一种轨迹确定方法及装置与流程
本技术涉及定位领域,尤其涉及一种轨迹确定方法及装置。
背景技术:
1、卫星信号受遮挡会影响全球导航卫星系统gnss的定位精度。在卫星信号有遮挡的情况下,车辆常采用组合导航的方式进行导航定位,例如,将惯性测量单元imu和gnss进行组合导航,以提高车辆在卫星信号遮挡场景下的定位精度。
2、但在复杂城市道路环境下,可能出现一段区域内卫星信号都存在遮挡,导致车辆出现长时间gnss测量异常现象,但车辆在求解轨迹时由于识别不出gnss输出的存在偏差的测量值,导致获得的轨迹的精度低。
技术实现思路
1、本技术公开了一种轨迹确定方法和装置,能够在卫星信号遮挡导致gnss测量长时间异常的情况下能有效识别出异常的gnss测量值,提高了求解的轨迹的精准度。
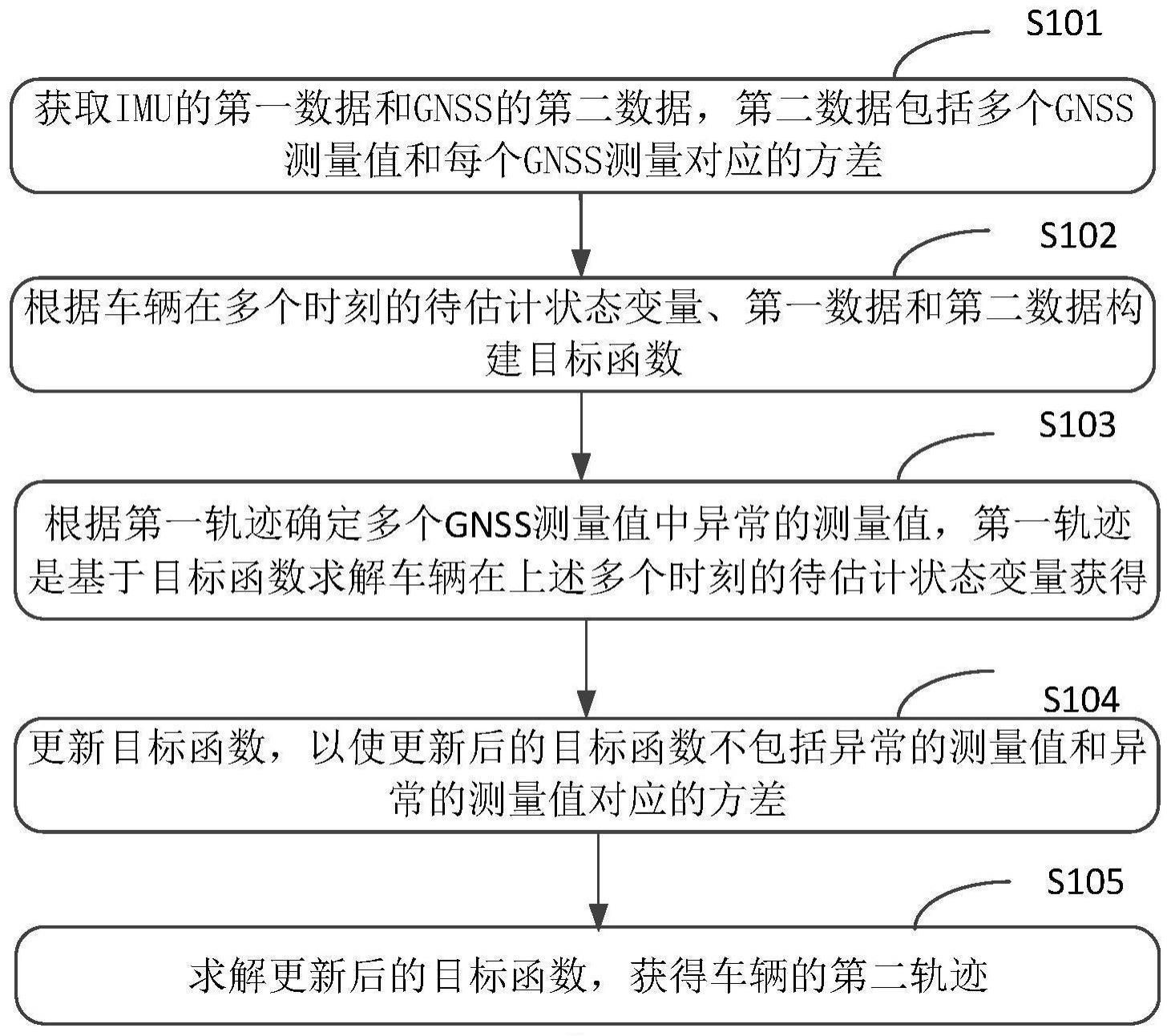
2、第一方面,本技术提供了一种轨迹确定方法,该方法包括:根据车辆在多个时刻的待估计状态变量、惯性测量单元imu的第一数据和全球导航卫星系统gnss的第二数据构建目标函数,第二数据包括多个gnss测量值和每个gnss测量值对应的方差;根据第一轨迹确定这多个gnss测量值中异常的测量值,第一轨迹是基于目标函数求解车辆在多个时刻的待估计状态变量获得;更新目标函数,以使更新后的目标函数不包括异常的测量值和异常的测量值对应的方差;求解更新后的目标函数,获得车辆的第二轨迹。
3、上述方法可以应用于车辆、或者车辆内的装置、部件或芯片等,例如,车载电脑、车载工业控制计算机(industrial personal computer,ipc)等。
4、其中,车辆在多个时刻的待估计状态变量是需要求解出的变量。车辆在某时刻的待估计状态变量包括车辆在该时刻的待估计位置变量。一种实现方式中,车辆在某时刻的待估计状态变量还包括车辆在该时刻的待估计速度变量和车辆在该时刻的待估计姿态变量。
5、第二数据源于gnss。一种实现方式中,第二数据中的多个gnss测量值可以是gnss在预设时间段内采集到的多个gnss测量值。另一种实现方式中,第二数据中的多个gnss测量值也可以是车辆从gnss在预设时间段内采集到的各个gnss测量值中筛选获得的。
6、上述方式中,通过基于构建的目标函数求解出的第一轨迹,识别出参于该目标函数构建的多个gnss测量值中异常的测量值,根据识别出的异常的测量值更新目标函数,再基于更新后的目标函数重新求解车辆的轨迹,如此,实现了求解的轨迹的优化,提高了求解的轨迹的精准度。
7、可选地,目标函数包括每个gnss测量值对应的gnss因子,更新目标函数,包括:删除目标函数中异常的测量值对应的gnss因子。
8、其中,异常的测量值即为异常的gnss测量值。
9、可以理解,目标函数更新之前,第二数据中的多个gnss测量值中的每个gnss测量值均以gnss因子的方式参与了目标函数的构建,当从这多个gnss测量值中确定了异常的测量值后,经过目标函数的更新操作,异常的测量值对应的gnss因子不再参与目标函数的构建,意味着异常的测量值也不再参与该目标函数的构建。如此,有效提高了构建的目标函数的准确率,有利于提高求解的轨迹的精准率。
