一种单测点多滚筒同时动平衡方法和系统
1.本发明属于联合收获机脱粒滚筒动平衡技术领域,尤其涉及一种单测点多滚筒同时动平衡方法和系统。
背景技术:
2.旋转机械在农用机械中被广泛使用,有研究表明旋转机械的振动问题有70%是由动平衡引起的,旋转机械的不平衡会导致轴承的磨损、轴的变形与裂纹,降低零件的使用寿命,产生振动与噪声,影响整机的可靠性。脱粒滚筒是联合收获机进行脱粒分离的主要工作部件,工作转速较高,所以脱粒滚筒的动平衡校正十分重要。现场动平衡技术是滚筒在它本身的轴承和机架上,而不是在动平衡机上进行的动平衡技术,脱粒间隙中存在的石块和物料堵塞经常造成脱粒滚筒齿杆的变形,齿的磨损,在后期齿杆和齿的更换后,滚筒的动平衡状态发生改变,现场动平衡技术不必拆卸滚筒,在整机上就可以完成滚筒动平衡的校正,在设备的后期检测与维修中起着重要作用。
3.目前国内外在空间异面交错滚筒系统现场动平衡的技术的研究上缺乏成熟的理论指导与实验验证,脱粒系统各个部件在装配至整机前,已经在动平衡机上做过动平衡,将各个部件装配至整机时,单个部件如皮带轮、链轮等传动件带来的剩余不平衡量在装配中逐级传递和放大,影响脱粒滚筒装配后的质心位置,进而影响装配后脱粒滚筒整体初始不平衡量,所以平衡好的滚筒装配成整机后在运转时仍可能发生强烈振动。脱粒滚筒在安装到整机时,由于纵轴流滚筒结构尺寸较大,支承点标高校准较为困难,不可避免的会出现安装误差,会对机器振动发生很大影响,与动平衡机上的情况完全不同。
4.大喂入量联合收获机脱粒系统的结构独特,故障激励源多,传动方式复杂,如果其中一个脱粒滚筒存在不平衡量而产生其基频处的振动,就会通过机架传递给另外一个滚筒,滚筒之间的振动就具有了相互耦合的作用和影响。脱粒系统的回转运动还会与传动系统的横向振动产生耦合,具有噪声大、非平稳、非线性的特点,使得联合收获机脱粒滚筒的动平衡技术相对于其他旋转机械更加复杂。现有的动平衡技术难以适应大喂入量联合收获机脱粒系统的空间异面交错结构的三维传递特征。
技术实现要素:
5.针对上述技术问题,本发明提供一种单测点多滚筒同时动平衡方法和系统,降低了联合收割机脱粒滚筒在装配和使用过程中产生的不平衡振动,改善了传统动平衡手段平衡多转子系统时操作过程繁琐,效果差的情况。
6.本发明的技术方案是:
7.一种单测点多滚筒同时动平衡方法,包括以下步骤:
8.获取滚筒的振动信号和转速信号:将一个振动传感器和一个转速传感器安装在其中一个滚筒a处,开机通过振动传感器测定多个滚筒的耦合振动信号,通过转速传感器测定滚筒a的转速信号作为基准信号;
9.获取多个滚筒的基频振动信号:将多个滚筒的耦合振动信号、滚筒a的转速信号和多个滚筒间的传动比输入至微处理器的单测点多滚筒动平衡算法模块中,计算获得多个滚筒的基频振动信号;
10.添加试重记录每个滚筒试重质量和相位:停机,在每个滚筒上同时添加试重,记录试重质量和相位;
11.计算每个滚筒所需的配重质量和相位:再次开机获得添加试重后的多个滚筒的振动信号,根据单测点多滚筒动平衡算法模块中的单测点多滚筒动平衡算法,计算得到多个滚筒的基频振动信号,所述基频振动信号中包括振动幅值和相位,根据影响系数法计算每个滚筒所需的配重质量和相位;
12.动平衡操作:根据每个滚筒所需的配重质量和相位,同时对多个滚筒进行动平衡操作。
13.上述方案中,所述单测点多滚筒动平衡算法模块的操作具体包括如下步骤:
14.获得各个滚筒的转速信号:根据多个滚筒间的传动比和滚筒a的转速信号生成另外几个滚筒的虚拟转速信号;
15.得到各个滚筒基频振动幅值和相位:将振动信号与多个滚筒的转速信号输入至自适应多重滤波器,得到各个滚筒基频振动幅值和相位。
16.所述自适应多重滤波器的操作具体包括如下步骤:
17.获得整周期振动信号及长度:将振动传感器获得的振动信号与各个滚筒转速信号进行整周期截断,获得互相关分析所需要的整周期截断的振动信号及长度;
