一种自动驾驶模式下的防晕车控制方法、系统及汽车与流程
1.本发明涉及自动驾驶系统,尤其涉及一种自动驾驶模式下的防晕车控制方法、系统及汽车。
背景技术:
2.在自动驾驶过程中,驾乘人员需要通过电子设备屏幕进行交互,晕车情况也会比较常见。目前自动驾驶车辆主动防晕车处理方法有基于视觉信息的方法,如利用ar技术在车内呈现车外环境,弥补视觉与人脑之间的不平衡问题,这种方法借助一些视觉设备避免晕车状况,不仅增加成本,而且技术复杂,特别是不能根据复杂路况主动调整防晕车策略。
3.研究结果表明人体器官共振导致晕车敏感频率为0.1hz~0.5hz,晕车症状和车辆振动特性、车内气味和温度、乘员坐姿有强相关性,适当的车内环境和乘坐状态对晕车也有缓解作用。目前有发明通过感知乘客的晕车情况,自动切换驾驶模式,在改善乘坐舒适性的方面取得了一些效果,但在面对各类复杂的交通状况和路面情况,仍不能有效解决晕车问题。
技术实现要素:
4.本发明提供一种自动驾驶模式下的防晕车控制方法、系统及汽车,以解决自动驾驶过程中由各种复杂路况下的晕车问题。
5.根据本发明的第一方面,提供了一种自动驾驶模式下的防晕车控制方法,包括:
6.s1:获取防晕车需求信息并根据所述防晕车需求信息进入防晕车控制模式,并进入s2;
7.s2:采集路面信息和车身信息,根据所采集到的路面信息和车身信息计算路面激励频率和车身振动响应频率;
8.s3:判断所述路面激励频率和/或所述车身振动响应频率是否在晕车敏感频率区间内;若是,则进入s4;若否,则进入s5;
9.s4:调整车速以改变所述路面激励频率;和/或调整车辆悬架刚度和阻尼以改变所述车身振动响应频率;
10.s5:调节乘坐环境和乘坐状态;
11.s6:确认是否需要进一步优化,若是,则返回s2;若否则结束调整。
12.可选的,s1中的所述防晕车需求信息具体通过自动检测或用户主动输入信息获取。
13.可选的,所述通过自动检测获取防晕车需求信息,包括监测用户表情或语音。
14.可选的,所述用户主动输入信息包括语音输入或模式选择输入。
15.可选的,s2中的采集路面信息和车身信息,根据所采集到的路面信息和车身信息计算路面激励频率和车身振动响应频率,包括:
16.s21:采集所述路面信息;所述路面信息由置于车身的雷达或摄像头采集,所述路
面信息表征了路面的起伏度;
17.s22:采集所述车身信息;所述车身信息表征了车辆的运动速度;
18.s23:根据所述路面信息和所述车身信息,通过快速傅立叶变换得到所述路面激励频率和所述车身振动响应频率。
19.可选的,所述晕车敏感频率区间为0.1hz-0.5hz。
20.可选的,所述s4中的调整车速以改变所述路面激励频率具体为通过加快车速以提高所述路面激励频率,使路面激励频率远离所述晕车敏感频率区间。
21.可选的,所述s4中的调整车辆悬架刚度和阻尼以改变所述车身振动响应频率具体为通过调高车辆悬架刚度和阻尼,使车身振动响应频率远离所述晕车敏感频率区间。
22.可选的,所述s5调节乘坐环境和乘坐状态,具体包括:
23.s51:调节车窗开闭状态,改善车内新风系统;
24.s52:调节空调系统内外循环,改善车内温度以及气味;
25.s53:调节座椅位置及姿态。
26.根据本发明的第二方面,提供了一种自动驾驶模式下的防晕车控制系统,包括:
27.中央处理器,用于获取防晕车需求信息,并根据防晕车需求信息启动防晕车控制模式;
28.车身姿态和路面信息感知模块,用于采集车身信息和路面信息,并将采集到的路面信息和车身信息发送给所述中央处理器;
29.所述中央处理器还用于根据所采集到的路面信息和车身信息计算路面激励频率和车身振动响应频率,并判断所述路面激励频率和/或车身振动响应频率是否在晕车敏感频率区间内,若是,则发送第一控制信息与第二控制信息;若否,则发送第三控制信息;
