一种纯电操控纳米三维磁传感器及其阵列与磁场测量方法
1.本发明属于分析及测量控制技术领域,更具体地,涉及一种纯电操控纳米三维磁传感器及其阵列与磁场测量方法。
背景技术:
2.磁场传感器是一种探测磁场强度的大小及方向并转化为电学信号的一种装置,当前有着非常广泛的应用,基于磁场传感器可开发多种传感功能,包括电流、功率、位置、距离、速度、角度等,在工业制造、精密测量、国防与航空、医疗、地理等领域已经获得了广泛应用,并且有着持续广阔的应用空间。
3.在纳米尺度探测微弱磁场对于科学研究、生命医学、电子设备等方面都有着重大的应用价值,探测三维磁场矢量更是能获得比一维磁场更多更准确的信息。当前在脑磁图谱成像、分子磁探测、材料表征、磁空间定位芯片等应用场景中,纳米尺寸三维磁传感器都有着很高的应用潜力。
4.目前,普遍使用的磁传感器包括各向异性磁阻传感器、磁敏二极管、霍尔传感器、磁通门磁强计等能够实现对磁场方向或强度的探测,但都存在一些局限性,例如,各向异性磁阻传感器测量精度低,需要配套的校准算法;磁通门磁强计体积较大,成本高;磁敏二极管的灵敏度低,信号输出大约只有0.05mv/oe,需要匹配信号放大等模块。同时这些磁传感器的尺寸较大,探测磁场的空间分辨率也都不高,都在微米以上。
5.还有一些常用的磁传感技术为霍尔传感器、基于隧穿磁电阻效应的磁隧道结传感器、基于氮空位的量子色心传感器、基于超导量子干仪的磁传感器。
6.霍尔传感器结构简单,测量范围广泛,磁隧道结传感器单器件能够实现亚微米的尺寸和足够的灵敏度,但是由于这两类磁传感器单个器件只能测单个方向的磁场强度,所以测量三维磁场时一般需要三个器件组合测量,结构较为复杂,并且大大增加尺寸,超出纳米尺寸的分辨率。
7.基于超导量子干仪的磁传感器虽然当前也实现了纳米尺寸的磁探测,但是其本身只能测量一维磁场,并且超导材料需要在很低的温度下才可以工作,低温设施也大大增加了设备的体积和复杂性。
8.基于氮空位的量子磁传感器,通过量子色心感知磁场,具有目前最高的空间分辨率,也具有极高的灵敏度,但是使用时一般需要复杂的光学、微波设备辅助,结构较为复杂,无法集成到便携式设备及集成电路芯片当中。另外由于测试使用的氮空位色心一般是通过辐照在随机位置产生的,所以不同器件的特性也具有随机性,不适合于阵列的集成。
技术实现要素:
9.针对现有技术的缺陷和改进需求,本发明提供了一种纯电操控纳米三维磁传感器及其阵列与磁场测量方法,其目的在于用单个纳米器件实现外磁场三维矢量的测量。
10.为实现上述目的,按照本发明的第一方面,提供了一种纯电操控纳米三维磁传感
器,从下至上依次包括:自旋流生成层、磁性材料层及氧化物层;所述自旋流生成层有十字型导电通道,用于传导电流;所述磁性材料层为单磁畴纳米磁体,在所述氧化物层的作用下具有垂直其表面的磁各向异性;
11.或从下至上依次包括:自旋流生成层、自由层、隧穿层及固定层,所述自由层、隧穿层及固定层构成磁性隧道结,且所述自由层为单磁畴纳米磁体,具有垂直其表面的磁各向异性;
12.或从下至上依次包括:自旋流生成层、第一磁性层、非磁中间层、第二磁性层、钉扎层,第一磁性层、非磁中间层、第二磁性层、钉扎层构成自旋阀。且所述第一磁性层为单磁畴纳米磁体,具有垂直其表面的磁各向异性。
13.进一步地,所述氧化物层之上,还设置有保护层,用于隔绝空气。
14.进一步地,所述自旋流生成层的材料为重金属材料或拓扑绝缘体材料。
15.进一步地,所述纳米磁体的材料为cofeb、comnsi、cofesi、cofeal、gamnas、cofealsi、cofe、fept、copt、feni、fe、co或ni。
