一种宽量程高灵敏度电阻应变测量系统
1.本发明属于传感器技术领域,具体涉及一种宽量程高灵敏度电阻应变测量系统。
背景技术:
2.在传感器测量电路设计过程中,一般要考虑放大电路的增益与模数转换器输入电压范围之间的匹配关系。而为使传感信号具有较高的灵敏度,需要较大的放大器增益,但这导致满足模数转换器输入电压要求的信号范围降低,也即量程减小。因此,现有接口电路难以同时保证传感信号的灵敏度和量程。
技术实现要素:
3.本发明的目的是解决传感信号的灵敏度和量程间的矛盾问题,提供一种宽量程高灵敏度电阻应变测量系统。
4.本发明的技术方案
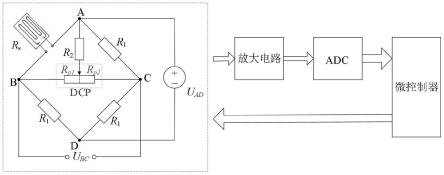
5.一种宽量程高灵敏度电阻应变测量系统,包括:单臂电桥电路,电桥调零电路,放大电路,模数转换器,微控制器;所述电桥调零电路由数字电位器(dcp)及定值电阻构成,数字电位器高端和低端分别接单臂电桥电路输出的两端(b、c),数字电位器滑动端接定值电阻(r2),定值电阻另一端接电桥电路激励的正极或负极(a或d);单臂电桥电路为惠斯电桥电路,所述惠斯电桥电路依次连接放大电路、模数转换器和微控制器,所述微控制器同时连接数字电位器的控制输入。
6.本发明同时提供了采用所述宽量程高灵敏度电阻应变测量系统进行量程扩展的方法,当放大电路输出电压不在adc要求输入电压范围内时,测量系统会自动进行量程扩展,方法包括:
7.(1)由所述微控制器调节所述dcp滑动端的位置使得所述放大电路输出电压在adc要求的输入电压范围内;
8.(2)基于所述dcp滑动端的位置变化,对目前采样电压予以补偿。
9.对采样电压予以补偿的方法:
10.(1)通过预实验,施加外力使得应变计产生应变,记录外力大小和采样电压;
11.(2)在dcp滑动端不同位置分别应用最小二乘法拟合直线;
12.(3)计算相邻直线间的距离作为所述dcp滑动端变化一次的补偿值。
13.本发明的范围由权利要求限定,其通过引用被合并在该部分中。本领域技术人员将能够通过考虑以下实施例的具体实施方式更完整地理解本发明的实施例,并且认识到关于本发明的其他优点。
14.本发明的优点和积极效果:
15.应用本发明可以将放大电路的增益设置得更高,然后通过量程扩展实现宽量程高灵敏度的电阻应变测量。
附图说明
16.图1是宽量程高灵敏度电阻应变测量系统电路示意图;
17.图2是机器人辅助外科手术工具示意图;
18.图3标定台示意图;
19.图4是标定及量程扩展结果曲线:(a)是原始数据与分段拟合,(b)是dcp滑动端位置变化;
20.图5是对采样电压进行量程扩展的结果;
21.图中,1是快换接口;2是空心玻璃纤维圆杆;rs是应变计电阻;r1是其余桥臂电阻;r2是定值电阻;r
p1
和r
p2
分别是数字电位器滑动端两侧分成的电阻;dcp是数字电位器;u
ad
是电桥直流激励;u
bc
是电桥输出电压;adc是模数转换器;3是穿刺器鞘管,4是平台,5是定滑轮,6是砝码,7是加持工具。
具体实施方式
22.实施例1:
23.本发明拟对机械手的末端执行工具在所受的一个自由度力进行实时测量。机械手在手术进行前经过固定在患者腹腔壁上的穿刺器鞘管插入腹腔;为了避免机械手和穿刺器鞘管间的接触对力测量的影响,将应变计布置在空心玻璃纤维圆杆表面上靠近末端执行工具的位置,可以更准确的测量机械手的末端执行工具在手术进行时与患者内脏组织的接触力。通过力学分析,该位置受力时产生应变较小,为使得信号具有足够的灵敏度,通常需要较高的电路增益。然而这使得满足模数转换器输入电压要求的实际信号范围变窄也即量程减小,难以获得完整的待测信号。