30.动力域控制模块,用于在接收到所述第一控制信息后,调节电驱动的转速和扭矩来控制车速,以改变所述路面激励频率;
31.底盘域控制模块,用于在接收到所述第二控制信息后,调节空气悬挂的阀门或者电磁悬挂的线圈电流来控制悬架刚度和阻尼,以改变所述车身振动响应频率;
32.车身域控制模块,用于在接收到所述第三控制信息后,调节乘坐环境和乘坐状态。
33.可选的,所述车身域控制模块包括车窗模块、空调模块和座椅调节模块。
34.可选的,还包括语音系统和/或模式输入系统,所述语音系统用于以语音方式接收防晕车需求信息;所述模式输入系统用于提供模式选择以接收防晕车需求信息。
35.可选的,所述中央处理器为独立控制模块;或者所述中央处理器与所述动力域控制模块或底盘域控制模块或车身域控制模块复用。
36.根据本发明的第三方面,提供了一种汽车,包括如本发明的第一方面提供的自动驾驶模式下的防晕车控制系统。
37.本发明提供的自动驾驶模式下的防晕车控制方法,根据用户的防晕车需求信息进入防晕车控制模式,并根据所采集到的路面信息和车身信息得到路面激励频率和车身振动响应频率;若所述路面激励频率和/或所述车身振动响应频率在所述晕车敏感频率区间内,通过调整车速以改变所述路面激励频率或调整车辆悬架刚度和阻尼以改变所述车身振动响应频率,从而使所述路面激励频率或所述车身振动响应频率远离所述晕车敏感频率区间;若所述路面激励频率和/或所述车身振动响应频率不在所述晕车敏感频率区间内,则通
过调节乘坐环境和乘坐状态等辅助措施缓解晕车状态;本发明提供的自动驾驶模式下的防晕车控制方法是一个闭环的调节过程,在一次调节过程结束后,如果用户有防晕车调节需求则再次进入调节过程,所述调节过程会重复进行直到用户确认晕车状态得到改善,因此能有效解决自动驾驶过程中由各种复杂路况下的晕车问题。
附图说明
38.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
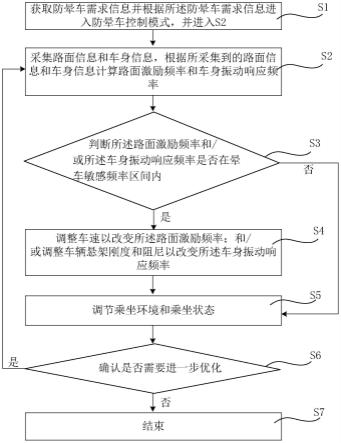
39.图1是本发明一示例性实施例中提供的自动驾驶模式下的防晕车控制方法的流程示意图;
40.图2是本发明一示例性实施例中提供的计算路面激励频率和车身振动响应频率的流程示意图;
41.图3是本发明一示例性实施例中提供的调节乘坐环境和乘坐状态的流程示意图;
42.图4是本发明一示例性实施例中提供的自动驾驶模式下的防晕车控制系统的模块结构示意图。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”、“第四”等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
45.下面以具体地实施例对本发明的技术方案进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例不再赘述。
46.请参考图1,本发明一示例性实施例中提供的自动驾驶模式下的防晕车控制方法具体包括:
47.s1:获取防晕车需求信息并根据所述防晕车需求信息进入防晕车控制模式,并进入s2;
48.s2:采集路面信息和车身信息,根据所采集到的路面信息和车身信息计算路面激励频率和车身振动响应频率;
49.s3:判断所述路面激励频率和/或所述车身振动响应频率是否在晕车敏感频率区
间内;若是,则进入s4;若否,则进入s5;
50.s4:调整车速以改变所述路面激励频率;和/或调整车辆悬架刚度和阻尼以改变所述车身振动响应频率;
51.s5:调节乘坐环境和乘坐状态;
52.s6:确认是否需要进一步优化,若是,则返回s2;若否则进入s7;
53.s7:结束。
54.本发明提供的自动驾驶模式下的防晕车控制方法是一个闭环的调节过程,在步骤s1获取防晕车需求信息并根据所述防晕车需求信息进入防晕车控制模式后,通过步骤s2~s5进行调节后,在步骤s6向用户确认,如果用户有防晕车调节需求则再次通过步骤s2~s5进行调节,所述调节过程会重复进行直到用户确认晕车状态得到改善。
