施方式中射线测向机构的结构示意图。
21.图8是一种具体实施方式中旋转载物台与旋转载物台驱动机构连接的结构示意图。
具体实施方式
22.下面结合附图与具体实施方案来对本发明做进一步的描述,本发明的保护内容不局限于以下实施例。在不背离本发明的精神和范围下,本领域技术人员能够想到的变化和优点都包括在本发明中,并且以所附的权利要求书为保护范围。
23.晶棒槽晶向测量仪包括载物机构、晶向测量机构、测角仪和槽深测量机构。图2示出了本发明涉及的晶体槽晶向测量仪的一个具体实施例。晶棒槽晶向测量仪包括旋转载物台1、直径测量仪2、槽深测量仪3、测角仪4、射线装载台5、射线发射器6、射线接收器7和射线仪安装导轨8。其中,槽深测量仪3、射线发射器6、射线接收器7和射线仪安装导轨8安装在射线装载台5上。其中,旋转载物台1是一种载物机构,槽深测量仪3是一种槽深测量机构,射线发射器6和射线接收器7属于晶向测量机构的一部分。
24.晶向测量机构利用布拉格衍射原理测量晶体晶向,与现有技术原理相同。
25.将待测圆柱形晶棒放置于旋转载物台1上,放置后晶棒底部端面位于竖直平面内,晶棒槽呈水平方向。
26.进一步地,如图3所示,旋转载物台1包含两个与晶棒槽平行的圆柱形辊,即主动辊11和从动辊12,其中主动辊11与电机相连,能够在电机驱动下旋转,并带动晶棒旋转,同时从动辊12辅助转动。
27.进一步地,两个圆柱形主动辊11和从动辊12直径完全相等,便于保证晶棒旋转时位置的稳定性。
28.进一步地,主动辊11和从动辊12表面包覆橡胶,能够防止划伤晶棒表面。
29.进一步地,主动辊11和从动辊12表面橡胶硬度较高,耐磨性较好,且摩擦系数高,便于保证晶棒旋转时速度的稳定性。
30.进一步地,主动辊11和从动辊12表面橡胶是聚氨酯,其邵氏硬度在95度以上。
31.在待测晶棒置于旋转载物台1后,主动辊11往复转动,并带动晶棒旋转,从而消除晶棒与主动辊11和从动辊12之间的间隙。
32.当晶棒旋转数圈与主动辊11和从动辊12接触稳定后,停止旋转。开启直径测量仪2,直径测量仪2能够测量出晶棒直径。
33.优选地,直径测量仪2包含2个激光测距仪21、22和直径测量仪运动机构23。直径测量仪运动机构23能够使得激光测距仪21、22在竖直方向上下运动。
34.在直径测量仪运动机构23的驱动下,激光测距仪21、22竖直扫过晶棒,并同时测得激光测距仪21、22与晶棒之间最小距离,由于激光测距仪21和22两者之间位置已知,因此能够计算出晶棒直径。
35.进一步地,为避免测量直径时,晶棒槽位置恰好处于距离激光测距仪21或激光测距仪22最近处,在激光测距仪21、22由上至下竖直扫过晶棒时,通过比较同一竖直高度下激光测距仪21、22距离晶棒的距离是否相差较大来判断。如果在同一竖直高度下激光测距仪21、22距离晶棒的距离相差较大,表明晶棒槽位置恰好处于距离激光测距仪21或激光测距仪22最近处。此时,将主动辊21旋转90
°
,使得距离激光测距仪21或激光测距仪22最近处的晶棒具有完整圆柱面。在激光测距仪21、22由下至上竖直扫过晶棒时,测得激光测距仪21、22与晶棒之间最小距离,并计算出晶棒直径。
36.如图4所示,在已知晶棒直径r、主动辊11和从动辊12直径r、以及主动辊11和从动辊12的轴心距s的条件下,能够确定晶棒圆心轴距离主动辊11圆心轴和从动辊12圆心轴的距离,即可确定晶棒圆心轴距离主动辊11圆心轴和从动辊12圆心轴所在水平面的纵向高度位置h。
[0037][0038]
在测量完晶棒直径后,主动辊21带动晶棒旋转,通过在晶棒圆心轴竖直上方的槽深测量仪3,能够测量得到晶棒槽深度。
[0039]
如图5所示,在某些实施例中,槽深测量仪3包含一个激光测距仪31,在旋转晶棒时,激光测距仪能够测量其距离晶棒的最小值d
min
和最大值d
max
,从而能够计算出槽深d:
[0040]
d=d
max-d
min
