一种基于霍尔条的运动物体数量及速度测量方法
1.本发明属于测速、计量技术领域,涉及使用新型电子器件的测量方法,具体涉及一种基于霍尔条的计数及物体运动速度测量方法。
背景技术:
2.现有技术通过高精度的激光传感器实现运动物体的速度测量,具有测量准确的优点,在实际应用中,由于环境因素的影响,传感器的性能会有所下降,同时寿命也有所降低,因此系统成本较高。
3.霍尔条是一种通过自旋轨道转矩实现器件内部磁畴翻转,进而实现反常霍尔电阻非易失变化的自旋电子器件。具体的,霍尔条的反常霍尔电阻能在脉冲电流驱动下连续变化,其余状态下保持不变,因此霍尔条具有非易失编程、长寿命、制备简单等特点,通常将其应用在存储领域中,利用霍尔电阻承担信息存储功能。此外霍尔条还可以实现计算功能,达到存算一体的目标。
4.基于上述特点,使用霍尔条设计测量系统,可以提高系统的稳定性与可靠性,降低成本。
技术实现要素:
5.针对现有技术的不足,本发明提出了一种基于霍尔条的运动物体数量及速度测量方法,具体包括以下步骤:
6.步骤1、准备基于霍尔条的运动物体数量及速度测量装置,该装置包括传感器模块、stdp(spike timing dependent plasticity)复合算法模块、霍尔条、状态读取模块和计算模块。
7.步骤2、在所述霍尔条的输入端施加一个周期固定、且幅值大于霍尔条临界电流的脉冲调节信号,以改变霍尔条的霍尔电阻值,并记录霍尔电阻值随脉冲个数变化的规律,存储到计算模块中。
8.步骤3、再根据步骤2得到的变化规律,统计霍尔电阻值的变化随脉冲占空比的变化规律,存储到计算模块中。
9.步骤4、将所述传感器模块固定在距离已知的两点上,当检测到运动物体经过时,传感器模块输出传感器信号给stdp复合算法模块。
10.步骤5、stdp复合算法模块根据来自不同位置的传感器信号的时间差,向霍尔条的输入端施加一个对应占空比的脉冲信号。
11.步骤6、状态读取模块读取霍尔条不同时刻下的霍尔电阻值,并输入计算模块。计算模块根据霍尔电阻值的变化情况,按照步骤2、3统计的变化规律,计算得到运动物体的数量、运动速度和运动方向。
12.作为优选,还包括显示模块与存储模块,分别用于显示和存储计算模块的计算结果。
13.作为优选,所述传感器为光电传感器或霍尔传感器。
14.本发明具有以下有益效果:
15.霍尔条具有使用寿命长、制备简单等优点,本方法通过基于霍尔条的运动物体数量及速度测量装置,发挥了霍尔条稳定性高的特点,实现了运动物体的数量及速度的测量,提供了一种低成本、低功耗、高可靠性的测量方法。
附图说明
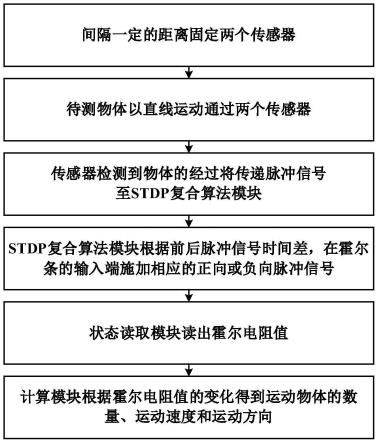
16.图1为一种基于霍尔条的运动物体数量及速度测量方法流程图;
17.图2为实施例中使用的一种基于霍尔条的运动物体数量及速度测量装置;
18.图3为实施例中霍尔条的霍尔电阻值随脉冲电流的变化关系图;
19.图4为实施例中拟合的霍尔电阻值随正向脉冲个数变化曲线;
20.图5为实施例中拟合的霍尔电阻值随负向脉冲个数变化曲线;
21.图6为实施例中拟合的霍尔电阻值随正向脉冲有效时间变化曲线;
22.图7为实施例中拟合的霍尔电阻值随负向脉冲有效时间变化曲线;
23.图8为实施例中测量的物体运动速度随霍尔电阻值变化曲线。
具体实施方式
24.为了使本发明的目的、技术方案及优点更加清楚,下面结合本发明实例中的附图,对本发明的技术方案进行进一步详细说明,自然而然,此处描述的具体实施例是发明的一部分,并不是全部实施例,以下实施例的附图详细描述仅用于说明本发明的具体的实施例,并非对本发明要求保护的范围进行限制。基于本发明的实施例,本领域普通的技术人员对实施例记载的技术方案进行无创造性进行修改,或者对其中部分技术特征进行等同替换,都属于本发明的保护范围。
25.本实施例将一种基于霍尔条的运动物体数量及速度测量方法应用于体质测试的50米短跑成绩测量中,可以自动计算参加考试的学生数量与每个学生的成绩。如图1所示,具体包括以下步骤:
26.步骤1、准备基于霍尔条的运动物体数量及速度测量装置,如图2所示,该装置包括传感器1、传感器2、stdp(spike timing dependent plasticity)复合算法模块、霍尔条、状态读取模块、计算模块、显示模块和存储模块。
