基于激光双反馈自混合干涉的微转角测量方法和系统
1.本发明涉及光学应用,具体是一种利用激光自混合干涉效应测量物体转角的方法和系统。
背景技术:
2.自混合干涉(self-mixing interference,smi)效应是指从激光器发射的光波经过外部物体反射回激光腔,与激光腔内的光波发生干涉。由于反射回激光腔的反馈光经过外部物体反射时携带了外部物体的信息,再与腔内光发生干涉,会调制激光器的输出特性,从而可以实现对目标物体的物理量的测量。
3.传统的自混合干涉系统仅有一个光路通道,具有结构紧凑、简单、抗干扰强等优点;并且,自混合干涉信号检测方便,从激光器的前向输出端和后向漏光端都可检测,特别是从后向漏光端检测时,可与探测物光波完全隔离,避免检测时形成干扰。目前,自混合干涉效应主要应用于测量微转角、加速度、振动、微小角度等。
4.当激光束入射到一旋转物体时,如果激光束偏离被测物体的旋转中心时,被测物体的角度变化将导致回馈光的光程变化,将出现激光自混合干涉现象,参见中国专利文献cn1963384a,基于激光自混合干涉的微小角度测量方法及装置,该角度测量方法基于单光反馈的自混合干涉技术实现,测量精度高,但是被测物体的角度变化较大时,反馈光无法回到激光腔内形成自混合干涉,因此该方法可测的角度范围十分小,仅为-0.0007rad到+0.0007rad,这种测量精度远不能胜任高精密测量要求。
技术实现要素:
5.为克服上述技术缺陷,本发明提出一种利用转角变化引起所在通道光程变化得以调制另一外腔长度得到的自混合干涉信号强度作为基础再反推计算出转角变化值的基于激光双反馈自混合干涉的微转角测量方法和系统。
6.为了实现以上目的,本发明采用的技术方案是:一种基于激光双反馈自混合干涉的微转角测量方法,首先,激光器的谐振腔发出的光束经分光棱镜分成透射光束和反射光束;接着,透射光束穿过第一衰减片后,入射到第一反射镜,透射光束被反射后,沿原路折返至谐振腔内并与腔内光波形成反馈自混合干涉,同时,反射光束入射到转角物体关联的光学平晶,自光学平晶出来的反射光束穿过第二衰减片后,入射到第二反射镜,反射光束被反射后,沿原路折返至谐振腔内并与腔内光波形成反馈自混合干涉;接着,信号处理模块采集到双反馈自混合干涉信号并转变为电压信号,由数据采集卡传输至计算机,计算机软件计算出该双反馈干涉信号的振幅作为基准信号功率(p1);接着,信号处理模块采集到因转角物体的转角变化而产生的双反馈自混合干涉信号并转变为电压信号,由数据采集卡传输至计算机,计算出此时双反馈自混合干涉信号的振幅作为被测信号功率(p2);最后,根据被测信号功率(p2)受微转角量影响的关系式反推算出微转角量。
7.进一步地,所述基准信号功率(p1)按公式
计算,被测信号功率(p2)按公式计算,将基准信号功率(p1)和被测信号功率(p2)相除后得到公式反推计算式中转角物体转动后的外腔长度l'
ext1
,将l'
ext1
值减去基准信号外腔长度l
ext1
值,得出转角物体转动θ后引起的光程变化(外腔长),再根据旋转角θ引起光程变化(外腔长)的关系,推算出转角物体转动的角度θ。
8.同时,本发明采用的技术方案是:一种基于激光双反馈自混合干涉的微转角测量系统,包括激光器,激光器的谐振腔的光束前向输出端设置分光棱镜,分光棱镜将光束分成透射光束和反射光束;所述分光棱镜的透射光束端依次地设置第一衰减片和第一反射镜;所述分光棱镜的反射光束端依次地设置光学平晶、第二衰减片和第二反射镜,光学平晶关联被测的转角物体;所述激光器的谐振腔的后向漏光端设置光电探测器,光电探测器电连接信号处理模块,信号处理模块电连接数据采集卡,数据采集卡电连接计算机,计算机电连接控制器,控制器控制转角物体产生微转角。
9.进一步地,所述第一衰减片与第二衰减片的衰减系数比为3:7或2:8。
