非接触地下管道二维毫米级沉降实时监控方法
1.本发明涉及地下管道监测技术领域,尤其涉及的是一种非接触地下管道二维毫米级沉降实时监控方法。
背景技术:
2.地下管道是城市设施的重要组成部分,工程施工、基坑开挖和建筑物建造等会造成地下管道的位移和沉降变形,它们会对管道的正常传输、运行安全与寿命造成显著影响,有时甚至会直接危及居民的生命安全。因此,对地下埋设管道沉降进行实时高精度监测就显得尤为重要。地下管道监测方法分为直接法和间接法,直接法通常有着更高的测量精度和准确度。但是,直接法通常需要开挖地面,找出埋设在地下的管道,将观测标志固定在管道上,然后进行监测,通常具有工程量大、成本高的缺点,而一些成本低、安装方便的管道沉降监测装置又存在着不能实时监测,测量精度低,尤其是存在监测数据失真的现象。
3.因此,现有技术存在缺陷,需要改进。
技术实现要素:
4.本发明所要解决的技术问题是针对现有技术的不足提供一种非接触地下管道二维毫米级沉降实时监控方法。
5.本发明的技术方案如下:
6.一种非接触地下管道二维毫米级沉降实时监控方法,采用非接触地下管道二维毫米级沉降实时监控系统进行非接触地下管道二维毫米级沉降实时监控,监控系统包括传感器阵列探头、连接杆(3)、地下声速垂向分布实时监控装置、基座(1)、无线传输和监控终端;传感器阵列探头中设置第一超声波测距传感器(41)、第二超声波测距传感器(42)、第三超声波测距传感器(43)、1个加速度传感器(6)和1个倾角传感器(5);监控终端包括外物挤压侵入识别模块、地表振动校正模块和倾斜校正模块;包括以下步骤:
7.步骤(1):第一超声波测距传感器(41)实时获取探头与地下管道之间在竖直方向的距离;
8.步骤(2):第二超声波测距传感器(42)、第三超声波测距传感器(43)分别获取第二超声波测距传感器(42)、第三超声波测距传感器(43)与地下管道之间在竖直方向的距离,进而计算地下管道在竖直方向上的沉降值,并反演地下管道水平位移值,并将获取的数据发送到外物挤压侵入识别模块,外物挤压侵入识别模块经过计算处理后识别探头和地下管道之间是否有外物挤压侵入;
9.步骤(3):加速度传感器(6)借助加速度传感器(6)实时获取振动位移并发送到地表振动校正模块,地表振动校正模块对监测数据进行实时校正,消除振动对监测结果的影响;
10.步骤(4):倾角传感器(5)实时监控传感器阵列探头水平面的倾斜值并发送到倾斜校正模块,倾斜校正模块利用探头水平面的倾斜值对监测结果进行数据校正。
11.所述的实时监控方法,地下声速垂向分布实时监控装置,用于实时获取监测区域不同深度声音传播的速率,并建立相关函数,该函数再用于各个监测孔道沉降监测。
12.所述的实时监控方法,第一超声波测距传感器(41)与地下管道之间初始距离为d
1o
,在竖直方向上实时监测获取到的探头与地下管道之间的距离为d
1i
,其相对初始距离d
1o
的变化值为
△d1i
,变化值
△d1i
为地下管道沿竖直方向的沉降值。
13.所述的实时监控方法,步骤(2)中,实时获取第二超声波测距传感器(42)和第三超声波测距传感器(43)测得的位移相对于第一超声波测距传感器(41)测得的位移的差值分别为
△d12i
和
△d13i
,外物挤压侵入识别模块实时获取这两个差值后用于识别是否有地下外物挤压侵入到探头和地下管道之间;具体的:当∣δd
12(i)
∣和∣δd
13(i)
∣明显偏离于其特征值时,再结合di值的变化,若∣di∣值显著变小,就可以综合判定地下管道是否被外物侵入。
14.所述的实时监控方法,步骤(3)中,加速度传感器(6)实时监测获取加速度传感器探头上下振动的位移值
△
s;
15.加速度传感器探头向上振动,第一超声波传感器(41)测得的与管道的位移校正公式为:
16.d
1i
'=d
1i
‑△
s;
17.加速度传感器探头向下振动,第一超声波传感器(41)测得的与管道的位移校正公式为:
18.d
1i
'=d
1i
+
△
s。
19.所述的实时监控方法,步骤(2)中,利用第一超声波测距传感器41、第二超声波测距传感器42、第三超声波测距传感器43竖直方向上位移的实时差值反演监测点(ai)的实时横坐标x
