一种恶劣环境下基于智能反射表面的多车辆追踪方法
1.本发明涉及多车辆追踪方法,具体涉及基于智能反射表面的多车辆追踪方法,属于信号处理技术领域。
背景技术:
2.近年来,随着交通工业的快速发展,新一代智能交通系统得到广泛的研究和应用。获取准确的车辆位置信息对于挖掘现有道路交通潜力,建立实时、高可靠、高效的交通管理系统具有重要意义。可靠实时的车辆定位可以对车辆进行有效地指挥,从而提高运输效率,保证车辆安全。从某种意义上说,车辆定位和追踪技术是智能交通系统的关键技术和核心内容。
3.全球导航卫星系统(global navigation satellite system,gnss)由于具有覆盖范围广、使用方便、全天候等优点,在车辆追踪领域得到了最广泛的应用。尽管全球导航卫星系统在开阔地区已经实现了高精度的定位性能,但由于城市环境中建筑物的遮挡,其定位性能将大幅下降。另一种流行的技术是基于测距的定位方法,它依赖于车辆到基础设施间的视线链路实现车辆定位。一般而言,用于定位的距离参数包括到达时间(time of arrival,toa)、到达角(angle of arrival,aoa)、接收信号强度(received signal strength,rss)或者将以上几种参数组合使用。这些参数可通过路边基础设施,即路侧单位(road side unit,rsu)进行测量。基于上述距离参数,车辆定位可通过三边定位算法实现。此外,由于惯性导航系统(inertial navigation system,ins)受外部环境的影响较小,因此将基于距离的方法和惯性导航系统相结合可以提高定位的可靠性。
4.尽管上述方法具有高精度的多车辆追踪性能,但是在恶劣环境下,车辆和基础设施之间可能不存在视线链路,从而导致定位精度下降。在多车辆追踪中,由于主车选取不当将进一步降低算法的鲁棒性。
技术实现要素:
5.本发明的目的是为了解决现有在恶劣环境下,车辆和基础设施之间可能不存在视线链路,从而导致定位精度下降;以及在多车辆追踪中,由于主车选取不当将进一步降低算法的鲁棒性的问题,而提出一种恶劣环境下基于智能反射表面的多车辆追踪方法。
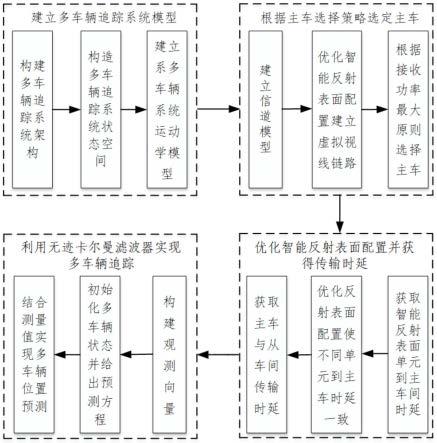
6.一种恶劣环境下基于智能反射表面的多车辆追踪方法具体过程为:
7.步骤一:建立多车辆追踪系统模型;
8.步骤二:基于步骤一建立的多车辆追踪系统模型,根据主车选择策略选定主车;
9.步骤三:基于步骤二选定主车,优化智能反射表面配置并获得传输时延;
10.步骤四:基于步骤三获得的传输时延,利用无迹卡尔曼滤波器实现多车辆追踪。
11.本发明的有益效果为:
12.本发明通过在无线环境中部署智能反射表面,建立车辆到路侧单元的虚拟视线链路,并给出了主车选择策略,通过合理选择主车和从车,在此基础上利用无迹卡尔曼滤波器
完成车辆位置信息的融合,实现恶劣环境下多车辆的鲁棒追踪,提高定位精度和鲁棒性。
13.本发明针对恶劣环境下车辆和基础设施之间没有视线链路的问题,给出了一种基于智能反射表面的多车辆追踪方法,提高了智能交通系统的安全性。
14.本发明对硬件要求低,仅需要车辆和路侧单元配备单天线收发设备,大大降低了应用成本,本发明所述技术可广泛应用于城市峡谷,山区,隧道等各场景,具有实际应用价值。
附图说明
15.图1为本发明所述的一种恶劣环境下基于智能反射表面的多车辆追踪方法的流程框图;
16.图2为本发明所述的一种恶劣环境下基于智能反射表面的多车辆追踪方法的系统模型示意图,h表示从智能反射表面到主车链路信道系数,θ为智能反射表面到主车的波达方向;
17.图3是采用本发明所述的一种恶劣环境下基于智能反射表面的多车辆追踪方法预测的车辆运动轨迹图;
18.图4是采用本发明所述的一种恶劣环境下基于智能反射表面的多车辆追踪方法在各时间点预测的车辆位置均方根误差图。