16.进一步地,所述氧化物层的材料为mgo或al2o3;
17.所述隧穿层的材料为mgo、al2o3、alox、tio2、hfo2、mgalo4、aln或bn;
18.所述第一磁性层及第二磁性层的材料为cofeb、comnsi、cofesi、cofeal、gamnas、cofealsi、cofe、fept、copt、feni、fe、co或ni;
19.所述非磁中间层材料为cu、cr、ru或ag;
20.所述钉扎层材料包括femn、irmn、nimn、ptmn或nio。
21.按照本发明的第二方面,提供了一种三维磁场测量方法,采用如第一方面任意一项所述的磁传感器,所述方法为:
22.建立三维直角坐标系:建立以十字型导电通道方向为x轴和y轴,以垂直于自旋流生成层表面的方向为z轴的三维直角坐标系;
23.纳米磁体磁化状态的随机过程激发与读取:在自旋流生成层的十字通道中,分别向x轴和y轴的正反方向施加激励电流脉冲,使所述自旋流生成层产生自旋极化电流,对所述纳米磁体施加自旋轨道力矩,进而使所述纳米磁体的磁矩方向转到难磁化方向;撤去所述激励电流脉冲,在外磁场的作用下所述纳米磁体的磁化状态以一定概率随机地回到垂直于其表面向上或向下;外加读电流脉冲,测量自旋流生成层两端的反常霍尔电压大小或磁性隧道结的电阻大小或自旋阀的电阻大小判断纳米磁体的磁化状态;重复该操作;
24.计算概率:统计某一磁化状态出现的次数,计算在对应方向上施加激励电流脉冲时,该磁化状态出现的概率,分别记为p
x+
、p
x-、p
y+
、p
y-;将概率p
x+
和p
x-相加,得到等效在z方向施加磁场时,该磁化状态的概率p1;将概率p
x+
和p
x-相减,得到等效在x方向施加磁场时,该磁化状态的概率p2;将概率p
y+
和p
y-相减,得到等效在y方向施加磁场时,该磁化状态的概率p4;
25.计算磁场矢量:将所述概率p1、p2、p4代入磁化状态出现的概率与磁场矢量之间的函数关系式,得到外磁场在三个方向上的大小;通过矢量合成,得到磁场矢量。
26.进一步地,所述磁化状态出现的概率与磁场矢量之间的函数关系式通过预先施加探测磁场获得,包括如下步骤:
27.步骤s1、分别向x轴正反方向、y轴正反方向施加激励电流脉冲;
28.步骤s2、在每个电流方向下,分别向x、y、z方向施加探测磁场;
29.步骤s3、计算每个电流方向下分别向x、y、z方向施加探测磁场时,某一磁化状态出现的概率,建立所述概率随探测磁场大小和方向变化的关系式;
30.步骤s4、根据所述关系式,得到磁化状态出现的概率与磁场矢量之间的函数关系式。
31.进一步地,测量所述反常霍尔电压时,所述读电流脉冲施加的位置和方向与所述激励电流脉冲相同;测量所述磁性隧道结的电阻大小或自旋阀的电阻大小时,所述读电流脉冲施加在z轴方向隧道结或自旋阀上。
32.按照本发明的第三方面,提供了一种纯电操控纳米三维磁传感器阵列,包括多个如第一方面任意一项所述的磁传感器,多个所述的磁传感器共用一个自旋流生成层。
33.按照本发明的第四方面,提供了一种三维原子力显微镜扫描探针,在探针上集成如第一方面任意一项所述的磁传感器。
34.总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
35.(1)本发明的三维磁传感器,通过在自旋流生成层上施加激励电流脉冲,改变单磁畴纳米磁体的磁矩方向,使其在外磁场的作用下,磁化状态以一定概率垂直于其表面向上或向下,统计二稳态纳米磁体在该随机过程中某一磁化状态出现的概率,根据该概率与磁场矢量之间的关系计算磁场矢量在三维空间方向上的分量大小。即本发明通过单个纳米器件实现了测量磁场矢量在三维空间上的分量大小量。同时,由于本发明的磁传感器为纳米器件,能够实现纳米尺度的测量,空间分辨率高,且尺寸小,易于大规模集成。