18.低通滤波处理:将整周期截断后的振动信号通过低通滤波器处理,去掉高频振动信号,得到低通滤波后的振动信号,并对低涌滤波器产生的幅值和相位偏移进行线性修正;
19.得到各个滚筒基频振动幅值和相位:根据各个滚筒的基频频率和整周期信号长度,生成正弦波和余弦波分别与低通滤波后的振动信号进行互相关计算,得到各个滚筒基频振动幅值和相位。
20.进一步的,所述虚拟转速信号通过以下步骤生成:
21.滚筒之间具有传动关系,以滚筒a和滚筒b为例,根据滚筒的转速比构造出其余滚筒的虚拟转速信号,其中转速传感器生成的基准信号相位为虚拟基准信号的相位为滚筒a的转速为na,滚筒b的转速为nb。
22.进一步的,所述整周期截断具体为:将所有的转速信号通过阈值检测,对超过阈值的数据点进行定位,找到基准信号数组中超过阈值的数据点的位置并形成一个定位数组,通过基准信号的定位数组的时间节点,去截取振动信号。
23.进一步的,所述低通滤波器选择butterworth无限长冲激响应滤波器。
24.一种实现所述单测点多滚筒同时动平衡方法的系统,包括振动传感器、转速传感器和微处理器;
25.所述振动传感器用于测定多个滚筒的耦合振动信号;
26.所述转速传感器用于测定滚筒a的转速信号作为基准信号;
27.所述微处理器包括单测点多滚筒动平衡算法模块,所述单测点多滚筒动平衡算法
模块用于根据多个滚筒间的传动比和滚筒a的转速信号生成另外几个滚筒的虚拟转速信号,将振动信号与多个滚筒的转速信号输入至自适应多重滤波器,得到各个滚筒基频振动幅值和相位;所述自适应多重滤波器将振动传感器获得的振动信号与各个滚筒转速信号进行整周期截断,获得互相关分析所需要的整周期截断的振动信号及长度,将整周期截断后的振动信号通过低通滤波器处理,去掉高频振动信号,得到低通滤波后的振动信号,并对低涌滤波器产生的幅值和相位偏移进行线性修正,根据各个滚筒的基频频率和整周期信号长度,生成正弦波和余弦波分别与低通滤波后的振动信号进行互相关计算,得到各个滚筒基频振动幅值和相位。
28.上述方案中,还包括显示器;所述显示器与微处理器连接。
29.上述方案中,还包括供电单元;所述供电单元分别与振动传感器、转速传感器和微处理器连接。
30.上述方案中,所述转速传感器为光电转速传感器;所述振动传感器为加速度传感器。
31.与现有技术相比,本发明的有益效果是:
32.本发明降低了联合收割机脱粒滚筒在装配和使用过程中产生的不平衡振动,改善了传统动平衡手段平衡多转子系统时操作过程繁琐,效果差的情况。
附图说明
33.图1是本发明一实施方式的单测点多滚筒同时动平衡方法流程框图。
34.图2是本发明一实施方式的单测点多滚筒同时动平衡方法示意图。
35.图3是本发明一实施方式的自适应多重滤波模块操作方法流程框图。
36.图4是本发明一实施方式的整周期截断原理示意图。
37.图5是本发明一实施方式的整周期截断算法流程框图。
38.图6是本发明一实施方式的实现单测点多滚筒同时动平衡方法的系统框图。
具体实施方式
39.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
40.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“前”、“后”、“左”、“右”、“上”、“下”、“轴向”、“径向”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
41.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机
械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
42.如图1、2所示,一种单测点多滚筒同时动平衡方法,包括以下步骤:
43.获取滚筒的振动信号和转速信号:将一个振动传感器和一个转速传感器安装在其中一个滚筒a处,开机通过振动传感器测定多个滚筒的耦合振动信号,通过转速传感器测定滚筒a的转速信号作为基准信号;
44.获取多个滚筒的基频振动信号:将多个滚筒的耦合振动信号、滚筒a的转速信号和多个滚筒间的传动比输入至微处理器的单测点多滚筒动平衡算法模块中,计算获得多个滚筒的基频振动信号;
45.添加试重记录每个滚筒试重质量和相位:停机,在每个滚筒上分别添加试重,记录试重质量和相位;
46.计算每个滚筒所需的配重质量和相位:再次开机获得添加试重后的多个滚筒的振动信号,根据微处理器的单测点多滚筒动平衡算法模块中的单测点多滚筒动平衡算法,计算得到多个滚筒的基频振动信号,所述基频振动信号中包括振动幅值和相位,根据影响系数法计算每个滚筒所需的配重质量和相位;
47.动平衡操作:根据每个滚筒所需的配重质量和相位,同时对多个滚筒进行动平衡操作。
48.如图1,2所示,所述单测点多滚筒动平衡算法模块的操作具体包括如下步骤:
49.(1)获得各个滚筒的转速信号:根据多个滚筒间的传动比和滚筒a的转速信号生成另外几个滚筒的虚拟转速信号;
50.具体的,滚筒之间具有传动关系,以滚筒a和滚筒b为例:根据滚筒的转速比便可以构造处另外几个滚筒的虚拟转速信号,利用labview生成,其中真实转速传感器生成的基准信号相位为虚拟基准信号的相位为滚筒a的转速为na,滚筒b的转速为nb。从硬件来说,相位的值还与转速传感器与反光条的相对位置相关,在实际操作过程中,需要在多个滚筒幅盘的相同位置,贴上反光条。
51.(2)得到各个滚筒基频振动幅值和相位:将振动信号与多个滚筒的转速信号输入至自适应多重滤波器,得到各个滚筒基频振动幅值和相位。
52.如图3所示,所述自适应多重滤波器的操作具体包括如下步骤:
53.(1)获得整周期振动信号及长度:将振动传感器获得的振动信号与各个滚筒转速信号进行整周期截断,获得互相关分析所需要的整周期截断的振动信号及长度;
54.具体的,整周期截断算法的原理如图4所示和具体程序如图5所示,基准信号通过阈值检测程序,对超过阈值的数据点进行定位,找到基准信号数组中超过阈值的数据点的位置,结合转速传感器的基准信号,设置阈值为4,对超过阈值的数据点进行定位,并形成一个定位数组。整周期截断中的周期数即定位数组中第n个索引,定义为15,即数组中第16个点,截取了15个周期,与定位数组中的第0个索引相减,得到基准信号经过15个周期的点数,因为转速信号和振动信号是同步采样,且采样频率相同,所以可以通过基准信号的定位数组的时间节点,去截取振动信号。
55.(2)低通滤波处理:将整周期截断后的振动信号通过butterworth低通滤波器处理,去掉高频振动信号,得到低通滤波后的振动信号,并对低涌滤波器产生的幅值和相位偏移进行线性修正;
56.具体的,将截断后的振动信号进行低通滤波,低通滤波器选择butterworth无限长冲激响应滤波器,截止频率选择为30hz,阶数5阶,振动信号通过数字滤波器后将有一定的幅值和相位偏移,对输入信号的幅值和相位的影响进行仿真信号研究后进行线性回归拟合,得到回归拟合方程,根据输入频率的不同随时补偿信号通过滤波器后相位的失真。
57.(3)得到各个滚筒基频振动幅值和相位:根据各个滚筒的基频频率和整周期信号长度,生成正弦波和余弦波分别与低通滤波后的振动信号进行互相关计算,得到各个滚筒基频振动幅值和相位。
58.具体的,利用labview生成正弦波和余弦波,x为振动信号,y为转速信号,z为正弦波,v为余弦波,r
xz
(0)代表振动信号与同频正弦波之间的互相关函数,r
xv
(0)代表振动信号与同频余弦波之间的互相关函数,r
yz
(0)代表转速信号与同频正弦波之间的互相关运算,r
yv