具体实施方式
19.具体实施方式一:本实施方式一种恶劣环境下基于智能反射表面的多车辆追踪方法具体过程为:
20.步骤一:建立多车辆追踪系统模型;
21.步骤二:基于步骤一建立的多车辆追踪系统模型,根据主车选择策略选定主车;
22.步骤三:基于步骤二选定主车,优化智能反射表面配置并获得传输时延;
23.步骤四:基于步骤三获得的传输时延,利用无迹卡尔曼滤波器实现多车辆追踪。
24.本发明所述的恶劣环境主要就是指建筑物的遮挡使车辆与基础设施(如卫星,路侧单元)之间不存在视线链路。在该环境下传统方法性能下降。
25.具体实施方式二:本实施方式与具体实施方式一不同的是,所述步骤一中建立的多车辆追踪系统模型,步骤如下:
26.步骤一一、多车辆追踪系统由n辆发出定位请求的车辆和一组位置已知的路侧单元以及智能反射表面组成;
27.智能反射表面部署在道路一侧并具有m个无源反射单元,每个反射单元可以独立地改变入射信号的相位,配备单天线收发设备的路侧单元可以调整智能反射表面的配置,车辆不仅可以通过智能反射表面辅助与路侧单元进行通信,也可以实现车辆之间相互通信;
28.步骤一二、设每辆车在二维笛卡尔坐标系中运动,k时刻第n辆车的状态表示为
29.其中和表示k时刻第n辆车在坐标系中x轴和y轴的坐标位置,和
表示k时刻第n辆车在坐标系中x轴方向和y轴方向上的速度,上角标t表示转置,n辆车在k时刻的状态空间向量表示为
30.步骤一三、假设每辆车在任意两个相邻时刻内(δt表示采样间隔)近似为恒速模型,因此满足xk=fx
k-1
+ωk;
31.其中x
k-1
表示n辆车在k-1时刻的状态空间向量,f=diag(fa,...,fa)是4n
×
4n的状态转移矩阵(n个fa,与系统内车辆数量一致。f是4n
×
4n的矩阵,而fa是4
×
4维矩阵。),δt表示采样间隔,diag(
·
)表示对角矩阵;ωk为均值为零的高斯分布过程噪声,具有4n
×
4n的协方差矩阵q,q=diag(qa,...,qa)(n个qa),
32.其它步骤及参数与具体实施方式一相同。
33.具体实施方式三:本实施方式与具体实施方式一或二不同的是,所述步骤二中基于步骤一建立多车辆追踪系统模型,根据主车选择策略选定主车,步骤如下:
34.步骤二一、假设所有信道都在准静态平坦衰落(平坦衰落说明在信号传输过程中可以忽略的不同采样间隔之间的干扰,即t时刻和t+δt时刻的信号独立。准静态平坦衰落说明信号在一个采样间隔δt内保持恒定。)下,且在一个采样间隔δt内信道系数(信道系数是hn和g)保持不变,并且所有车辆和路侧单元都位于智能反射表面的远场区域;
35.hn表示从智能反射表面到第n辆车链路信道系数,g表示路侧单元到智能反射表面链路信道系数;
36.以智能反射表面的第一个单元作为参考单元,hn和g表达式分别为
[0037][0038][0039]
其中j为虚数且j2=-1,λ为发射信号波长,dr为智能反射表面单元间隔,m为智能反射表面第m个单元,m=1,2,
…
,m,m为智能反射表面单元个数;θn为智能反射表面到第n辆车的波达方向,为路侧单元到智能反射表面的波达方向;
[0040]
由于智能反射表面的反射信号在远场条件下可近似为平面波,所以同一信号对于智能反射表面的每个单元的波达方向都相同;
[0041]
步骤二二、假设车辆和路侧单元之间的视线链路被阻塞,通过智能反射表面建立虚拟视线链路(车辆从路侧单元接收到的信号都是通过虚拟视线链路传输的。从图2可以看出,车辆与路侧单元的视线链路被阻塞,需要借助智能反射表面实现车辆与路侧单元的通信,因此路测单元到智能反射表面和智能反射表面到车辆这两段链路共同组成虚拟视线链
路。);具体过程为:
[0042]