36.(2)本发明的磁场测量方法,只需施加电流脉冲,针对三种磁传感器不同的结构,读取自旋流生成层两端的反常霍尔电压大小或磁性隧道结的电阻大小或自旋阀的电阻大小,采用纯电学方式进行测量,不需要复杂的算法,测量方法简单,不需要额外的辅助设备,测量结果精准。
37.(3)进一步地,将多个磁传感器共同集成在一个自旋流生成层上,得到高密度、高空间分辨率的磁传感器阵列,使磁传感器测量器件和器件之间的间隔降低到数十纳米,可用于空间大范围的磁场测量或者磁成像。
38.(4)进一步地,将本发明的磁传感器集成到三维原子力显微镜探针尖端,能够实现材料表面磁信息的扫描成像。
39.总而言之,本发明通过单器件实现了外磁场三维矢量测量,且器件具有纳米尺寸及纳米空间分辨率,拓展了其在芯片集成、微观磁性探测、磁成像、磁定位、分子磁性探测等众多领域的应用潜力。
附图说明
40.图1为本发明提出的磁传感器的第一种结构示意图。
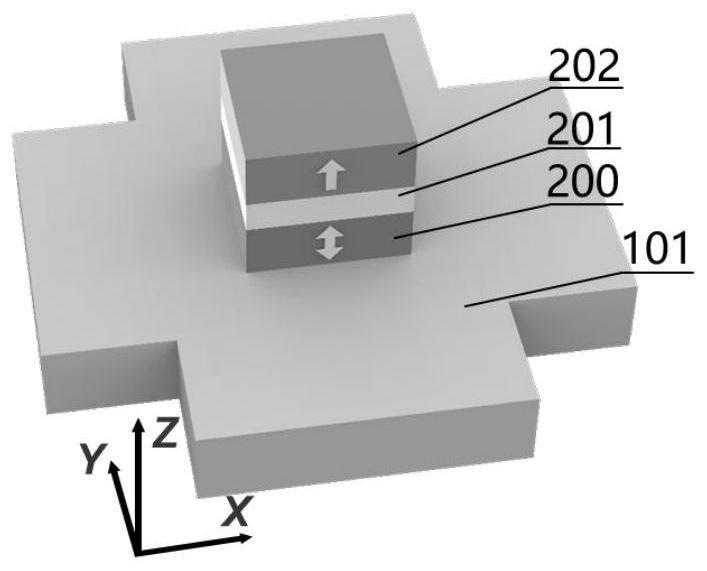
41.图2为本发明提出的磁传感器的第二种结构示意图。
42.图3为本发明提出的磁传感器的第三种结构示意图。
43.图4为自旋轨道力矩的原理示意图。
44.图5为反常霍尔效应的原理示意图。
45.图6为隧穿磁电阻效应时,磁性隧道结的两种状态,左侧为隧道结处于高阻态,右
侧为隧道结处于低阻态。
46.图7为传感器的随机翻转过程示意图。
47.图8为本发明提出的第一种磁传感器结构在测量磁场过程中电流施加的示意图。
48.图9为本发明提出的第二种磁传感器结构在测量磁场过程中电流施加的示意图。
49.图10为本发明提出的第三种磁传感器结构在测量磁场过程中电流施加的示意图。
50.图11为传感器测量磁场的三维矢量时,施加的电流脉冲示意图。
51.图12为在x轴施加激励电流时得到的磁化向下的概率分别与沿x、y、z方向的磁场大小之间的关系曲线。
52.图13为在y轴施加激励电流时得到的磁化向下的概率分别与沿x、y、z方向的磁场大小之间的关系曲线。
53.图14为传感器测量任意方向的外磁场时磁化向下的概率分别与沿x、y、z方向的磁场大小之间的关系曲线。
54.图15为本发明提供的磁传感器阵列示意图。
55.图16为本发明提供的集成了三维磁传感器的原子力显微镜的扫描探针示意图。
56.在所有附图中,相同的附图标记用来表示相同的元件或者结构,其中:
57.101-自旋流生成层,102-磁性材料层,103-氧化物层,104-保护层,200-自由层,201-隧穿层,202-固定层,300-第一磁性层,301-非磁中间层,302-第二磁性层,303-钉扎层。
具体实施方式
58.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
59.在本发明中,本发明及附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
60.为了便于描述,本发明中,根据磁传感器的几何特征建立如图1、图2、图3中所示的三维空间直角坐标系,定义垂直于自旋流生成层101方向并从自旋流生成层101到纳米磁性材料层为z轴正方向,选定自旋流生成层101的两个导电通道方向分别为x轴和y轴方向。
61.如图1所示,本发明提供的第一种纳米空间分辨率三维磁传感器,由多层材料堆叠的薄膜制备成,从下至上依次包括:自旋流生成层101、磁性材料层102及氧化物层103;