10.实施上述技术方案,通过分光棱镜将光束分为双光束,分别经反射镜折返后形成双反馈通道,相比单通道反馈更具有较好的抗干扰性,巧妙地利用被测物体所在反馈通道的转角变化引起光程差(外腔长度)变化以调控双反馈自混合干涉信号强度的特性,反推计算出被测物体的反馈长度变化情况,进而将变化量转换为微转角量,得到所需微转角测量结果,测量角度范围更大,约可达到-0.7rad到+0.7rad,且在较大范围内实现较高精度的微转角测量,达到实现纳米级转角测量要求。
附图说明
11.图1是双反馈自混合干涉原理的示意图。
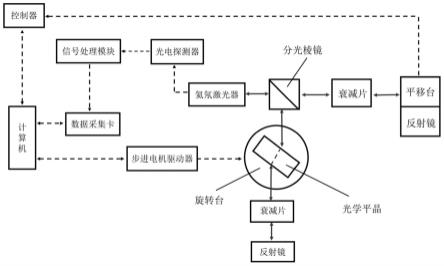
12.图2是双反馈自混合干涉微转角测量系统的示意图。
13.图3是双反馈自混合干涉信号的实验图谱。图3(a)θ=0.45411285rad,图3(b)θ=0.45389468rad,图3(c)θ=0.45394923rad,图3(d)θ=0.45400377rad,图3(e)θ=0.45427648rad,图3(f)θ=0.45378561rad。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.双反馈自混合干涉中,两个外腔中的任意一个外腔长的取值不同,都会影响调制另一个外腔长得到的自混合干涉信号的强度。若已知一个反馈外腔的具体数值,以及实验测得的双反馈自混合干涉信号的强度,则可通过计算反推求得另一个反馈外腔的数值。
16.参见图1,m1和m2是激光器谐振腔的两个内腔面,m3和m4是激光器外部的两个反馈光通道的外腔面(反射镜)。激光器谐振腔激发出的光束经过分光镜(optical coupler)分光,形成两个光束分别经两个外腔面m3和m4反射,两个反射光束均按原路返回,回到激光谐振腔内与腔内的光波进行自混合干涉,形成双反馈的激光自混合干涉。图中,l0是激光器的内腔长(谐振腔的长度),l
ext1
和l
ext2
分别是激光器的两个外腔长,其中l
ext1
代表第一个光反馈通道的外腔长度,l
ext2
代表第二个光反馈通道的外腔长度。弱反馈时,激光器的输出功率p的公式(1)表示为:
17.公式中:p0是激光器没有外部反馈时的功率,r1和r2分别是激光谐振腔两个内腔面m1和m2的反射系数,r3和r4分别是激光器外部两个反馈外腔面(反射镜)m3和m4的反射系数;ζ1和ζ2激光器的功率调制参数,其中ζ1=2r3(1-|r2|2)/r2ln(r1r2),ζ2=2r4(1-|r2|2)/r2ln(r1r2);λ是激光器的工作波长,η1和η2是激光器发出的光束经分光镜分到两个外腔的分光比。
18.由公式(1)可见,两个外腔中的任意一个外腔长的取值不同,都会影响调制另一个外腔长得到的自混合干涉信号的强度。假设用第一个反馈外腔的角度变化,调制第二个反馈外腔调制的自混合干涉信号的强度。
19.根据公式(1),第一个反馈外腔的长度取任意两个不同的数值l
ext1
和l'
ext1
,且第二个反馈外腔的长度为固定值(已知值),则相应的双反馈自混合干涉信号的功率p1和p2可分别表示为:
[0020][0021][0022]
将公式(2)和公式(3)相除可得:
[0023][0024]
由公式(4)可见,因为η、ζ和λ均为常数,若已知第一个反馈外腔l
ext1
(作为外腔长度基准值)的具体数值,以及实验测得的双反馈自混合干涉信号的强度p1和p2,则可通过计算求得第一个反馈外腔l'
ext1
的相对数值l”ext1
(用matlab求解可得正负l”ext1
,其中负的舍掉),这是因为公式(4)中三角函数为周期函数,用数学运算求解的反馈外腔l”ext1
的数值并不唯一。考虑到第一个反馈外腔长度的变化值较小(纳米级别),且在第一个反馈外腔长度基准值l
