一种绳系并联支撑飞行器模型动态气动力测量新方法
1.本发明属于风洞试验领域,特别是涉及柔性并联机器人运用在风洞试验中测量气动力的一种绳系并联支撑飞行器模型动态气动力测量新方法。
背景技术:
2.绳牵引并联支撑系统(wire/cable-driven parallel suspension system,wdpss)是基于并联机器人技术的一种新型机构,具有可伸缩性,通过传动机构调整绳索的长度很容易实现较大的工作空间,同时具有结构简单、成本低、响应速度快、动态性好等优点,非常适用于机械加工、装卸运载、航空航天等领域,已成为近年来研究的热点,同时为风洞动态试验提供一种新型支撑方式。
3.随着航空航天技术的不断发展,飞行器的设计要求日益提高。飞行器在飞行状态下所受的气动多维力是飞行器设计的重要依据。进行飞行器气动多维力的测量,通常需利用一定缩尺比的飞行器模型进行风洞试验,以此来探究飞行器在不同飞行状态下的受力特性。其中,模型所受升力、阻力与俯仰力矩是飞行器模型风洞试验的测试重点。但是,随着风洞试验要求的不断提高,飞行器模型内部需布置与真实飞行器等效的动力装置与传动装置,这势必会使测试装置在模型内部的安装空间受到极大制约,从而导致整体式风洞天平以及与之相连的常规支撑装置(如背撑、腹撑)很难再适用于风洞试验中飞行器模型的支撑与测量。此外,常规支撑方式所带来的支架干扰较大等问题极大影响风洞试验的测试精度与动态特性。
4.针对上述测试空间减小、模型如何支撑与如何更好地测量气动力等难题,相关领域的研究人员开展大量工作。日本宇航总局角田航天中心的tanno hideyuki等人(tanno h.komuro t.sato k,et al.free-flight aerodynamic test of ellipticcone in shocktunnel[c]//20th ata international space planes and fypersonic systems and technologies conference clasgow.2015.3655-3661)在风洞试验中通过背部支撑方式对一圆锥形飞行器模型进行连接,并通过安装于模型内部的四个微型数据记录仪和加速度传感器进行模型轴向力和法向力的测量。张小庆等人(张小庆等,高超声速飞行器脉冲风洞测力系统研究[j],实验流体力学,2018,32(5):13-18)提出一种基于应变天平与腹部支撑的一体化飞行器模型风洞试验测力方法,将试验模型所受载荷通过与其连接的天平输出为电信号,放大后采集存储于记录仪中。试验结束后,将采集的电信号代入天平静校公式计算试验模型上所受的气动力载荷,据此开展吸气式高超声速一体化飞行器推阻特性评估。西南交通大学的刘勃锴等人(刘勃锴,等.脉冲燃烧风洞新型悬挂式测力系统口〕,浙江大学学报(工学版),2018,52(4):619-627)提出一种基于盒式应变天平原理的新型悬挂式测力系统,该测试系统通过响应拉杆对飞行器模型进行固定支撑,响应拉杆作为带弹性元件的连杆,其上具有双圆弧形弹性铰链结构使之成为二力杆,只传递拉/压方向的力,从而实现气动载荷的机械分解。大连理工大学的任宗金等人(任宗金,等.组合支撑方式下气动多维力多点测量研究.中国机械工程)提出一种结合张线支撑和尾部支撑的组合支撑方式并开
发一种支撑装置与测试元件一体化的气动多维力测试系统,分析模型所受气动力与支撑反力之间的平衡关系,建立被测模型所受气动多维力与测力单元输出的力学模型。综上所述,对于风洞试验气动力测量而言,目前多数研究采用内置天平测力方法,而设计出符合动态试验要求的天平往往十分复杂;尽管也有类似采用绳索或杆测力进而解算气动力的方法,但其还只是针对静态试验,不适用于动态试验。
技术实现要素:
[0005]
本发明的目的是为克服现有技术的上述不足之处,针对风洞试验中飞行器模型支撑以及气动力的测量问题,提供可解决在风洞试验中传统支撑在动态气动力测量方面所面临问题,降低对模型的干扰,使模型达到预期的位姿变化,且在不使用内置天平的情况下,通过绳拉力解算飞行器模型气动力的一种绳系并联支撑飞行器模型动态气动力测量新方法。