62.自旋流生成层101具有两个相互垂直的十字型导电通道,用于传导电流。作为优选,自旋流生成层101为十字型。
63.磁性材料层102位于自旋流生成层101的中央,为单磁畴纳米磁体,且厚度为纳米级,在氧化物层103的作用下具有垂直纳米磁性材料层平面的磁各向异性,具有两个稳定的磁化状态,分别为磁化强度垂直纳米磁性材料层向上和向下。
64.氧化物层103,用于辅助纳米磁性材料层得到垂直薄膜的磁晶各向异性。
65.作为优选,自旋流生成层101的材料为重金属材料ta、pt、w、mo、pd、nb或拓扑绝缘体材料bi2se3、α-sn、sb2te3、bi2te3、bi
x
sb
2-x
te3、bi2te2se。
66.作为优选,磁性材料层102材料可以是cofeb、comnsi、cofesi、cofeal、gamnas、cofealsi、cofe、fept、copt、feni、fe、co或ni。
67.作为优选,氧化物层103的材料为mgo或al2o3。
68.作为优选,在氧化物层103之上,还设置有保护层104,材料优选为金属或氧化物,用于隔绝空气保护传感器,防止材料被氧化。
69.如图2所示,为本发明提供的第二种纳米空间分辨率三维磁传感器,从下至上依次包括:自旋流生成层101、自由层200、隧穿层201及固定层202,自由层、隧穿层及固定层构成磁性隧道结。自由层为纳米磁性材料,作为感知磁场的纳米磁体,具有垂直其表面的磁各向异性。
70.作为优选,自由层及固定层的材料可以是cofeb、comnsi、cofesi、cofeal、gamnas、cofealsi、cofe、fept、copt、feni、fe、co或ni。作为隧穿层的绝缘材料种类包括mgo、al2o3、alox、tio2、hfo2、mgalo4、aln或bn。作为优选,在磁性隧道结上还设置有用于固定上层固定层磁化状态的辅助结构、金属或半导体材料制成的导电电极或保护层。
71.如图3所示,为本发明提供的第三种纳米空间分辨率三维磁传感器,从下至上依次包括:自旋流生成层101、第一磁性层300、非磁中间层301及第二磁性层302、钉扎层303,第一磁性层、非磁中间层、第二磁性层、钉扎层构成自旋阀。第一磁性层为纳米磁性材料,作为感知磁场的纳米磁体,具有垂直其表面的磁各向异性。
72.作为优选,第一磁性层及第二磁性层的材料可以是cofeb、comnsi、cofesi、cofeal、gamnas、cofealsi、cofe、fept、copt、feni、fe、co或ni。非磁中间层材料可以是cu、cr、ru、ag,钉扎层材料包括femn、irmn、nimn、ptmn、nio。
73.在实际应用中,该三维磁传感器还具有作为支撑的衬底层。
74.测量外磁场时,分别在所述自旋流生成层的十字型导电通道的正反方向施加激励电流脉冲,使所述自旋流生成层产生自旋极化电流,对所述纳米磁体施加自旋轨道力矩,进而改变所述纳米磁体的磁矩方向,并在外磁场的作用下使所述纳米磁体的磁化状态以一定概率垂直于其表面向上或向下;根据自旋流生成层两端的反常霍尔电压大小或磁性隧道结的电阻大小或自旋阀的电阻大小判断纳米磁体的磁化状态;统计某一磁化状态出现的概率,根据所述概率与磁场矢量之间的函数关系得到外磁场的大小和方向。