ext1
的附近变化。因此,本发明利用基准值l
ext1
来确定l'
ext1
所在的周期数κ,从而求出l'
ext1
的具体数值。假设即将基准数值l
ext1
和用matlab求解的l”ext1
代入上式,解得k,由于k为整数,对解得的k四舍五入最终确定l'
ext1
所在的周期数κ,则第一反馈外腔的实际长度l'
ext1
和l
ext1
的差值即为第一个反馈外腔长的变化值。
[0025]
若已知一个反馈外腔的具体数值,以及实验测得的双反馈自混合干涉信号的强度,则可通过计算求得另一个反馈外腔的数值。若其中一个反馈外腔长的变化是由被测物
旋转引起的,那么根据旋转角θ和外腔长l(光程变化)的对应关系,
[0026][0027]
即可计算求出被测物的转角。
[0028]
如图2所示,利用双反馈自混合干涉原理和公式(4),搭建了一种双反馈自混合干涉微转角测量系统。光源为南京来创公司的氦氖激光器(功率0.3mw,内腔长15cm,工作波长632.8nm),npbs为大恒光电gcc-403101型宽带消偏振分光棱镜(tp:rs=1:1),平移台为pi公司的p-621.1cd型压电陶瓷(最大运动行程100μm,分辨率0.4nm,线性误差0.02%),平移台控制器为德国pi公司的e-625型压电控制器,光电探测器(pd)为滨松s7686型光电二极管(光谱响应范围480~660nm),光学平晶为大恒光电gcl-13型平行平晶(折射率n=1.5163,厚度20mm,直径50mm,平行度30〞)。北京卓立汉光公司的旋转台由步进电机驱动,最小分辨率为0.0003125
°
;两个反射镜的反射率大于92%,衰减片(attenuator)用来调节两束反馈光的强度(反馈分光比)。自行研制的信号处理模块,将光电探测器探测到的光电流转换为电压;数据采集卡为ni公司的pci6220(最大采样率250k samples/s),其将电信号采集后交由计算机处理。
[0029]
双反馈自混合干涉微转角测量系统的工作过程是:激光器谐振腔的前向输出端发出的光束,入射到消偏振分光棱镜npbs,被npbs分成透射和折射两束光。其中,消偏振分光棱镜npbs的透射光束经过衰减片(衰减系数为0.3)后,入射到被固定于平移台上的反射镜,光束经反射镜反射后,沿原路反馈到激光器的谐振腔内,与腔内光波形成自混合干涉,由此形成第一个光反馈通道。消偏振分光棱镜npbs的反射光束入射到置于旋转台上的光学平晶,光束从光学平晶出射,透过衰减片(衰减系数为0.7)后,垂直入射到固定的反射镜上,光束经反射镜反射后,沿原路反馈到激光器的谐振腔内,与腔内光波自混合干涉,由此形成第二个光反馈通道。
[0030]
用控制器控制平移台作纳米级平移运动,实现对自混合干涉信号的相位调制,用步进电机驱动器控制旋转平台带动光学平晶旋转,引起第二个光反馈通道外腔长的变化,实现第二个光反馈(旋转反馈)通道对第一个光反馈(平移反馈)通道自混合干涉信号振幅的调控。在激光器谐振腔的后向漏光端,由光电探测器pd采集调制后的自混合干涉信号后,由信号处理模块进行光电转换形成电信号,再由数据采集卡采集并传输到计算机的软件部分进行处理。
[0031]
为了验证本发明提出的双反馈自混合干涉微转角测量系统的可行性,进行了微转角测量实验。激光垂直入射光学平晶外表面时,旋转台旋转角θ标记为0rad。当θ分别为0.45411285rad、0.45389468rad、0.45394923rad、0.45400377rad、0.45427648rad和0.45378561rad时,平移台做纳米级平移扫描调制自混合干涉信号,用光电探测器得到调制后的自混合干涉信号如图3(a)~图(f)。由于旋转平台带动平晶旋转引起光程变化是非线性的,为了保证调制干涉信号的良好质量,实验时旋转平台的转动范围设置在线性较好的区域20