(0)代表转速信号与同频余弦波之间的互相关函数,n为互相关运算的长度,a为基频振动信号幅值,β为基频振动信号绝对相位,a1为转速信号幅值,α1为转速信号绝对相位,i为是数组里第i个点。
[0059][0060][0061][0062][0063]
基频振动信号的幅值为:
[0064][0065]
基频振动信号的绝对相位为:
[0066][0067]
基准信号的绝对相位为:
[0068][0069]
不平衡振动信号与基准信号的相位差为:
[0070]
[0071]
在labview的程序处理中,arctan的输出区间为需要将弧度值转换为角度值并根据相位所在的区间,进行转化得到实际的相位角度值。
[0072]
如图6所示,一种实现所述单测点多滚筒同时动平衡方法的系统,包括振动传感器、转速传感器和微处理器;
[0073]
所述振动传感器用于测定多个滚筒的耦合振动信号;
[0074]
所述转速传感器用于测定滚筒a的转速信号作为基准信号;
[0075]
所述微处理器包括单测点多滚筒动平衡算法模块,所述单测点多滚筒动平衡算法模块用于根据多个滚筒间的传动比和滚筒a的转速信号生成另外几个滚筒的虚拟转速信号,将振动信号与多个滚筒的转速信号输入至自适应多重滤波器,得到各个滚筒基频振动幅值和相位;所述自适应多重滤波器将振动传感器获得的振动信号与各个滚筒转速信号进行整周期截断,获得互相关分析所需要的整周期截断的振动信号及长度,将整周期截断后的振动信号通过低通滤波器处理,去掉高频振动信号,得到低通滤波后的振动信号,并对低涌滤波器产生的幅值和相位偏移进行线性修正,根据各个滚筒的基频频率和整周期信号长度,生成正弦波和余弦波分别与低通滤波后的振动信号进行互相关计算,得到各个滚筒基频振动幅值和相位。
[0076]
优选的,还包括显示器;所述显示器与微处理器连接。
[0077]
优选的,还包括供电单元;所述供电单元分别与振动传感器、转速传感器和微处理器连接。
[0078]
优选的,所述转速传感器为光电转速传感器。
[0079]
优选的,所述振动传感器为加速度传感器。
[0080]
优选的,还包括信号采集模块,振动传感器通过恒流适配器与信号采集模块连接,所述光电转速传感器通过脉冲整形电路与信号采集模块连接,所述信号采集模块与微处理器连接,且通过降压模块与供电模块连接。
[0081]
优选的,所述供电模块选择3s,2800mah锂电池为光电转速传感器,信号采集模块,微处理器供电,因为三者的供电电压都为5v,所以添加了降压模块,进行电压转换,降压模块使用12v转5v的2a直流电源稳压转换器。信号采集模块选择了北京启创莫非的mps-140801-m数据采集卡,分辨率为24位,采用usb总线接口与下位机连接,该采集卡为iepe通道与电压通道混合型数据采集卡,采用iepe通道采集振动加速度数据,电压通道采集光电传感器的数据。振动信号的测量采用iepe型加速度传感器,整机现场动平衡时振动信号较小,灵敏度为1000mv/g加速度传感器,频率范围为0.1~8000hz,加速度量程为
±
5g。基准信号的测量采用反射型光电传感器,其基本原理是以光电效应为基础,在滚筒表面贴反光条,发射管发射光源,接受管接受光源,滚筒转动时,反射光与不反射光交替出现。光电传感器分pnp与npn两种输出类型,为了配合基准信号的分析方法,选择pnp型输出回路,内部开关连接于信号端与正级,信号端平时为低电平,当接收到反光条的反射信号时,信号为高电平输出。经过放大滤波整形,输出脉冲信号。
[0082]
对比试验:
[0083]
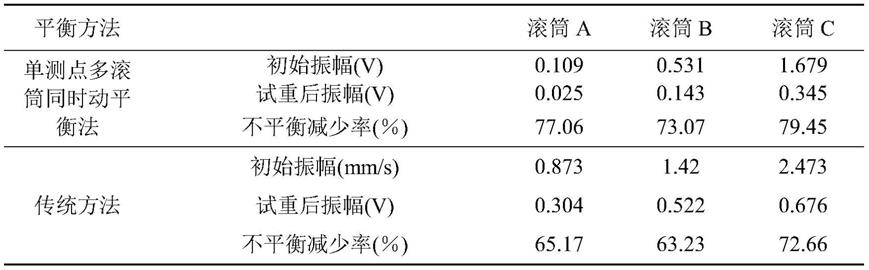
以三滚筒为例,分别在滚筒a,b,滚筒c添加117g、152g、175g不平衡质量,将振动加速度传感器安装在滚筒a的轴承座上,光电传感器对准滚筒a幅盘上的反光条,将3个滚筒的