10、可选地,第二数据包括第一时刻采集的第一gnss测量值和第一gnss测量值对应的第一方差,车辆在第一时刻的待估计状态变量包括车辆在第一时刻的待估计位置变量,第一gnss测量值对应的gnss因子是根据待估计位置变量、第一gnss测量值和第一方差获得。
11、实施上述实现方式,gnss因子的构建引入gnss测量值对应的方差,有利于提高组合导航定位场景下求解的轨迹的精准度。
12、可选地,第一gnss测量值对应的gnss因子还包括第一gnss测量值对应的方差调整参数,第二数据还包括第二gnss测量值,第二gnss测量值为第一gnss测量值的前一个相邻的测量值,方差调整参数为第一gnss测量值与第二gnss测量值之间车辆的行驶距离与第一距离的比值。
13、其中,第一距离用于指示gnss的可控制范围。在复杂城市道路环境中,车辆的gnss接收到的卫星信号可能为经过高楼、树木等环境中目标体多次反射后的卫星信号,也就是说,gnss接收到的卫星信号是存在误差的,在车辆的位置信息的变化量小于第一距离时,认为车辆上的gnss接收到的卫星信号存在的误差是相同的。
14、实施上述实现方式,通过方差调整参数对gnss测量值的方差进行调整,并基于gnss测量值调整后的方差构建gnss测量值对应的gnss因子,有利于提高求解的轨迹的精准度。
15、可选地,第一gnss测量值对应的gnss因子还包括第一gnss测量值对应的方差调整参数,方差调整参数是根据车辆在第一时刻的行驶速度、gnss的采样频率和第一距离确定。
16、其中,gnss的采样频率也可以称作gnss的更新频率,通过gnss的采样频率可以知晓gnss相邻两次采集之间的时间间隔。有关第一距离可参考上述第一距离的相关叙述。实施上述实现方式,通过方差调整参数能提高构建的目标函数的准确度,有利于实现车辆轨迹的准确求解。可选地,多个gnss测量值中任意两个相邻的gnss测量值之间车辆的行驶距离为第二距离。
17、一种实现方式中,第二距离小于等于上述第一距离。
18、在一些可能的实施例中,对多个gnss测量值的选取的限制还可以与上述两种方差调整参数的任意一种结合使用,例如,构建的目标函数中的gnss因子包括上述方差调整参数,且用于构建目标函数的多个gnss测量值满足这多个gnss测量中任意两个相邻的gnss测量值之间车辆的行驶距离为第二距离。
19、实施上述实现方式,多个gnss测量可以基于车辆的行驶轨迹以固定长度进行选取,使得选取的多个gnss测量值在车辆的行驶轨迹上尽可能均匀分布,使得基于这多个gnss测量值构建的目标函数更加准确,有利于提高求解的轨迹的精准度。
20、可选地,多个gnss测量值中的任意一gnss测量值满足以下条件中的至少一项:
21、gnss测量值是固定解;和
22、gnss测量值指示的位置处的可观测卫星颗数超过预设阈值。
23、其中,gnss测量值为固定解时的定位精度(或定位质量)要好于gnss测量值为非固定解时的定位精度(或定位质量),gnss测量值为固定解是指基于载波相位计算出该gnss测量值时对应的模糊度为整数。
24、gnss测量值指示的位置处的可观测卫星颗数越多,即说明该gnss测量值的采集处的卫星信号越好,该gnss测量值的定位质量越好。