ai
,进而反演地下管道水平位移值,对应公式为:
20.x2+y2=r2ꢀꢀꢀ
(1)
21.r为监测地下管道半径,单位为mm,由公式(1)可得:
[0022][0023]
由公式(2)可得:
[0024][0025][0026]
由公式(3)和公式(4)可得:
[0027][0028]
假定传感器阵列中第一超声波测距传感器41和第三超声波测距传感器43之间固定的水平位移值为d,则:
[0029]
x
ai
+d=x
ci
ꢀꢀꢀ
(6)
[0030]
△di
为第一超声波测距传感器41和第三超声波测距传感器43实时监测得到的竖直方向距离的差值,即:
[0031]
△di
=y
ai-y
ci
ꢀꢀꢀ
(7)
[0032]
由公式(5)、(6)和(7)可得竖直位移与x
ai
:
[0033][0034]
由公式(8)可知:(1)借助三个超声波传感器实时监测地下管道竖直方向位移的差值
△di
可以计算得到实时横坐标值x
ai
;(2)系统刚调试完成时,第一超声波传感器(41)如果没有安装在地下管道顶部的正上端,其初始横坐标亦可通过公式(8)算得x
ao
;(3)比较x
ai
和x
ao
可获得地下管道水平移动的方向和绝对位移值,即:
[0035]
管道向右运动判别方法:x
ai
>x
ao
[0036]
管道向左运动判别方法:x
ai
<x
ao
[0037]
水平位移值:
△
x
水平
=∣x
ai-x
ao
∣
[0038]
水平位移移动对管道竖直方向沉降的贡献值:
[0039][0040]
竖直方向地下管道沉降的真实值
△d真值
:
[0041]yai
<y
ao
,时,
△d真值
=
△dai
-∣y
ai-y
ao
∣
[0042]yai
>y
ao
,时,
△d真值
=
△dai
+∣y
ai-y
ao
∣
[0043]
△dai
为超声波传感器实时读取到的竖直方向上位移变化值。
[0044]
本发明具有对地下管道沉降实时监控功能,监测具有非接触、监测精度高、同时监测竖直和水平方向上位移变化、系统装置和安装工艺简单、稳定性高好、环境适应性好、后期维护要求低、开孔小、成本低和和易推广等优点。
附图说明
[0045]
图1为系统结构与组成;
[0046]
1基座,2传感器导线,3连接杆,4传感器阵列探头,41第一超声波传感器,42第二超声波传感器,43第三超声波传感器,5倾角传感器,6,加速度传感器;
[0047]
图2为地下声速垂向分布实时监控装置示意图;
[0048]
71、超声波传感器,72、超声波反射板,73、底座,74、提拉柱;
[0049]
图3为管道水平移动时超声波击中管道位置的变化;
[0050]
图4为
△hi
值的大小变化趋势;
[0051]
图5为借助竖直位移计算管道水平位移值原理示意图;
[0052]
图6为0.5米直径地下管道
△hi
与x
ai
值关系;
[0053]
图7为1米直径地下管道
△hi
与x
ai
值关系;
[0054]
图8为2米直径地下管道
△hi
与x
ai
值关系;
[0055]
图9为地下外物侵入识别原理示意图;
[0056]
图10为平板侵入时各参数变化特征
具体实施方式
[0057]
以下结合具体实施例,对本发明进行详细说明。
[0058]
实施例1
[0059]
参考图1,非接触地下管道二维毫米级沉降实时监控系统包括传感器阵列探头、连
接杆3、地下声速垂向分布实时监控装置、基座1、无线传输和监控终端。传感器阵列探头作为主要探测单元,包含3个超声波测距传感器(41、42、43)、1个加速度传感器6和1个倾角传感器5。3个超声波测距传感器的传感面朝下。第一超声波测距传感器41,实时获取探头与地下管道之间在竖直方向的距离,
△
d1i为地下管道沿竖直方向的沉降值;监控终端包括外物挤压侵入识别模块、地表振动校正模块和倾斜校正模块。
[0060]