用ρn表示第n辆车到智能反射表面之间的路径损失,本发明采用3gpp urban micro(umi)模型,其表达式为
[0043]
其中dn表示第n辆车到智能反射表面之间的距离,r表示智能反射表面到路侧单元的距离;
[0044]
在智能反射表面建立的虚拟视线链路辅助下,第n辆车接收到的信号表示为
[0045]
其中s是具有零均值和单位标准差的传输信号,u是标准差为σs的加性高斯白噪声,p
t
是路侧单元的发射功率,h表示共轭转置,是对于第n辆车的智能反射表面的配置控制矩阵;
[0046]
其中表示对于第n辆车的智能反射表面的第m个单元的相移参数,用于改变入射信号的相位,其中m=1,2,...,m;
[0047]
步骤二三、基于步骤二一和步骤二二,通过智能反射表面的辅助,可以使第n辆车接收到的信号yn对应的接收功率pn最大,通过调节智能反射表面的配置,分别使多车辆追踪系统中每台车接收到的信号对应的接收功率最大,并从中选择接收功率最大的车辆作为主车,其余车辆作为从车由主车引导追踪。
[0048]
其它步骤及参数与具体实施方式一或二相同。
[0049]
具体实施方式四:本实施方式与具体实施方式一至三之一不同的是,所述对于第n辆车的智能反射表面的配置控制矩阵ψn的具体求解过程为:
[0050]
由hn和g得到对于第n辆车的智能反射表面第m个单元的相移参数m=1,2,...,m,
[0051]
其中arg(
·
)表示相位,[
·
]m表示向量的第m个元素,进而得到ψn。
[0052]
其它步骤及参数与具体实施方式一至三之一相同。
[0053]
具体实施方式五:本实施方式与具体实施方式一至四之一不同的是,所述步骤三中基于步骤二选定主车,优化智能反射表面配置并获得传输时延,步骤如下:
[0054]
步骤三一、在选定主车后,假设主车到智能反射表面参考单元的距离为d
p
,经过参考单元反射的信号传输时延为τ
p
=d
p
/c,c为光速,由于智能反射表面的反射信号在远场条件下可近似为平面波,因此主车到智能反射表面第m个单元的距离为dm=d
p
+(m-1)drcos(θ
p
);
[0055]
其中θ
p
为智能反射表面到主车的波达方向,经过第m个单元反射的信号传输时延为主车到智能反射表面第m个单元和参考单元之间的相位差为所以τm与τ
p
的差值为
[0056]
步骤三二、调整对于主车的智能反射表面的配置控制矩阵ψ
p
,使
[0057]
其中表示对于主车的智能反射表面的第m个单元的相移参数,此时主车到智能反射表面每个单元反射信号的相位都与参考单元相位相同,所以δτm=0,因此主车到智能反射表面每个单元的传输时延都为τ
p
;
[0058]
步骤三三、多车辆追踪系统中余下的n-1辆从车到主车的距离分别为因此从车到主车信号传输时延表示为i=1,2,...,n-1。
[0059]
其它步骤及参数与具体实施方式一至四之一相同。
[0060]
具体实施方式六:本实施方式与具体实施方式一至五之一不同的是,所述步骤四中基于步骤三获得的传输时延,利用无迹卡尔曼滤波器实现多车辆追踪,步骤如下:
[0061]
步骤四一、在k时刻构造观测向量zk=hk(xk)+υk;
[0062]
其中hk(xk)是测量向量,包括通过惯性导航系统对车辆速度观测得到的线性部分和通过观测传输时延得到的非线性部分,因此观测向量可以写为
[0063]
其中为hk(xk)的非线性部分,的线性部分,由惯性导航系统对每辆车x轴方向和y轴方向的速度观测量组成,υk是协方差矩阵为rk的零均值观测噪声;
[0064]
其中σ1,...,σn为时延观测噪声标准差,σ
ins1
,...,σ
ins2n
为惯性导航系统对速度观测量的噪声标准差;
[0065]
步骤四二、在k=0时刻,n辆车的状态向量表示为x0,状态向量x0的预测值可以用均值代替,即状态向量x0的协方差矩阵其中e[