75.具体的,如图4所示,jc表示电流密度,m表示的是纳米磁体(即纳米磁性材料层或自由层)的磁化强度矢量。自旋轨道力矩(spin orbit torque)起源于自旋霍尔效应或者rashba效应,指在自旋流生成层101和临近自旋流生成层的磁性材料结构中,当自旋流生成层中有电流流过时,会在自旋流生成层上下表面产生自旋极化电流,自旋极化电流进入临近纳米磁性材料层,会对纳米磁性材料层产生力矩作用,改变其磁矩方向。图中所示是将磁矩拉到纳米磁性材料层薄膜平面内垂直于流过的电流方向。
76.如图5所示,针对本发明的第一种结构,当电流流过纳米磁体时,会在垂直电流和该磁体磁化方向产生一个横向的电压,电压的高低和该纳米磁体磁化强度的方向和大小相关,从而可以由电压大小判断磁体的磁化状态。
77.如图6所示,针对本发明的第二种结构,磁性隧道结由两层薄的导电磁性材料(即固定层202和自由层200)以及中间一层极薄的绝缘材料(隧穿层201)构成。其中固定层的磁性材料矫顽力较大,磁化强度一般固定,自由层的磁性材料磁化强度常被控制改变。当电子
在自由层和固定层之间传递时,即电流流过磁性隧道结时,穿过中间的隧穿层,如果固定层和自由层磁化方向平行,隧穿时受到相同磁化的两层的散射小,所以电流较大,磁性隧道结处于较低电阻状态,反之如果两者磁化方向反平行,电子从其中一层到另一层传递时,受到的散射大,所以电流较小,处于较高电阻状态。而固定层磁化方向不变,所以通过电阻的大小就可以判断固定层和自由层磁化是平行还是反平行,进而判断自由层磁化方向。
78.与第二种结构类似,针对本发明的第三种结构,电流通过自旋阀时也会受到磁性层的散射,不同在于电流通过传导的方式而非隧穿的方式穿过非磁中间层。当第一磁性层的磁化方向和第二磁性层的磁化方向平行,自旋阀具有较小的电阻阻值,当第一磁性层的磁化方向和第二磁性层的磁化方向相反时,自旋阀具有较大的电阻阻值,即巨磁阻效应。同时第二磁性层受到钉扎层的反铁磁耦合作用,具有较高的矫顽力,磁化方向一般也不变,因而通过电阻大小可以判断第一磁性层的磁化方向。
79.本发明中,在自旋流生成层十字的一条通路上施加较大的电流脉冲,命名为激励电流脉冲,记为i
exc
,本实施例中,i
exc
的电流密度大小为~107a/cm2。自旋流生成层在电流激励下,产生足够强的自旋极化电流对纳米磁性材料层产生自旋轨道力矩,改变纳米磁性材料层的磁矩方向。即在该力矩的作用下,纳米磁体的磁化强度矢量从垂直薄膜(纳米磁性材料层)方向偏转到难磁化方向,随后在激励电流撤去后,纳米磁体的磁化强度状态就会变成不稳定的高能量状态,在热扰动的影响下就会完全随机地从难磁化方向回到垂直薄膜向上或向下两个状态之一,在没有外磁场的作用时,回到这两个状态中的任一个概率都是相等的,即为0.5,如图7所示。
80.当存在外磁场时,针对第一种磁传感器结构,通过在自旋流生成层相同的通道上施加一个较小电流脉冲,命名为读电流脉冲,记为i
read
,本实施例中为~105a/cm2,该电流的施加不会影响到纳米磁体的磁化状态,在自旋流生成层的两端测量反常霍尔电压,如图8所示,通过电压高低判断纳米磁体的磁化状态。
81.针对第二种、第三种磁传感器结构,读取纳米磁体的状态是在z方向上施加读电流脉冲i
read
,使电流从上往下穿过隧道结或自旋阀,由于隧穿磁电阻效应或巨磁阻效应,当自旋流生成层上临近的纳米磁体有不同的磁化方向时,构成的隧道结或自旋阀对应的电阻也不同,由该电阻来判断自旋流生成层上纳米磁体的磁化状态,如图9、图10所示。
82.当存在外磁场时,磁场的存在会使磁化强度以特定的概率回到某一个状态。本实施例中,选择统计纳米磁体磁化方向向下状态的概率进行试验。