第二超声波测距传感器42、第三超声波测距传感器43分别用于获取该两传感器与地下管道之间在竖直方向的距离,进而计算地下管道在竖直方向上的沉降值,并反演地下管道水平位移值,并将获取数据发送到外物挤压侵入识别模块,外物挤压侵入识别模块经过处理后识别探头和地下管道之间是否有外物挤压侵入。基座1和连接杆3将地表振动传递给埋在地下深处的加速度传感器6,加速度传感器6的传感面朝上,借助加速度传感器6实时获取振动位移并发送到地表振动校正模块,地表振动校正模块对监测数据进行实时校正,消除振动对监测结果的影响;倾角传感器5传感面朝上,实时监控传感器阵列探头水平面的倾斜值并发送到倾斜校正模块,倾斜校正模块利用探头水平面的倾斜值对监测结果进行数据校正。传感器阵列探头中的传感器采集的数据通过基座中的gprs/4g模块无线传输给监控终端;监控终端还具备地图接入功能,实时监测多处所有管道的沉降信息,一旦某个或某些位置信息大于设定阈值的时候,监控端会自动报警,自动发送短信至指定人员的接收终端,接收人员可根据位置信息调配人员进行人工复核。
[0061]
由超声波测距公式l=0.5
×v×
t可知,速率v是影响超声波测距测试精度的最重要因素之一,而温度、湿度、土壤致密度等不确定因素都会影响到v值的大小。与空气、水介质相对均匀不同,土壤温度、湿度、致密度等都会随深度不断变化。因此,速率v与深度密切相关,建立它们之间的对应关系是实现高精度监测的前提。
[0062]
地下声速垂向分布实时监控装置,用于实时获取监测区域不同深度声音传播的速率,并建立相关函数,该函数再用于各个监测孔道沉降监测,通过求微积分,可以获得受温度、湿度、土壤致密度、气候和季节等不确定因素影响最小的沉降值。可以避免现有校正方法带来的诸多不确定性,最大限度地降低温度、水含量、致密度、季节变化等对声音传播速率的影响,这是实现地下管道高精度沉降监测的重要保证。
[0063]
第一超声波测距传感器41:探头与地下管道之间初始距离为d
1o
,在竖直方向上实时监测获取到的探头与地下管道之间的距离为d
1i
,其相对初始距离d
1o
的变化值为
△d1i
,变化值为
△d1i
为地下管道沿竖直方向的沉降值。
[0064]
第二超声波测距传感器42和第三超声波测距传感器43,其相对于第一超声波测距传感器41竖直方向位移的差值分别为
△d12i
和
△d13i
,这两个数值的实时获取具有以下重要功能:(1)调试安装时,可以精准控制传感器阵列探头位于地下管道顶部的正上方,此区域监测误差最小;(2)调试安装时,可以精准控制探头中3个超声波传感器沿垂直于地下管道轴线方向分布,此时
△d12i
和
△d13i
具有最大值;(3)获取地下管道沉降过程当中管道的水平位移和方向,及竖直方向地下管道沉降的真值;(4)识别是否有地下外物挤压侵入到探头和地下管道之间。
[0065]
加速度传感器6:基座和连接杆将地表振动传递给深处探头,探头上下振动,直接影响监测结果,借助加速度传感器实时获取振动位移,进行数据实时校正,进而消除振动对监测结果的影响。
[0066]
倾角传感器5,实时监控探头水平面的倾斜值,当倾斜角度大小影响监测结果时进行数据校正。
[0067]
连接杆刚性中空,传感器导线从连接杆中心穿过,与基座相连。
[0068]
本发明非接触地下管道二维毫米级沉降实时监控系统的使用方法:
[0069]
用专业仪器找出拟监测地下管道的位置,开挖10~15cm小孔;
[0070]
清理所开孔道上部泥土,在距离地下管道~10cm(不严格要求)时停止挖土;
[0071]
用超声波测距传感器检查剩余土中是否有砖头等外物,如无外物,孔道内剩余土不用取出;如有外物,则挖出管道上方剩余土样,清除外物,再回填土,压实。
[0072]
将传感器阵列探头4下表面紧贴孔道内剩余土的上方。根据超声波传感器
△d12i
和
△d13i
值的大小调试探头的方向和位置,确保超声波传感器沿垂直于地下管道轴线方向分布,及探头尽可能靠近地下管道顶部的上方。
[0073]
调整探头下表面水平。调试,连线。封土,压实。进行基座固定,进行防振动、防倾斜处理。数据传输。通过电脑和手机实时监控。
[0074]
实施例2
[0075]
参考图2,地下声速垂向分布实时监控装置,分左右两部分,右边从上往下安装了一系列位于不同高度的高精度超声波测距传感器71组成阵列传感器,左边为一超声波反射板72,超声波反射板72与阵列传感器距离l为固定值。
[0076]