·
]表示数学期望;
[0066]
对于k>0时刻的状态向量,可以通过状态转移矩阵进行状态预测,即其中表示k-1时刻状态向量的预测值,表示在k-1时刻对k时刻状态向量的预测值,k-1时刻对k时刻状态向量的协方差矩阵p
k|k-1
=fp
k-1ft
+q通过预测得到,其中p
k-1
表示k-1时刻状态向量的协方差矩阵;
[0067]
步骤四三、为了在k-1时刻计算观测向量zk的统计特性,需要选取2l+1个sigma点,其中l=4n表示状态量维数,2l+1个sigma点是具有和状态向量相同的维度的4n
×
1维列向量,并可以表示为
[0068][0069]
其中表示在k-1时刻的第i个sigma点,[
·
]i表示矩阵的第i列,κ是用于确定
sigma点和状态向量预测值之间距离的参数;
[0070]
将2l+1个sigma点代入到测量向量hk(xk),从而得到在k-1时刻对k时刻观测向量的预测值此预测值是将所有的2l+1个sigma点代入到测量向量后得到的加权均值,第i个sigma点所对应的权值wi可以表示为
[0071][0072]
观测向量的协方差矩阵p
zz
和状态向量与观测向量的协方差矩阵p
xz
可以分别表示为
[0073][0074][0075]
其中用于计算协方差的权值为
[0076][0077]
α和β为无迹卡尔曼滤波器的中间参数;
[0078]
步骤四四、更新状态空间向量和协方差矩阵,得到多车辆状态空间向量的预测值
[0079][0080][0081]
其中是在k时刻通过无迹卡尔曼滤波器得到的多车辆状态空间向量的预测值,pk表示k时刻状态向量的协方差矩阵。
[0082]
包括了系统内所有车辆的位置和速度,代表了算法得到的最终结果。车辆的运动模型本身是包含噪声的,而每次预测也是包含噪声的,这给卡尔曼的预测带来了不确定性,而这种不确定性就是由状态向量的协方差矩阵pk表示,所以在递推过程中,无论是在步骤四二中,在k-1时刻对k时刻进行预测,还是步骤四三种采样sigma点,都需要协方差矩阵作为重要的中间量。
[0083]
其它步骤及参数与具体实施方式一至五之一相同。
[0084]
采用以下实施例验证本发明的有益效果:
[0085]
实施例一:
[0086]
参阅图1,本发明所述的一种恶劣环境下基于智能反射表面的多车辆追踪方法的matlab仿真实验步骤如下:
[0087]
1.建立多车辆追踪系统模型,步骤如下:
[0088]
(1)多车辆追踪系统由n辆发出定位请求的车辆和一组位置已知的路侧单元以及智能反射表面组成,智能反射表面部署在道路一侧并具有m个无源反射单元,每个反射单元
可以独立地改变入射信号的相位,配备单天线收发设备的路侧单元可以调整智能反射表面的配置,车辆不仅可以通过智能反射表面辅助与路侧单元进行通信,也可以实现车辆之间相互通信,系统模型如图2所示;
[0089]
实验中以智能反射表面的第一个单元作为原点建立二维笛卡尔坐标系,即将智能反射表面的第一个单元部署在坐标为[0,0]的位置,路侧单元部署在坐标为[30,40]的位置,n=2,m=15;
[0090]
(2)设每辆车在二维笛卡尔坐标系中运动,k时刻第n辆车的状态表示为其中和表示k时刻第n辆车在坐标系中x轴和y轴的坐标位置,和表示k时刻第n辆车在坐标系中x轴方向和y轴方向上的速度,上角标t表示转置,n辆车在k时刻的状态空间向量表示为
[0091]
实验中系统真实的初始状态向量为x0=[5m,10m/s,5m,10m/s,50m,5m/s,87m,10m/s]
t
;
[0092]
(3)假设每辆车在任意两个相邻时刻内近似为恒速模型,因此满足xk=fx
k-1
+ωk,其中x
k-1
表示n辆车在k-1时刻的状态空间向量,f=diag(fa,
…
,fa)是4n
×