24.本发明提供的一种宽量程高灵敏度电阻应变测量系统如图1所示,包括:单臂电桥电路,电桥调零电路,放大电路,模数转换器和微控制器。电桥调零电路由数字电位器及定值电阻构成,数字电位器两端分别接电桥电路输出的两端(b、c),数字电位器滑动端(触头)接定值电阻(r2),定值电阻另一端接电桥电路激励的正极或负极(a或d);所述单臂电桥电路为惠斯电桥电路,该电路依次连接放大电路、模数转换器和微控制器,所述微控制器连接数字电位器的控制输入。
25.在图2所示的机械手(机械手的具体结构可参见名称为《一种微创外科丝传动、四自由度手术工具》的200910306053.5号专利/申请文件)的空心玻璃纤维圆杆2靠近末端执行工具的位置布置电阻应变计rs,利用宽量程高灵敏度电阻应变测量系统对应变计所受外力进行测量。
26.具体的电路参数设置为:电阻应变计和其余三桥臂电阻相等即rs=r1=350ω,调零电阻r2=50kω。数字电位器采用isl22313(intersil公司生产),总阻值r
p
=10kω,有256个触头。为实现较高的电路增益,放大电路由两级串联构成,第一级采用ad8422(analog devices公司生产)实现增益为100。第二级采用可编程仪表放大器,具体型号为ltc6915(analog devices公司生产)增益在0~4095可调,在本实施例实验中增益固定128。所以两级放大电路的总增益为12800。微控制器采用dsp28335(ti公司生产),模数转换器采用微控制器内嵌模数转换器。该模数转换器输入电压要求范围是0~3v。所述电桥电路由直流激励。电路采样频率为100hz。对图1中电桥(公式中各符号的定义见附图说明),根据基尔霍夫
电压和电流定律可得:
[0027][0028]
设有
[0029][0030]
设置电路满足可得
[0031][0032]
式中δrs为应变状态时的电阻变化。电路参数确定后,式中仅有变量δrs和δr
p
。当数字电位器不调节,也就是δr
p
不变化时,传感器电阻变化δrs与电桥输出电压u
bc
线性相关。当数字电位器调节,也就是δr
p
变化时,传感器电阻变化δrs与电桥输出电压u
bc
线性关系中斜率不改变,仅截距发生变化。而截距变化与δr
p
线性相关。数字电位器的δr
p
是数字量,因此可以通过预实验确定因数字电位器调节需要的补偿值。
[0033]
首先进行预实验,计算补偿值。力的加载方式如图3所示,平台4上设置有夹持工具7,夹持工具7夹持有手术工具的快换接口1和穿刺器鞘管3,手术工具的空心玻璃纤维圆杆2部分通过穿刺器鞘管3固定在平台上,手术工具上设置应变计电阻rs,远端系细丝,细丝另一端通过定滑轮5挂载砝码6,实现圆杆径向力的施加。
[0034]
(1)施加力如图4(a)所示,原始数据以“+”标注呈现,横轴表示施加力的大小,纵轴表示采样电压。数字电位器滑动端的位置如图4(b)所示,横轴表示施加力的大小,纵轴表示dcp滑动端位置。
[0035]
(2)在dcp滑动端不同位置分别标定一条直线,计算相邻两个数字电位器触头位置直线间距离。多条直线间斜率差别不大视为相等,因此距离即是截距差的绝对值。据图中数据,相邻直线间的距离经计算约为2.5v。
[0036]
基于预实验进行的补偿值,对采样电压进行补偿。用手指拨动手术工具钳头端,记录采样电压序列,采样电压如图5中所示。
[0037]
(1)如图5中所示,在约5.7s和10.2s时,放大电路输出电压不在adc要求输入电压范围内,因此调节dcp滑动端,重新使放大电路输出电压在adc要求的输入电压范围内。
[0038]
(2)根据预实验所求补偿电压,对采样电压在时间5.7s后,进行2.5v电压补偿;对采样电压在时间10.2s后,再次叠加2.5v电压补偿。
[0039]
至此完成采样电压的量程扩展,原始adc仅能采样0~3v之间的电压,在图5中扩展至接近8v。实际情况中,据此原理可以实现更宽的测量量程。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1