在路边、花坛等容易开孔的地方挖掘一竖直孔道,将装置放入土中,调整超声波反射板72与阵列传感器为竖直方向,填土,压实。
[0077]
v=2l/t,t为超声波往返时间,由各个超声波传感器测得,进而可以计算得到不同深度超声波的实时传播速率。
[0078]
得到速率v与深度的实时对应函数:y=v(x)。
[0079]
得到速率v与时间的实时对应函数:y=v(t)。
[0080]
从而最大限度降低了各种不确定因素对v的影响,进而提升管道沉降监测精度。
[0081]
受温度、湿度、土壤致密度等影响,不同深度的土壤里面声音传播的速率很可能存在梯度分布(y=v(x))。时间变化与声速变化成反比。因此,不同深度的声音传播速率与时间也同样存在着对应函数关系(y=v(t))。先利用地下声速垂向分布实时监控装置获得函数y=v(t),再利用该函数得到不受外在因素影响的各个监测点的沉降距离公式:
[0082][0083]
t为各个高精度超声波测距传感器71测距时超声波往返时间。借助于该装置可以实时监测到地表下不同深度的真实传播速率,无需再考虑校正温度、湿度、土壤致密度等不确定因素影响,最大限度降低了声速变化对测距精度的影响,是实现高精度地下测距的重要保证。采用该积分公式测距,即使夏天深处有水,浅部是干土,也能够获得高精度高准确度的实时数据
[0084]
实施例3管道水平位移和垂直位移同时监测方法
[0085]
3.1只有竖直沉降时位移算法
[0086]
水平位移:
△
x=0;
[0087]
竖直位移:
△di
=d
ai-d
ao
=d
bi-d
bo
=d
ci-d
co
。
[0088]
a、b、c分别为三个传感器(第一、第二、第三超声波测距传感器41、42、43)发出的超声波击中地下管道的位置,d
ao
、d
bo
、d
co
分别为设备刚调试完成后三个传感器与a、b、c间的竖向距离,d
ai
、d
bi
、d
ci
分别为监测过程当中实时监测到的三个传感器与a、b、c间的竖向距离。
[0089]
3.2水平位移监测必要性
[0090]
监测必要性:(1)管道在沉降过程中,很可能会产生少量的水平位移;(2)因为管道表面为曲面的因素,水平移动会造成垂直方向的位移多计或少计(图3);(3)虽然少量水平位移不会对垂直方向上的测量结果造成大的影响,但是对高精度沉降监测(≤1mm)来讲,水平方向上的位移变化却是必需要考虑的一个重要因素。
[0091]
如图3所示,地下管道无上下沉降,只发生向右水平移动,其中传感器探头被固定,其无水平位移变化。图3中传感器发出超声波击中管道的位置ai,随着管道向右水平移动,ai相对于初始位置ao会愈来愈偏左,且两者在竖直方向上位移的差值
△dai
(
△dai
=∣d
ai-d
ao
∣)会愈来愈大,这说明了两个问题:(1)
△dai
随水平位移变大而变大,且存在一一对应关系(图4);(2)
△dai
为地下管道水平移动对竖直方向沉降的贡献值,如果不扣除该值,会造成地下管道沉降监测值的多计或少计。
[0092]
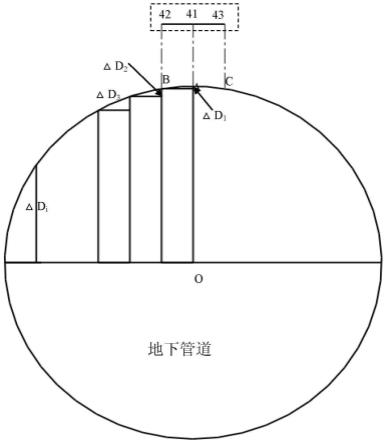
3.3利用竖直沉降量进行水平位移计算
[0093]
由上述可知,
△dai
随水平位移变大而变大,且存在一一对应关系(图4)。因此,利用第一、第二、第三超声波测距传感器41、42、43竖直方向上位移的实时差值可以反演监测点(ai)的实时横坐标,计算原理见图5,对应公式为:
[0094]
x2+y2=r2ꢀꢀꢀ
(1)
[0095]
r为监测地下管道半径,单位为mm,由公式(1)可得:
[0096][0097]
由公式(2)可得:
[0098][0099][0100]
由公式(3)和公式(4)可得:
[0101][0102]
假定传感器阵列中第一超声波测距传感器41和第三超声波测距传感器43之间固定的水平位移值为d,则:
[0103]
x
ai
+d=x
ci
ꢀꢀꢀ
(6)
[0104]
△di
为第一超声波测距传感器41和第三超声波测距传感器43实时监测得到的竖直方向距离的差值,即:
[0105]
△di
=y
ai-y
ci
ꢀꢀꢀ
(7)
[0106]
由公式(5)、(6)和(7)可得竖直位移与x