[0006]
本发明包括以下步骤:
[0007]
1)采用一种冗余约束绳系并联支撑方式,牵引绳数量m不少于6根,通过动态控制绳长实现飞行器模型的位姿变化;
[0008]
2)基于气动力与绳拉力的关系,进行灵敏度分析,确定绳拉力测量精度;
[0009]
3)风洞吹风条件下,记录飞行器模型运动过程中绳拉力的动态变化;
[0010]
4)采用加速度计测量飞行器模型的惯性力,采用陀螺仪和编码器得到非线性耦合力项;
[0011]
5)分析并确定来流对运动过程中绳拉力的影响δt1;
[0012]
6)分析并确定经由滑轮的非线性摩擦力引起的绳拉力变化δt2;
[0013]
7)建立绳拉力解算动态气动载荷的关系式:
[0014]
进而求解得到风洞动态试验的非定常气动力。
[0015]
在步骤1)中,所述采用一种冗余约束绳系并联支撑方式,具体包括:牵引绳数量m大于等于6;在满足支撑系统稳定性和飞行器模型运动空间等前提要求下,可以灵活布置连接点位置;通过动态控制绳长实现飞行器模型的位姿变化。
[0016]
在步骤2)中,所述确定绳拉力测量精度的公式如下所示:
[0017]jt
δt=δcqs
[0018]
式中,j为支撑系统的雅可比矩阵,()
t
表示矩阵的转置,t为绳拉力矢量,δ()表示变化量;c=[c
d c
y c
l c
l
b c
mca cnb]
t
为气动载荷系数矢量,其中cd、cy、c
l
、c
l
、cm、cn分别为飞行器模型的阻力系数、侧力系数、升力系数、滚转力矩系数、俯仰力矩系数以及偏航力矩系数;为动压,ρ为空气密度,v为风速,s为机翼参考面积,b为机翼展长,ca为机翼的平均几何弦长;根据精度要求最高的气动系数c
x
,通过分量表达式,确定最小误差其中,i表示气动载荷系数矢量c的第i个元素,i=1,2
…
6。
[0019]
在步骤4)中,所述采用加速度计测量飞行器模型的惯性力,采用陀螺仪和编码器
得到非线性耦合力项的具体方法可为:在风洞动态试验过程中采用加速度计测量飞行器模型的惯性力采用陀螺仪和编码器测量x与进而得到非线性耦合力项
[0020]
在步骤5)中,所述分析并确定来流对运动过程中绳拉力的影响,其具体方法为:采用流体力学计算软件,根据绳的运动规律,如绳长变化率等,建立与来流速度之间的相对运动关系,进而计算绳索受到的气动载荷;然后,基于绳索动力学方程,求解气动力引起的绳拉力变化δt1。
[0021]
在步骤7)中,绳拉力解算动态气动载荷的关系式:
[0022][0023]
式中,fa为气动力/气动力矩矢量,j
t
为支撑系统的雅可比矩阵,()
t
表示矩阵的转置,t为绳拉力矢量,δt1为气动力引起的绳拉力变化,δt2为滑轮的非线性摩擦力引起的绳拉力变化,δ()表示变化量,x为飞行器模型位姿矢量,为速度项,为加速度项,表示一阶导数,表示二阶导数,fi为飞行器模型的惯性力,fn为非线性耦合力项,fg为重力矢量。
[0024]
本发明针对风洞试验中飞行器模型支撑以及气动力的测量问题,提出一种绳系并联支撑飞行器模型动态气动力测量新方法,本发明采用一种可对模型实行强迫运动的冗余约束绳系并联支撑方式,基于气动力与绳拉力的关系,解算动态气动载荷的关系式,能在通过绳系并联支撑系统控制飞行器模型姿态变化的同时,根据采集的绳拉力解算得到满足精度要求的气动载荷。本发明不仅较传统支撑方式降低了对模型的干扰,还能使模型达到预期的位姿变化,并且在不使用内置天平的情况下,通过绳拉力解算飞行器模型的气动力。本发明是一种快速有效用于风洞试验的计算飞行器模型气动力的方法,对绳牵引并联机构在风洞试验实际运用中具有重要意义。
附图说明
[0025]
图1为8绳牵引并联支撑系统示意图。
[0026]
图2为风洞闭式试验段绳系并联支撑示意图。
[0027]