83.该概率和磁场大小符合特定关系,本发明中通过预先施加探测磁场获得该特定关系。如图12、图13所示,图中纵坐标p表示统计得到的纳米磁体在激励电流后磁化强度向下的概率;每个数据点均为多次激励电流脉冲统计的结果。横坐标hx、hy、hz分别表示沿着x、y、z轴方向的施加的探测磁场的大小;图中灰色点代表施加的是x轴或y轴正方向的激励电流统计的概率,黑色点代表施加的是x轴或y轴负方向的激励电流统计的概率。同时可以看到,当磁场较小时,磁场的大小和概率近似为线性关系,更易于使用。
84.具体的,本发明中通过施加多次激励电流脉冲,并且在每次激励电流脉冲之后再施加小的电流脉冲进行状态读取,这个小的电流不足以改变纳米磁体的磁化状态,即通过激励电流脉冲i
exc
和读电流脉冲i
read
交替施加,重复多次,如图11所示。对于本发明中的第一种磁传感器结构,通过产生反常霍尔效应,由反常霍尔电压的高低判断其磁化状态;对于
本发明中的第二种、第三种磁传感器结构,通过使该电流从上往下穿过隧道结或自旋阀,产生隧穿磁电阻效应或巨磁阻效应,由隧道结或自旋阀的电阻大小判断自旋流生成层上纳米磁体的磁化状态。
85.通过比较器计数器等电路,计算出某一状态出现的概率,本实施例中计算纳米磁体磁化向下状态的概率,根据该概率大小、探测磁场大小以及方向得到某一磁化状态出现的概率与磁场矢量三个方向上的分量之间的关系。作为优选,概率与探测磁场的大小满足sigmoid函数关系,可以通过概率大小、探测磁场大小以及概率与探测磁场的大小满足sigmoid函数关系得到某一磁化状态出现的概率与磁场矢量三个方向上的分量之间的关系。
86.在测量任意方向的三维磁场矢量时,可以将磁场矢量看成沿x、y、z三个方向的磁场矢量的叠加,其对概率的作用也会产生叠加。基于图12、图13可知,分别向x轴的正方向和反方向施加激励电流时,在x方向施加磁场对于概率的作用,即导致概率的变化规律是,两者具有大小相等方向相反的特性。在z方向施加磁场导致的概率的变化则相同,而在y方向施加磁场对于概率没有影响,所以在hx、hy、hz同时存在时,分别向x轴的正方向和反方向同时激励电流将概率相加,可以抵消在x方向施加的磁场,得到的概率和只与z方向施加的磁场有关,得到是等效在z方向施加磁场时,某一磁化状态的概率p1;将概率相减,可以抵消在z方向施加的磁场,得到的概率差只与x方向施加的磁场有关,得到是等效在x方向施加磁场时,某一磁化状态的概率p2。
87.同理,分别在y的正负方向上施加激励电流,并将概率相加,可以抵消在y方向施加的磁场的作用,得到的概率和只与z方向施加的磁场有关,得到是等效在z方向施加磁场时,某一磁化状态的概率p3;将概率相减,可以抵消在z方向施加的磁场的作用,得到的概率和只与y方向施加的磁场有关,得到是等效在y方向施加磁场时,某一磁化状态的概率p4。从而实现测量任意磁场矢量的功能。将概率p1、p2、p4带入上述根据探测磁场获得函数关系,得到任意磁场的三个分量的大小,通过矢量合成,得到磁场矢量,如图14所示。
88.具体的,本发明的三维磁场测量方法包括如下步骤:
89.纳米磁体磁化状态的随机过程激发与读取:在自旋流生成层的十字通道中,分别向x轴和y轴的正反方向施加较大的电流脉冲,这里我们将该电流命名为激励电流脉冲,激励电流脉冲使所述自旋流生成层产生自旋极化电流,对所述纳米磁体施加自旋轨道力矩,进而改变所述纳米磁体的磁矩方向到难磁化方向,在激励电流脉冲撤去后,在外磁场的作用下所述纳米磁体的磁化状态以一定概率随机地回到垂直于其表面向上或向下;然后外加较小的电流脉冲,我们将该电流命名为读电流脉冲,测量自旋流生成层两端的反常霍尔电压大小或磁性隧道结的电阻大小或自旋阀的电阻大小判断纳米磁体的磁化状态;重复纳米磁体磁化状态的随机过程激发与读取的操作;