4n的状态转移矩阵,δt表示采样间隔,diag(
·
)表示对角矩阵;ωk为均值为零的高斯分布过程噪声,具有4n
×
4n的协方差矩阵q,q=diag(qa,...,qa),
[0093]
实验中δt=0.2s;
[0094]
2.根据主车选择策略选定主车,步骤如下:
[0095]
(1)假设所有信道都在准静态平坦衰落下,并且信道参数在一个采样间隔δt内信道系数保持不变,并且所有车辆和路侧单元都位于智能反射表面的远场区域。hn和g分别表示从智能反射表面到第n辆车链路和路侧单元到智能反射表面链路信道参数,以智能反射表面的第一个单元作为参考单元,其表达式分别为
[0096][0097][0098]
其中j为虚数且j2=-1,λ为发射信号波长,dr为智能反射表面单元间隔,θn为智能反射表面到第n辆车的波达方向,为路侧单元到智能反射表面的波达方向,由于智能反射表面的反射信号在远场条件下可近似为平面波,所以同一信号对于智能反射表面的每个单
元的波达方向都相同;
[0099]
实验中发射信号波长λ=0.1m,单元间隔dr=0.05m,θ1=45
°
,θ2=60
°
;
[0100]
(2)假设车辆和路侧单元之间的视线链路被阻塞,并通过智能反射表面建立虚拟视线链路,用ρn表示第n辆车到智能反射表面之间的路径损失,本发明采用3gpp urban micro(umi)模型,其表达式为其中dn表示第n辆车到智能反射表面之间的距离,r表示智能反射表面到路侧单元的距离,在智能反射表面建立的虚拟视线链路辅助下,第n辆车接收到的信号表示为其中s是具有零均值和单位标准差的传输信号,u是标准差为σs的加性高斯白噪声,p
t
是路侧单元的发射功率,h表示共轭转置,是对于第n辆车的智能反射表面的配置控制矩阵,其中表示对于第n辆车的智能反射表面的第m个单元的相移参数,用于改变入射信号的相位,其中m=1,2,...,m;
[0101]
实验中r=50m,d1=7m,d2=100m,发射功率p
t
=1w,高斯白噪声u标准差σs=1;
[0102]
(3)由hn和g得到对于第n辆车的智能反射表面第m个单元的相移参数m=1,2,
…
,m,其中arg(
·
)表示相位,[
·
]m表示向量的第m个元素,进而得到ψn,在此配置下,通过智能反射表面的辅助,可以使第n辆车接收功率最大,此时接收信号的功率为通过调节智能反射表面的配置,分别使系统中每台车接收功率最大,并从中选择接收功率最大的车辆作为主车,其余车辆作为从车由主车引导追踪;
[0103]
3.优化智能反射表面配置并获得传输时延,步骤如下:
[0104]
(1)在选定主车后,假设主车到智能反射表面参考单元的距离为d
p
,经过参考单元反射的信号传输时延为τ
p
=d
p
/c,c为光速,由于智能反射表面的反射信号在远场条件下可近似为平面波,因此主车到智能反射表面第m个单元的距离为dm=d
p
+(m-1)drcos(θ
p
),其中θ
p
为智能反射表面到主车的波达方向,经过第m个单元反射的信号传输时延为主车到智能反射表面第m个单元和参考单元之间的相位差为所以τm与τ
p
的差值为m=2,3,...,m;
[0105]
(2)调整对于主车的智能反射表面的配置控制矩阵ψ
p
,使m=2,3,...,m,其中表示对于主车的智能反射表面的第m个单元的相移参数,此时主车到智能反射表面每个单元反射信号的相位都与参考单元相位相同,所以δτm=0,因此主车到智能反射表面每个单元的传输时延都为τ
p
;
[0106]
(3)系统中余下的n-1辆从车到主车的距离分别为因此从车到主车信号传输时延表示为i=1,2,...,n-1;
[0107]
4.利用无迹卡尔曼滤波器实现多车辆追踪,步骤如下:
[0108]
(1)在k时刻构造观测向量zk=hk(xk)+υk,其中hk(xk)是测量向量,包括通过惯性导