55.步骤s1中的所述防晕车需求信息具体通过自动检测或用户主动输入信息获取。
56.自动检测是系统通过监测用户的状态或车辆的状态得到防晕车需求信息。在本发明其中一种实施方式中,所述通过自动检测获取防晕车需求信息,包括监测用户表情或语音。在自动驾驶中,通过图像监测系统识别到用户有晕车相关特征的表情或通过语音监测系统识别到晕车相关特征语言自动得到防晕车需求信息从而进入防晕车控制模式。
57.用户主动输入是用户在有晕车症状时主动要求系统进入防晕车模式,其中一种实施方式中,所述用户主动输入信息包括语音输入或模式选择输入。用户可以通过语音系统以语音方式输入防晕车需求信息;或者通过模式输入系统如通过按钮选择进入或车载屏幕界面输入等方式输入防晕车需求信息。
58.大多数情况下晕车症状和车辆振动频率有关,当某些频率的次声波和人体器官的振动频率相近或相同,易产生共振,会引起身体不适,0.1hz-0.5hz频率区间是内耳和眼睛等部位的敏感频率,人体在这个频率期间产生共振易引起内耳平衡失调,恶心等不适症,因此本发明防晕车控制方法根据判断所述路面激励频率和所述车身振动响应频率是否在所述晕车敏感频率区间内,即0.1hz-0.5hz,采取相应的调整措施。
59.请参考图2,步骤s2采集路面信息和车身信息,根据所采集到的路面信息和车身信息计算路面激励频率和车身振动响应频率,具体包括:
60.s21:采集所述路面信息;所述路面信息由置于车身的雷达或摄像头采集,所述路面信息表征了路面的起伏度;
61.所述路面信息包括路面的影像、不平度、起伏度,可以通过自动驾驶系统中系统中布置在车顶、前保险杆、侧围翼子板、外后视镜、后保险杆等位置的摄像头和激光雷达等传感器采集得到。
62.s22:采集所述车身信息;所述车身信息表征了车辆的运动速度;
63.所述车身运动信息包括车身高度、速度、加速度和位移,可以通过安装在车身底部四个角落的专用传感器或自动驾驶系统中的电控悬架传感器采集得到。
64.s23:根据所述路面信息和所述车身信息,通过快速傅立叶变换得到所述路面激励频率和所述车身振动响应频率。
65.采集的所述路面信息和所述车身信息是时域的信息,通过快速傅立叶变换,可以将时域信息转换为频域信息,得到所述路面激励频率和所述车身振动响应频率。快速傅里叶变换是常见的一种数学处理方式,在此不再进行赘述。
66.得到所述路面激励频率和所述车身振动响应频率后,由步骤s3判断所述路面激励频率和/或所述车身振动响应频率是否在所述晕车敏感频率区间内;若是,则通过步骤s4进行调整,使所述路面激励频率和/或所述车身振动响应频率远离所述晕车敏感频率区间。
67.其中一种实施方式中,所述s4中的调整车速以改变所述路面激励频率具体为通过加快车速以提高所述路面激励频率,使路面激励频率远离所述晕车敏感频率区间。
68.如果所述路面激励频率在所述晕车敏感频率区间内,这时路面的状况如路面起伏等因素可能是引起晕车的主要原因,通过加快车速可以提高使路面激励频率,在本实施方式中可以通过调整电驱动的转速和扭矩调整车速。
69.其中一种实施方式中,所述s4中的调整车辆悬架刚度和阻尼以改变所述车身振动响应频率具体为通过调高车辆悬架刚度和阻尼,使车身振动响应频率远离所述晕车敏感频率区间。
70.在本实施方式中,采用的是主动悬架系统,可以根据行驶状况,通过空气悬挂的阀门或者电磁悬挂的线圈电流来调整所述悬架刚度和阻尼。车辆的悬架刚度和阻尼影响车辆的平顺性、稳定性及车身振动频率,如果所述车身振动响应频率在所述晕车敏感频率区间内,这时可以通过底盘系统调高悬架的刚度和阻尼调高车身振动响应频率。