25、在一种实现方式中,多个gnss测量值是从车辆的多段长度相同的轨迹中选取的,这多段轨迹是基于车辆的行驶轨迹进行均匀划分获得的,多个gnss测量值包括从这多段轨迹中的每段轨迹中选取的至少一个gnss测量值,每段轨迹中选取的gnss测量值满足以下条件中的至少一个:
26、gnss测量值是固定解;
27、gnss测量值指示的位置处的可观测卫星颗数超过预设阈值;和
28、gnss测量值指示的位置处的可观测卫星颗数在该段轨迹中最多。
29、在一些可能的实施例中,上述对多个gnss测量值的限制条件还可以与上述两种方差调整参数的任意一种结合使用,在此不作具体限定。
30、实施上述实现方式,使用定位质量较好的gnss测量值用于目标函数的构建,能提高构建的目标函数的准确率,有利于提高基于该目标函数求解的车辆轨迹的精准度。
31、可选地,第三gnss测量值为多个gnss测量值中的任意一个,第一轨迹包括车辆在多个时刻的待估计位置信息,根据第一轨迹确定多个gnss测量值中异常的测量值,包括:根据第三gnss测量值的采集时刻,查找获得第一轨迹中第三gnss测量值对应的第一待估计位置信息;在第三gnss测量值与第一待估计位置信息的差值与第三gnss测量值对应的方差的比值超过第一阈值时,确定第三gnss测量值为异常的测量值。
32、实施上述实现方式,基于求解出的轨迹中gnss测量值对应的待估计位置信息与该gnss测量值之间的误差,判断该gnss测量值是否异常,如此,可以识别出参与目标函数构建的gnss测量值中异常的测量值,方便后续从目标函数中剔除该异常的测量值对应的gnss因子,有利于提高目标函数的准确率以及求解的轨迹的精准度。
33、可选地,该方法还包括:根据第二轨迹确定更新后的目标函数中的任一gnss测量值无异常;将第二轨迹作为车辆的最优轨迹。
34、也就是说,在根据第二轨迹确定更新后的目标函数中的任一gnss测量值无异常的情况下,将第二轨迹作为车辆的最优轨迹。
35、实施上述实现方式,有效提高了求解的轨迹的精准度,在卫星信号遮挡导致gnss测量长时间异常的情况下能提高车辆的定位精度。
36、第二方面,本技术提供了一种轨迹确定装置,该装置包括:函数处理单元,用于根据车辆在多个时刻的待估计状态变量、惯性测量单元imu的第一数据和全球导航卫星系统gnss的第二数据构建目标函数,第二数据包括多个gnss测量值和每个gnss测量值对应的方差;异常检测单元,用于根据第一轨迹确定多个gnss测量值中异常的测量值,第一轨迹是基于目标函数求解车辆在多个时刻的待估计状态变量获得;函数处理单元还用于更新目标函数,以使更新后的目标函数不包括异常的测量值和异常的测量值对应的方差;轨迹获取单元,用于求解更新后的目标函数,获得车辆的第二轨迹。
37、可选地,目标函数包括每个gnss测量值对应的gnss因子,函数处理单元,具体用于:删除目标函数中异常的测量值对应的gnss因子。
38、可选地,第二数据包括第一时刻采集的第一gnss测量值和第一gnss测量值对应的第一方差,车辆在第一时刻的待估计状态变量包括车辆在第一时刻的待估计位置变量,第一gnss测量值对应的gnss因子是根据待估计位置变量、第一gnss测量值和第一方差获得。