27.步骤2、将所述霍尔条放置在电学测量平台上,施加一个平行于霍尔条输入端的面内辅助磁场。使用程序控制6221电流源提供一个占空比为30us、周期为1ms、幅值大于临界电流的脉冲调节信号至霍尔条输入两端,以改变霍尔电阻值。然后将该霍尔条的输入端与1个10kω的功率电阻进行串联,通过sr830数字锁相放大器向霍尔条与该电阻提供一个幅值为5v、频率为317hz的正弦波电压信号,等效于向霍尔条的输入端输入一个幅值为0.5ma、频率为317hz的正弦电流信号。将霍尔条的输出端电压与欧姆定律,即可得到霍尔条的霍尔电阻值。
28.如图3所示,在霍尔条的输入端施加连续的周期为1ms、幅值为﹢10ma、占空比为30us的正向脉冲信号,并计算对应时刻的霍尔电阻值,统计霍尔电阻值随正向脉冲个数x而下降的规律,如图4所示,并通过matlab拟合得到:
29.r_h
down
(x)=0.1385*exp(-0.246x)+0.3876*exp(-0.0006048x)
30.在霍尔条的输入端施加连续的周期为1ms、幅值为-10ma、占空比为30us的负向脉冲电流信号,并计算对应时刻的霍尔电阻值,统计霍尔电阻值随负脉冲个数y而增加的规律,如图5所示,并通过matlab拟合得到:
31.r_h
up
(y)=0.622*exp(0.001568y)-0.09067*exp(-0.2667y)
32.将上述曲线方程存储到计算模块中。
33.步骤3、如图6所示,将正向脉冲信号的占空比作为信号的有效时长t,根据图4中的曲线,通过matlab拟合霍尔电阻值随正向脉冲信号有效时长增加而减小的曲线:
34.r_h
down_t
(t)=0.1385*exp(-0.0082t)+0.3876*exp(-0.00002016t)
35.如图7所示,将负向脉冲信号的占空比作为信号的有效时长k,根据图5中的曲线,通过matlab拟合霍尔电阻值随负向脉冲信号有效时长增加而增加的曲线:
36.r_h
up_t
(k)=0.622*exp(0.00005226k)-0.09067*exp(-0.008889k)
37.同样将上述曲线方程存储到计算模块中。
38.步骤4、分别将传感器1和传感器2固定在50米短跑测量路线的起点位置和终点位置。当检测到学生经过时,传感器1、2分别输出脉冲信号给stdp复合算法模块。
39.步骤5、stdp复合算法模块根据接收到传感器1、2信号的时间差,向霍尔条的输入端施加一个对应占空比的脉冲信号。
40.步骤6、状态读取模块读取霍尔条不同时刻下的霍尔电阻值r_h0、r_h1、..r_hn,并输入计算模块。计算模块根据霍尔电阻值的变化情况,代入步骤2、3拟合的曲线方程中计算得到运动物体的数量、运动速度和运动方向。
41.(1)当r_h0>r_hn,霍尔电阻值随脉冲个数和有效时长增加而下降,代入曲线和r_h
down_t
(t):
[0042][0043][0044]
其中,n=1,2,3,...n,x0、xn分别表示霍尔电阻值为r_h0、r_hn时对应的正向脉冲电流个数,t(n-1)、tn分别为表示霍尔电阻值为r_h
n-1
、r_hn时对应的正向脉冲电流有效作用时间,测试人员的数量为xn-x0,第n-1名测试人员的速度为50/(tn-t(n-1)),如图8所示。
[0045]
(2)当r_h0<r_hn,霍尔电阻值随脉冲个数和有效时长增加而增加,代入曲线r_h
up
(y)和r_h
up_t
(k):
[0046][0047][0048]
其中,y0、yn分别表示霍尔电阻值为r_h0、r_hn时对应的负向脉冲电流个数,k(n-1)、kn分别为表示霍尔电阻值为r_h
n-1
、r_hn时对应的负向脉冲电流有效作用时间,测试人员的数量为yn-y0,第n-1名测试人员的速度为50/(kn-k(n-1))。
[0049]
步骤7、显示模块和存储模块接收并显示、存储计算模块的计算结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1