71.晕车症状除了与车辆振动频率有关,还与车内气味和温度、乘员坐姿有强相关性。如果步骤s3中判断所述路面激励频率和/或所述车身振动响应频率是否在所述晕车敏感频率区间内的结果为否,则通过步骤s5调节乘坐环境和乘坐状态。请参考图3,其中一种实施方式中,所述s5调节乘坐环境和乘坐状态,具体包括:
72.s51:调节车窗开闭状态,改善车内新风系统;在本实施方式中,可以通过语音系统或界面选择系统征询乘员是否可以开启部分车窗;
73.s52:调节空调系统内外循环,改善车内温度以及气味;
74.在本实施方式中,可以控制空调系统调节车内温度或通过香氛系统释放出清新的气味缓解晕车症状;
75.s53:调节座椅位置及姿态。
76.在本实施方式中,可以通过调节座椅的前后位置,使座椅的位置靠近整车振动幅值最小点,来减少乘员的低频运动来改善晕车症状。
77.在步骤s6向用户确认晕车状态是否得到改善,如果用户仍有防晕车调节需求则再次通过步骤s2~s5进行调节,所述调节过程会重复进行直到用户确认晕车状态得到改善。
78.请参考图4,本发明提供的一种自动驾驶模式下的防晕车控制系统,具体包括:
79.中央处理器10,用于获取防晕车需求信息,并根据防晕车需求信息启动防晕车控制模式;
80.车身姿态和路面信息感知模块20,用于采集车身信息和路面信息,并将采集到的路面信息和车身信息发送给所述中央处理器;
81.所述中央处理器还用于根据所采集到的路面信息和车身信息计算路面激励频率和车身振动响应频率,并判断所述路面激励频率和/或车身振动响应频率是否在晕车敏感频率区间内,若是,则发送第一控制信息与第二控制信息;若否,则发送第三控制信息;
82.所述第一控制信息表征了所述路面激励频率在所述晕车敏感频率区间内,需要控制动力相关的模块以改变所述路面激励频率;所述第二控制信息表征了所述车身振动响应
频率在所述晕车敏感频率区间内,需要控制地盘相关的模块以改变车身振动响应频率;所述第三控制信息表征了当前晕车症状与车辆振动频率无关,需要通过调节其他辅助模块进行调节,如车内气味和温度、乘员坐姿等。
83.动力域控制模块30,用于在接收到所述第一控制信息后,调节电驱动的转速和扭矩来控制车速,以改变所述路面激励频率;
84.底盘域控制模块40,用于在接收到所述第二控制信息后,调节空气悬挂的阀门或者电磁悬挂的线圈电流来控制悬架刚度和阻尼,以改变所述车身振动响应频率;
85.车身域控制模块50,用于在接收到所述第三控制信息后,调节乘坐环境和乘坐状态。
86.其一种实施方式中,所述车身域控制模块50包括车窗模块51、空调模块52和座椅调节模块53。所述车窗模块51用于通过询问用户来调节车窗开闭状态,改善车内新风系统,所述空调模块52用于调节空调系统内外循环,改善车内温度以及气味,所述座椅调节模块53用于调节座椅位置及姿态。
87.所述的自动驾驶模式下的防晕车控制系统还包括语音系统61和/或模式输入系统62,所述语音系统61用于以语音方式接收防晕车需求信息;所述模式输入系统62用于提供模式选择以接收防晕车需求信息。
88.所述语音系统61和/或模式输入系统62除了接收防晕车需求信息,还可以用于一些用户交互功能,比如在中央控制器的控制下征询和接收乘员是否同意开启部分车窗的信息,以及在一次防晕车调节过程结束时,询问和接收乘员的晕车症状是否需要继续进行防晕车调节的信息。
89.作为一种实施方式,所述中央处理器为单独设置的独立控制模块。
90.作为另一种实施方式,所述中央处理器可以与所述动力域控制模块30或底盘域控制模块40或车身域控制模块50复用。具体地,可以不单独设置中央处理器,而是用动力域控制模块30或底盘域控制模块40或车身域控制模块50实现中央处理器的功能。此外,本发明实施例还提供了一种汽车,包括前述的自动驾驶模式下的防晕车控制系统。
91.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1