一种门跨式差异沉降自动化测量系统的制作方法
1.本发明涉及测量技术领域,尤其涉及一种门跨式差异沉降自动化测量系统。
背景技术:
2.如今测量在施工中的后浇带两侧的基础底板的差异沉降值时,一般采用水准仪或者全站仪,需要在无沉降的位置对两侧沉降平台分别测量高程并分析高程数据,这就占用了测量人员的大量时间,而且限制了一天的监测次数,给施工带来诸多不便,甚至很多时候,沉降平台是否沉降稳定主要通过工人的经验判断,但对于不同的底板平台,由于地质条件的不同,受到的负载不同,气候不同,导致通过经验判断进入下一步施工工序的期限并不准确,有时不需等待却依旧进行等待,延长了工期,有时需要等待却未等待,提早浇注后浇带会造成潜在的安全隐患。
3.中国专利公开号:cn211079847u。公开了一种用于差异沉降的测量装置,包括:左连接板,连接第一路基;右连接板,连接第二路基;测量装置本体,连接所述左连接板与所述右连接板,且所述测量装置本体测量有关差异沉降值的数据;通讯装置,发送有关差异沉降值的数据;服务器,接收并显示有关差异沉降值数据。专利cn211079847u通过所述测量装置本体测量有关差异沉降值的数据,再将有关差异沉降值的数据实时发送至后台服务器,后台服务器实时分析该数据并得出差异沉降值;由此可见,目前本行业,存在以下问题:
4.人为监测两侧沉降平台的差异沉降值费时费力,并且测量精度较低。
技术实现要素:
5.为此,本发明提供一种门跨式差异沉降自动化测量系统,用以克服现有技术中花费时间久且测量精度低的问题。
6.为实现上述目的,本发明提供一种门跨式差异沉降自动化测量系统,包括,
7.垫板组件,包含第一垫板和第二垫板,所述第一垫板和所述第二垫板设置在不同的沉降平台上;
8.支撑组件,其设置在所述垫板组件的上方,为刚性结构;所述支撑组件包括第一支撑杆和第二支撑杆,所述第一支撑杆设置在所述第一垫板上,所述第二支撑杆设置在所述第二垫板上,两个支撑杆中一个为拐杆,另一个为立杆或拐杆;
9.测距组件,其设置在所述支撑组件上,所述测距组件包括测距传感器和接收板,所述测距传感器固定在拐杆伸向另一侧沉降平台的横杆上,所述接收板设置在另一个支撑杆上,且测距传感器与接收板上下正对;测距组件能够测量测距传感器和接收板的垂直距离;
10.数据传输组件,其与所述测距传感器相连,能通过所述数据传输组件传输所述测距组件检测到的测距传感器和所述接收板的垂直距离数据;
11.软件平台,其与所述数据传输组件无线连接,能够接收数据传输组件传输的所述垂直距离数据,并通过对所述垂直距离数据进行分析,判断两侧沉降平台的相对沉降情况,并根据相对沉降情况判定两侧沉降平台间的沉降是否平稳。
12.所述支撑组件包括,设置在所述第一垫板上的所述第一支撑杆和所述第二垫板上的所述第二支撑杆,当第一支撑杆为拐杆且第二支撑杆为直杆时,
13.测距传感器安装在拐杆伸向第二垫板所在沉降平台的横杆上,且接收板安装在直杆上时,测距传感器的激光发射口垂直向下,且正对接收板;
14.测距传感器安装在直杆上,且接收板安装在伸向第二垫板所在沉降平台的横杆上时,测距传感器的激光发射口垂直向上,且正对接收板;
15.当第一支撑杆为拐杆且第二支撑杆也为拐杆时,
16.测距传感器安装在第一支撑杆伸向第二垫板所在沉降平台的横杆上,且第一支撑杆的横杆比第二支撑杆的横杆高时,测距传感器的激光发射口垂直向下,且正对接收板,接收板安装在第二支撑杆伸向第一垫板所在沉降平台的横杆上;
17.测距传感器安装在第一支撑杆伸向第二垫板所在沉降平台的横杆上,且第一支撑杆的横杆比第二支撑杆的横杆低时,测距传感器的激光发射口垂直向上,且正对接收板,接收板安装在第二支撑杆伸向第一垫板所在沉降平台的横杆上;
18.当第一支撑杆为直杆且第二支撑杆为拐杆时,
19.测距传感器安装在直杆上,且接收板安装在伸向第一垫板所在沉降平台的横杆上时,测距传感器的激光发射口垂直向上,且正对接收板;
20.测距传感器安装在拐杆伸向第一垫板所在沉降平台的横杆上,且接收板安装在直杆上时,测距传感器的激光发射口垂直向下,且正对接收板。
21.所述数据传输组件包括,与所述测距传感器相连的数据发送模块,与所述软件平台相连的数据接收模块,数据发送模块与数据接收模块之间无线传输测距传感器与接收板间的垂直距离d数据。
22.所述软件平台,是接收所述数据传输组件传输的测距传感器与接收板间垂直距离d数据的终端,终端的形式不限定为电脑,包含存贮、分析和报警的功能。