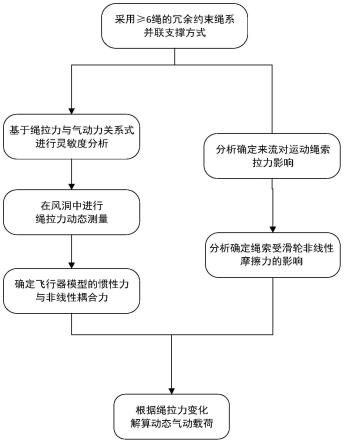
图3为本发明实施例流程示意图。
具体实施方式
[0028]
以下结合附图及具体实施例对本发明作进一步详细说明。
[0029]
本发明不仅降低风洞试验中支撑系统对飞行器模型的气动干扰,而且能在飞行器模型动态试验时不使用内置天平测力方式,仅通过测量和分析绳拉力的变化,就能够解算飞行器模型的动态气动力。
[0030]
如图3,本发明实施例包括以下步骤:
[0031]
1)采用一种冗余约束绳系并联支撑方式,牵引绳数量m为大于等于6根(图1给出8绳牵引并联支撑系统示意图),通过动态控制绳长实现飞行器模型的位姿变化;在满足支撑系统稳定性和飞行器模型运动空间等前提要求下,可以灵活布置连接点位置;通过动态控制绳长实现飞行器模型的位姿变化。
[0032]
2)基于气动力与绳拉力的关系,进行灵敏度分析,确定绳拉力测量精度;公式如下
所示:
[0033]jt
δt=δcqs
[0034]
式中,j为支撑系统的雅可比矩阵,()
t
表示矩阵的转置,t为绳拉力矢量,δ()表示变化量;c=[c
d c
y c
l c
l
b c
mca cnb]
t
为气动载荷系数矢量,其中cd、cy、c
l
、c
l
、cm、cn分别为飞行器模型的阻力系数、侧力系数、升力系数、滚转力矩系数、俯仰力矩系数以及偏航力矩系数;为动压,ρ为空气密度,v为风速,s为机翼参考面积,b为机翼展长,ca为机翼的平均几何弦长;根据精度要求最高的气动系数c
x
,通过分量表达式,确定最小误差其中,i表示气动载荷系数矢量c的第i个元素,i=1,2
…
6。
[0035]
3)风洞吹风条件下,记录飞行器模型运动过程中绳拉力的动态变化;
[0036]
4)采用加速度计测量飞行器模型的惯性力,采用陀螺仪和编码器得到非线性耦合力项;在风洞动态试验过程中采用加速度计测量飞行器模型的惯性力采用陀螺仪和编码器测量x与进而得到非线性耦合力项
[0037]
5)分析并确定来流对运动过程中绳拉力的影响δt1;采用流体力学计算软件,根据绳的运动规律,如绳长变化率等,建立与来流速度之间的相对运动关系,进而计算绳索受到的气动载荷;然后,基于绳索动力学方程,求解气动力引起的绳拉力变化δt1。
[0038]
6)经由滑轮的非线性摩擦力引起的绳拉力变化,将采用神经网络建模方法进行估计,即分别将拉力传感器放置在滑轮前后,做多自由度多参数组合的运动实验,进行模型的训练与测试,分析并确定经由滑轮的非线性摩擦力引起的绳拉力变化δt2。
[0039]
7)建立绳拉力解算动态气动载荷的关系式:
[0040]
进而求解得到风洞动态试验的非定常气动力。
[0041]
式中,fa为气动力/气动力矩矢量,j
t
为支撑系统的雅可比矩阵,()
t
表示矩阵的转置,t为绳拉力矢量,δt1为气动力引起的绳拉力变化,δt2为滑轮的非线性摩擦力引起的绳拉力变化,δ()表示变化量,x为飞行器模型位姿矢量,为速度项,为加速度项,表示一阶导数,表示二阶导数,fi为飞行器模型的惯性力,fn为非线性耦合力项,fg为重力矢量。
[0042]
图2给出风洞试验闭式阶段绳系支撑示意图。
[0043]
本发明首先采用一种不少于六根绳的冗余约束绳系并联支撑方式,通过动态控制绳长可实现飞行器模型的位姿变化;其次,基于气动力与绳拉力的关系,进行灵敏度分析,从而确定绳拉力测量的精度;随后,在风洞中进行吹风试验,记录绳拉力的动态变化;进而,采用加速度计测量飞行器模型的惯性力,采用陀螺仪和编码器得到非线性耦合力项;进一步,确定来流对运动过程中绳拉力的影响,以及经由滑轮的非线性摩擦力引起的绳拉力变化;最后,确定绳拉力解算动态气动载荷的关系式。本方法不仅降低风洞试验中支撑系统对飞行器模型的气动干扰,而且能在飞行器模型动态试验时不使用内置天平测力方式,仅通过测量和分析绳拉力的变化,就能够解算飞行器模型的动态气动力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1