转速比填入微处理器中,通过初试运转,同时获得3个滚筒的初始振幅,在3个滚筒上分别添加试重,再次开机,获取试重后3个滚筒的振幅,最后同时计算出3个滚筒的配重,取下试重,添加配重块,测得配重后振幅。实现单测点多滚筒同时动平衡方法的系统三个滚筒平衡前后,测点的振动幅值如表1所示。利用北京森德格公司的s956y-1便携式动平衡仪器做比较试验,利用传统平衡方法逐个对滚筒进行平衡。
[0084]
表1两种方法的平衡效果试验
[0085][0086]
可以看出,单测点多滚筒同时动平衡法的平衡效果约为76%,而传统平衡法的平衡效果约为66%。对于多滚筒系统,采用单测点多滚筒同时动平衡法,可以有效提高10%的平衡效果。此外,在本实施例中3只滚筒只需3次启停即可完成多滚筒平衡步骤,大大节省了在线检测时间。
[0087]
对联合收获机上的多滚筒系统进行在线动平衡校正,振动传感器贴在滚筒轴承座位置检测轴承座处的振动,在滚筒转轴上贴反光条,作为0相位点,开机运转,测量其初始振幅和相位,根据经验公式算出试重质量的范围和相位,将一定不平衡质量通过螺栓连接,固定在钉齿和幅盘上,再次开机运转,测量其试重后的幅值和相位,根据前两次的振动数据算出配重质量和相位,最后开机测试其添加配重后的振幅和相位,滚筒相关参数如表2所示。
[0088]
表2滚筒参数
[0089][0090]
表3多滚筒系统在线动平衡数据
[0091]
横轴流滚筒a
[0092][0093]
横轴流滚筒b
[0094][0095][0096]
ω=nπ/30≈n/10
ꢀꢀ
(5-2)
[0097][0098]
u=u
per
/r
ꢀꢀ
(5-4)
[0099]
式中g为国家规定的动平衡等级,m为滚筒的质量,n为平衡转速,ω为平衡角速度,iso1940转子刚体的平衡精度等级中,农业机械的动平衡标准为g16,r为滚筒的校正半径,u
per
为剩余不平衡量,u为剩余不平衡质量。
[0100]
多级联动回转系在线动平衡数据如表3所示,滚筒参数如表2所示滚筒a和滚筒b分别做了三组试验,根据公式5-1到5-4可以计算出滚筒a动平衡精度g值最大为3.9≤g16,滚筒b动平衡精度g值最大为3.65≤g16,滚筒a和滚筒b均符合联合收获机脱粒滚筒的动平衡精度要求。
[0101]
本发明将一个振动传感器和一个转速传感器安装在其中一个滚筒a处,开机通过振动传感器测定多个滚筒的耦合振动信号,通过转速传感器测定滚筒a的转速信号作为基准信号。根据传动比和滚筒a的转速信号生成其余滚筒的虚拟转速信号,获得各个滚筒的转速和基频频率。将振动信号与各个滚筒转速信号进行整周期截断,获得互相关分析所需要的信号整周期信号长度,将整周期截断后的振动信号通过低通滤波处理,去掉高频振动信号,并对滤波器产生的幅值和相位偏移进行线性修正。根据各个滚筒的基频频率和整周期信号长度,生成正弦波和余弦波分别与低通滤波后的振动信号进行互相关计算,得到各个滚筒基频振动幅值和相位。然后利用影响系数法同时对多个滚筒进行动平衡操作。本发明所设计的单测点多滚筒动平衡算法与单独平衡各个滚筒相比,仅需n次启停机即可完成n个滚筒的动平衡操作,提高了效率,能有效降低以传动为媒介多滚筒相互的振动干扰,提高平衡效果。与布置多个传感器同时平衡多个滚筒相比,该方法成倍的节省了传感器的数量。降低了联合收割机脱粒滚筒在装配和使用过程中产生的不平衡振动,改善了传统动平衡手段平衡多转子系统时操作过程繁琐,效果差的情况。
[0102]
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施例的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施例或变更均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1