39、可选地,第一gnss测量值对应的gnss因子还包括第一gnss测量值对应的方差调整参数,第二数据还包括第二gnss测量值,第二gnss测量值为第一gnss测量值的前一个相邻的测量值,方差调整参数为第一gnss测量值与第二gnss测量值之间车辆的行驶距离与第一距离的比值。
40、可选地,第一gnss测量值对应的gnss因子还包括第一gnss测量值对应的方差调整参数,方差调整参数是根据车辆在第一时刻的行驶速度、gnss的采样频率和第一距离确定。
41、可选地,多个gnss测量值中任意两个相邻的gnss测量值之间车辆的行驶距离为第二距离。
42、可选地,多个gnss测量值中的任意一gnss测量值满足以下条件中的至少一项:
43、gnss测量值是固定解;和
44、gnss测量值指示的位置处的可观测卫星颗数超过预设阈值。
45、在一种实现方式中,多个gnss测量值是从车辆的多段长度相同的轨迹中选取的,这多段轨迹是基于车辆的行驶轨迹进行均匀划分获得的,多个gnss测量值包括从这多段轨迹中的每段轨迹中选取的至少一个gnss测量值,每段轨迹中选取的gnss测量值满足以下条件中的至少一个:
46、gnss测量值是固定解;
47、gnss测量值指示的位置处的可观测卫星颗数超过预设阈值;和
48、gnss测量值指示的位置处的可观测卫星颗数在该段轨迹中最多。
49、可选地,第三gnss测量值为多个gnss测量值中的任意一个,第一轨迹包括车辆在多个时刻的待估计位置信息,异常检测单元,具体用于:根据第三gnss测量值的采集时刻,查找获得第一轨迹中第三gnss测量值对应的第一待估计位置信息;在第三gnss测量值与第一待估计位置信息的差值与第三gnss测量值对应的方差的比值超过第一阈值时,确定第三gnss测量值为异常的测量值。
50、可选地,异常检测单元用于根据第二轨迹确定更新后的目标函数中的任一gnss测量值无异常;轨迹获取单元用于将第二轨迹作为车辆的最优轨迹。
51、第三方面,本技术提供了一种轨迹确定装置,该装置包括处理器和存储器,其中,存储器用于存储程序指令;所述处理器调用所述存储器中的程序指令,使得装置执行第一方面或者第一方面的任一可能的实现方式中的方法。
52、第四方面,本技术提供了一种计算机可读存储介质,包括计算机指令,当所述计算机指令在被处理器运行时,实现上述第一方面或者第一方面的任一可能的实现方式中的方法。
53、第五方面,本技术提供了一种计算机程序产品,当该计算机程序产品被处理器执行时,实现上述第一方面或者第一方面的任一可能的实施例中的所述方法。该计算机程序产品,例如可以为一个软件安装包,在需要使用上述第一方面的任一种可能的设计提供的方法的情况下,可以下载该计算机程序产品并在处理器上执行该计算机程序产品,以实现第一方面或者第一方面的任一可能的实施例中的所述方法。
54、第六方面,本技术提供了一种车辆,该车辆包括如上述第二方面或第二方面的任一可能的实现方式的轨迹确定装置,或者包括如上述第三方面或者第三方面的任一可能的轨迹确定装置。
55、上述第二方面至第六方面的技术效果与上述第一方面相同,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!