゜
附近,扫描步长(单次转动角度)为0.0003125
゜
,完成一次调制扫描转动250次。
[0032]
以第二个光反馈(平晶反馈)通道θ=0.45411285rad时旋转台调制的干涉信号为基准信号,如图3(a)所示。平晶反馈通道θ=0.45389468rad和θ=0.45400377rad时旋转台
调制的干涉信号分别如图3(b)和(d)所示,与基准信号相比振幅略大。平晶反馈通道θ=0.45394923rad和θ=0.45378561rad时旋转台调制的干涉信号分别如图3(c)和(f)所示,与基准信号相比振幅略小。平晶反馈通道θ=0.45427648rad时旋转台调制的干涉信号如图3(e)所示,与基准信号相比振幅基本一致。
[0033]
为了验证本发明提出的微转角测量方法的可行性,对第二反馈通道平晶所在旋转台的转角进行测量和计算。举例说明求解过程:以θ=0.45411285rad时的干涉信号为基准,对应的外腔长为θ0=26+6
×
0.003125,对应所得的双反馈自混合干涉信号幅值p1=0.4和p2=0.7,将选取的基准信号对应的外腔长l
ext2
以及实验所得双反馈自混合干涉信号幅值p1、p2,代入(4)式,可求得对应实验信号p2的外腔长l
ext2
′
=0.1927μm,而对应实验信号p2实验中实际所设的腔长l2=729.4766μm,对比l
ext2
′
和l2的结果,由周期性,应有将l2=729.4766μm和l
ext2
′
=0.1927μm代入上式,解得k=2307.2,由于k应取整数,故对解得的k进行四舍五入得k=2307,并代入得l2=730.1275μm,将l2代入求得θ=0.4541rad,而实验中信号p2实际设置角度为θ2=0.4539rad,将θ和θ2做差后再取绝对值,即可求得旋转台的相对角度偏差|θ-θ2|=|0.4541-0.4539|=0.0002rad。同理,用上述方法,以θ=0.45411285rad时的干涉信号为基准,分别对第二反馈通道θ=0.45389468rad,θ=0.45394923rad,θ=0.45400377rad,θ=0.45427648rad和θ=0.45378561rad(标称值)时的被测信号进行求解,得到平晶反馈转台转角的测量值下表所示。
[0034][0035]
由上表可见,双反馈自混合干涉测量的转台转角与转台标称的转角重合度较高,测量误差的范围在8.5650e-05~3.5898e-04之间,说明该方法可用于微转角的测量。平行平晶的旋转角θ的理论范围在
±
90
°
之间,但是因为步进旋转台的角度分辨率为0.0003125
°
,所以当θ达到
±
45
°
时,调制的单次步长约为50nm,此时会因欠采样而导致干涉信号正弦性变差。根据自混合干涉原理,外腔光路λ/2的变化可以调制一个周期的干涉信号,实验中使用的激光波长为632.8nm,λ/2为316.4nm,因此当θ达到
±
45
°
时,在一个干涉信号的周期中仅有6个采样点。此时由于缺少采样点,干扰信号失真。为了保证干涉信号的良好质量,系统的角度调制范围设定在
±
45
°
之间,也就是说本发明可测的转角范围可达-0.7rad到+0.7rad。将旋转台视为被测转角物体,则本发明能够实现微转角的测量,达到纳米级精度要求。
[0036]
应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一
个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也能够经适当组合,形成本领域技术人员能够理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1