90.计算概率:统计某一磁化状态出现的次数,计算在对应方向上施加激励电流脉冲时,该磁化状态出现的概率,分别记为p
x+
、p
x-、p
y+
、p
y-;将概率p
x+
和p
x-相加,得到等效在z方向施加磁场时,该磁化状态的概率p1;将概率p
x+
和p
x-相减,得到等效在x方向施加磁场时,该磁化状态的概率p2;将概率p
y+
和p
y-相加,得到等效在z方向施加磁场时,该磁化状态的概率p3;将概率p
y+
和p
y-相减,得到等效在y方向施加磁场时,该磁化状态的概率p4;本实施例中,取p1=(p
x+
+p
x-)/2,p2=p
x+-p
x-,p3=(p
y+
+p
y-)/2,p4=p
y+-p
y-。同时,可以看出,p1及p3均表示
等效在z方向施加磁场时,该磁化状态的概率,p1=p3。
91.计算磁场矢量:将概率p1、p2、p4带入磁化状态出现的概率与磁场矢量之间的函数关系式,得到外磁场在三个方向上的大小;通过矢量合成,得到磁场矢量,如图14所示。
92.其中,磁化状态出现的概率与磁场矢量之间的函数关系式通过预先施加探测磁场获得,包括如下步骤:
93.步骤s1、分别向x轴正反方向、y轴正反方向施加激励电流脉冲;
94.步骤s2、在每个电流方向下,分别向x、y、z方向施加探测磁场;
95.步骤s3、计算每个电流方向下分别向x、y、z方向施加探测磁场时,某一磁化状态出现的概率,建立概率随探测磁场大小和方向变化的关系式;
96.步骤s4、根据关系式,得到磁化状态出现的概率与磁场矢量之间的函数关系式。
97.如图15所示,基于上述提供的磁传感器,本发明还提供了一种阵列式磁传感器,由多个上述磁传感器构成,该阵列式磁传感器由多个上述磁传感器共用自旋流生成层,可以通过施加一个激励电流同时驱动所有磁传感器,加速阵列中大量器件的平均工作速度。
98.如图16所示,基于上述提供的磁传感器,本发明还提供了一种三维扫描探针,通过将上述的磁传感器设置在原子力显微镜探针或其它探针的尖端,当磁传感器越接近样品,磁场越强,探测越准确,可探测到的细节和分辨的结构也就越精细,借助原子力显微镜将传感器贴近样品表面,在进行材料表面形貌测量的同时测量表面磁场。通过本发明的这种方式将样品表面磁信息绘成图,准确性及灵活性更高。
99.本发明的磁传感器为纳米级别器件,现有的工业实践证明,尺寸最少可以达到三十纳米;并且,通过材料工艺等改进理论上预测可以进一步缩小尺寸到十纳米左右。所以该磁场传感器能够实现非常小的尺寸,从而实现超高的空间分辨率,拓展了其在芯片集成、微观磁性探测、磁成像、磁定位、分子磁性探测等众多领域的应用潜力。
100.本发明基于自旋相关效应(自旋轨道力矩、反常霍尔效应、隧穿磁电阻效应、巨磁阻效应)的工作方式,单次电流脉冲时间可达纳秒,能够进行高速测量。且判断纳米磁体的磁化状态的操作次数越多,统计得到的概率就越准确,得到的磁场矢量结果就越精确。同时,本发明的方法在常温下进行磁场矢量测量,解决了现有技术中需要在很低的温度下才能测量的技术问题。
101.本发明的磁传感器结构和工艺相对都比较简单,通过共用自旋流生成层可以轻松制备高密度传感器阵列,器件和器件之间的间隔降低到数十纳米,可用于大空间范围的磁场测量或者磁成像。也可以集成到原子力显微镜的探针尖端,用于扫描材料表面磁信息。
102.通过单个磁传感器,能够测量出三维磁场矢量的三个空间分量,相比现有技术,起到了减少测量磁场矢量的器件数量和复杂度的作用。
103.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1