航系统对车辆速度观测得到的线性部分和通过观测传输时延得到的非线性部分,因此观测向量可以写为其中为hk(xk)的非线性部分,为hk(xk)的线性部分,由惯性导航系统对每辆车x轴方向和y轴方向的速度观测量组成,υk是协方差矩阵为rk的零均值观测噪声,其中σ1,...,σn为时延观测噪声标准差,σ
ins1
,...,σ
ins2n
为惯性导航系统对速度观测量的噪声标准差;
[0109]
实验中τ
p
和的标准差为σ1=σ2=1ns;假设惯性导航系统对于不同车辆不同方向的速度观测量的噪声标准差相同,即σ
ins1
=σ
ins2
=σ
ins3
=σ
ins4
=σ
ins
=4m/s;
[0110]
(2)在k=0时刻,n辆车的状态向量表示为x0,其预测值可以用均值代替,即协方差矩阵其中e[
·
]表示数学期望,对于k>0时刻的状态向量,可以通过状态转移矩阵进行状态预测,即其中表示k-1时刻状态向量的预测值,表示在k-1时刻对k时刻状态向量的预测值,k-1时刻对k时刻状态向量的协方差矩阵p
k|k-1
=fp
k-1ft
+q通过预测得到,其中p
k-1
表示k-1时刻状态向量的协方差矩阵;
[0111]
实验中x0=[5m,10m/s,5m,10m/s,50m,5m/s,87m,10m/s]
t
已知,且p0=q;
[0112]
(3)为了在k-1时刻计算观测向量zk的统计特性,需要选取2l+1个sigma点,其中l=4n表示状态量维数,这些sigma点是具有和状态向量相同的维度的4n
×
1维列向量,并可以表示为
[0113][0114]
其中表示在k-1时刻的第i个sigma点,[
·
]i表示矩阵的第i列,κ是用于确定sigma点和状态向量预测值之间距离的参数;将这些sigma点代入到测量向量hk(xk),从而得到在k-1时刻对k时刻观测向量的预测值此预测值是将所有的sigma点代入到测量向量后得到的加权均值,第i个sigma点所对应的权值wi可以表示为
[0115][0116]
观测向量的协方差矩阵p
zz
和状态向量与观测向量的协方差矩阵p
xz
可以分别表示为
[0117][0118]
[0119]
其中用于计算协方差的权值为
[0120][0121]
α和β为无迹卡尔曼滤波器的中间参数;
[0122]
实验中l=8,κ=-5,α=0.01,β=2;
[0123]
(4)更新状态空间向量和协方差矩阵,得到多车辆状态空间向量的预测值
[0124][0125][0126]
其中是在k时刻通过无迹卡尔曼滤波器得到的多车辆状态空间向量的预测值,pk表示k时刻状态向量的协方差矩阵。
[0127]
实验中观测时长t=20s,预测得到的车辆运动轨迹如图3所示。从图3中可以看出,预测的车辆运动轨迹与车辆真实轨迹基本重合。选取δt=0.2s,惯性导航系统对速度观测量的噪声标准差σ
ins
分别选取1m/s、3m/s和5m/s,对各时间点分别进行1000次蒙特卡洛实验,得到的各时间点预测的车辆位置的均方根误差,如图4所示。均方根误差(root mean其中表示在第t次蒙特卡罗实验中的平均追踪误差,ei(t)表示在第t次蒙特卡罗实验中第i辆车的平均追踪误差,表示为其中k=t/δt表示单次追踪过程中的采样总数,在不能整除时向下取整。为k时刻第t次蒙特卡罗实验中第i辆车的实际位置,为对应的预测位置。从图4可以看出,均方根误差随σ
ins
的减小而减小,随着时间增加而迅速减小,说明本发明方法在追踪过程中能快速收敛并能保持较高的追踪性能。综上所述,本实施例证明了本发明所述的一种恶劣环境下基于智能反射表面的多车辆追踪方法的有效性和可靠性。
[0128]
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1