ai
:
[0107][0108]
由公式(8)可知:(1)借助三个超声波传感器实时监测地下管道竖直方向位移的差
值
△di
可以计算得到实时横坐标值x
ai
;(2)系统刚调试完成时,第一超声波传感器41有可能没有安装在地下管道顶部的正上端,其初始横坐标亦可通过公式(8)算得x
ao
;(3)比较x
ai
和x
ao
可获得地下管道水平移动的方向和绝对位移值,即:
[0109]
管道向右运动判别方法:x
ai
>x
ao
[0110]
管道向左运动判别方法:x
ai
<x
ao
[0111]
水平位移值:
△
x
水平
=∣x
ai-x
ao
∣
[0112]
水平位移移动对管道竖直方向沉降的贡献值:
[0113][0114]
竖直方向地下管道沉降的真实值
△d真值
:
[0115]yai
<y
ao
,时,
△d真值
=
△dai
-∣y
ai-y
ao
∣
[0116]yai
>y
ao
,时,
△d真值
=
△dai
+∣y
ai-y
ao
∣
[0117]
△dai
为超声波传感器实时读取到的竖直方向上位移变化值。
[0118]
图6、图7和图8是根据公式(8)得到的直径分别为0.5m、1m和2m地下管道实时监测获取的
△di
与x
ai
值函数关系图,从图中可以发现:(1)
△di
与x
ai
具有一一对应关系;(2)0.5m、1m和2m地下管道,当其x
ai
值分别在
±
70mm、
±
200mm和
±
400mm区间时
△di
与x
ai
具有良好的相关性,且x
ai
值愈小,
△di
与x
ai
线性相关性愈好,用水平位移变化值校正竖直方向位移值误差也愈小;(3)地下管道直径愈大,其测量适用范围愈大;(4)借助竖直方向监测获得的
△di
值,利用图6、图7和图8中的函数可直接计算获得x
ai
值。(5)管道直径愈大,监测用的超声波传感器愈接近管道顶部的正上方,管道水平运动对竖直方向位移测量影响就会愈小。
[0119]
实施例4地表振动消除方法
[0120]
地表车辆等产生的振动,通过基座和连接杆会向下传导至传感器探头,从而造成探头上下振动。在本系统设计方案中,传感器探头位置本应是固定的。因此,探头的上下振动会使得监测到的地下管道的沉降量偏大或偏小,故应进行振动校正。
[0121]
在传感器阵列探头的上表面加装高精度加速度传感器6,实时监测获取探头上下振动的位移值
△
s;
[0122]
探头向上振动,第一超声波传感器41测得的与管道的位移校正公式为:
[0123]d1i
'=d
1i
‑△s[0124]
探头向下振动,第一超声波传感器41测得的与管道的位移校正公式为:
[0125]d1i
'=d
1i
+
△s[0126]
实施例5地下外物侵入识别
[0127]
如图9所示,假定3个超声波传感器探头监测到的探头与管壁之间的距离分别为d1、d2和d3,则:
[0128]
δd
12
=∣d
1-d2∣
[0129]
δd
13
=∣d
1-d3∣
[0130]
δd
12(i)
=∣d
1(i)-d
2(i)
∣i=1,2,3
……n[0131]
δd
13(i)
=∣d
1(i)-d
3(i)
∣i=1,2,3
……n[0132]
δd
12(i)
和δd
13(i)
分别表示第二超声波传感器42、第三超声波传感器43读出的距离与第一超声波传感器41读出距离的实时差值。以d1、d2、d3、δd
12(i)
和δd
13(i)
之间的大小
关系可以识别是否有外物侵入到探头与地下管道之间,图10为一平板水平侵入各个参数的变化关系。当外物突然侵入时,参数变化特征为:(1)外物侵入处,∣di∣值显著变小,图10中d1=d2=d3;(2)δd1=δd2=δd3=0,∣δd
12(i)
∣和∣δd
13(i)
∣值本身比较小(管道顶部曲率比较小),且有固定的特征值和变化规律(与管道水平位移一一对应)。因此,当∣δd
12(i)
∣和∣δd
13(i)
∣明显偏离于其特征值时,再结合di值的变化,就可以综合判定地下管道是否被外物侵入。
[0133]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1