[0041]
优选地,为了使晶棒槽中心线在晶棒圆心轴竖直上方,可以先缓慢旋转晶棒,根据激光测距仪31与晶棒的距离来判断,晶棒槽是否大致处于晶棒正上方。为了加快判断效率,可以在激光测距仪31附近配置景深相机32,景深相机32能够记录晶棒表面形貌,通过景深相机32对晶棒表面形貌的识别,判断晶棒槽是否处于其视场中,加快定位晶棒槽的位置。
[0042]
在缓慢旋转晶棒时,当激光测距仪31测量到其与晶棒的距离最大值时,停止旋转主动辊21,使得晶棒槽中心线处于晶棒圆心轴竖直上方,同时景深相机32拍照记录晶棒槽形貌。
[0043]
当晶棒槽中心线处于晶棒圆心轴竖直上方时,开启测角仪4,主动辊21开始旋转并带动晶棒旋转,并由测角仪4测量晶棒旋转角度。
[0044]
进一步地,如图6所示,测角仪4包含测角机构41和测角仪运动机构42。测角仪运动机构42能够使得测角机构41沿着竖直方向和前后方向上运动。其中,测角机构41包含晶棒附着体、连接轴412、编码器413,优选地晶棒附着体是吸盘411。连接轴412将吸盘411和编码器413连接,当吸盘411转动时,编码器413能够测量出吸盘411的转动角度。
[0045]
吸盘411能够在测角仪运动机构42的驱动下吸附在晶棒上,由于晶棒圆心轴距离主动辊11圆心轴和从动辊12圆心轴所在水平面的纵向高度位置h已知,测角仪运动机构42能够使得连接轴412的轴线与晶棒圆心轴线重合。
[0046]
当晶棒槽中心线处于晶棒圆心轴竖直上方时,开启测角仪4,吸盘411在测角仪运
动机构42的驱动下吸附在晶棒上时,并且连接轴412的轴线与晶棒圆心轴轴线重合,开启主动辊11,主动辊11带动晶棒旋转,晶棒带动吸盘411旋转,编码器413记录下晶棒旋转角度。
[0047]
如图7所示,将射线发射器6和射线接收器7置于射线仪安装导轨8上。
[0048]
在某些实施例中,射线仪安装导轨8是一体式圆弧导轨。在另外一些实施例中,射线仪安装导轨8是分体式两段圆弧导轨,两段圆弧导轨有同一圆心,射线发射器6和射线接收器7分别置于其中一段圆弧导轨上。晶向测量点与射线仪安装导轨8的圆心重合,并与晶棒圆心轴线在同一竖直平面内。
[0049]
在晶向测量点与激光测距仪31的距离已知时,晶向测量点与晶棒圆周面的竖直距离能够计算得到,调整射线装载台5在竖直方向位置,使得晶向测量点处于晶棒圆周面上。
[0050]
进一步地,射线装载台5与电机连接,能够使得射线装载台5在竖直方向上运动指定距离,将晶向测量点与晶棒圆周面重合,其中指定距离为晶向测量点与最近晶棒圆周面的竖直距离。
[0051]
射线发射器6和射线接收器7同步旋转运动,当射线接收器7接收到射线发射器6发射的射线信号时,综合射线发射器2的入射角和待测晶棒样品的衍射角度,能够测量得到晶棒旋转指定角度后待测点晶向,从而推导出晶棒槽底部端点晶向。
[0052]
如图8所示,将旋转载物台1与载物台驱动机构9连接,旋转载物台1能够沿着晶棒圆心轴线方向前后移动,重复前述步骤,能够测量晶棒槽任意横截面底部端点的晶向。
[0053]
另外,本发明还提供一种使用上文所述的晶棒槽晶向测量仪器,测量晶棒槽晶向的方法,包含如下步骤:
[0054]
步骤1:将晶棒置于载物机构上;
[0055]
步骤2:槽深测量机构在晶棒旋转时测量出晶棒的槽深;
[0056]
步骤3:旋转晶棒,将晶棒槽停置于槽深测量机构的正下方;
[0057]
步骤4:将晶棒旋转指定角度,晶向测量机构能够测出旋转指定角度后晶棒上指定点的晶向,从而推导确定出晶棒槽底部端点晶向。
[0058]
步骤5:前后移动载物机构,能够测量晶棒槽任意横截面底部端点的晶向。
[0059]
以上详细描述了本发明的较佳具体实施例,仅为了说明本发明的技术构思及特点,其目的在于让本领域技术人员能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1