23.当采用所述自动化测量系统前,通过所述支撑组件将测距组件安装牢固,使测距传感器正对接收板,启动所有电子设备开始对差异沉降值记录。
24.进一步地,所述软件平台内设置有所述垂直距离数据检测间隔时长t,每经过检测间隔时长t时,所述测距传感器检测与所述接收板间的垂直距离d,并将检测结果通过所述数据传输组件传递至所述软件平台,所述软件平台对每次检测的数据进行整合,生成距离波动曲线dt,距离波动曲线dt纵坐标为所述测距传感器与所述接收板间的垂直距离d,横坐标为检测记录总时长。
25.进一步地所述软件平台有标准分析时长t,软件平台检测记录总时长为tz,并将tz与标准分析时长t进行对比,
26.当tz<t时,所述软件平台不对距离波动曲线dt进行数据分析;
27.当tz≥t时,所述软件平台对距离波动曲线dt进行数据分析,判断在标准分析时长t内两侧沉降平台之间的沉降情况。
28.进一步地,当所述软件平台对距离波动曲线dt进行数据分析时,软件平台获取标准分析时长t内的两侧沉降平台之间的差异沉降值,并对差异沉降值进行判断:
29.当差异沉降值在预设范围内,所述软件平台判定两侧沉降平台之间的沉降趋于稳定;
30.当差异沉降值不在预设范围内,所述软件平台判定两侧沉降平台之间的沉降未稳定,所述测距组件继续检测两侧沉降平台之间的沉降情况,每当软件平台获取到新的垂直距离d时,软件平台对距离波动曲线dt的第一个坐标点含弃,并将最新检测的距离d补充至距离波动曲线dt,使得距离波动曲线dt横坐标长度恒为t。
31.进一步地,所述软件平台设置有标准差异沉降值ds,当所述软件平台对距离波动曲线dt进行数据分析时,所述软件平台获取距离波动曲线dt上的纵坐标最大值dmax与纵坐标最小值dmin,软件平台计算距离波动曲线dt的波动范围差值dn,dn=|dmax-dmin|,
32.当dn≤ds,所述软件平台判定两侧沉降平台的沉降已经趋于稳定,停止对所述垂直距离d的检测,并由软件平台发出合格报告;
33.当dn>ds,所述软件平台判定两侧沉降平台的沉降未稳定,继续进行下一轮所述垂直距离d的检测及传输;
34.每当有新的垂直距离d数据存入,所述软件平台对距离波动曲线dt进行一次差异沉降值的合格判定。
35.与现有技术相比,本发明的有益效果在于,本发明通过机器监测两侧沉降平台的差异沉降值进行稳定性分析,节省了人力,提高了检测精度,同时避免了根据经验施工,既防止延长工期,又防止提前施工形成安全隐患,指导科学施工。
36.进一步地,采用所述测距传感器,用机器代替人为,提高了测量仪器的测量精度,减少了人为误差,减轻了施工现场测量人员的工作负担。
37.进一步地,预设软件平台内所述测距传感器与接收板间垂直距离的数据检测间隔时长,提高了检测频率,充实了所述距离波动曲线。
附图说明
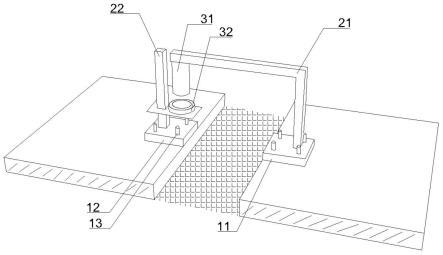
38.图1为本发明实施例中第一支撑杆为拐杆,第二支撑杆为直杆的门跨式差异沉降自动化测量系统结构示意图;
39.图2为本发明实施例中第一支撑杆为拐杆,第二支撑杆也为拐杆的门跨式差异沉降自动化测量系统结构示意图;
40.图3为本发明实施例中第一支撑杆为直杆,第二支撑杆为拐杆的门跨式差异沉降自动化测量系统结构示意图。
具体实施方式
41.为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
42.下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
43.需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
44.此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安
装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
45.实施例一
46.请参阅图1所示,其为本发明实施例中第一支撑杆为拐杆,第二支撑杆为直杆的门跨式差异沉降自动化测量系统结构示意图,
47.公布了一种带直驱液下泵的泥浆提升装置,包括,
48.垫板组件,包含第一垫板11和第二垫板12,所述第一垫板11和所述第二垫板12设置在不同的沉降平台上;
49.支撑组件,其设置在所述垫板组件的上方,为刚性结构;所述支撑组件包括拐杆21和直杆22,所述拐杆21设置在所述第一垫板上11,所述直杆22设置在所述第二垫板上12;
50.测距组件,其设置在所述支撑组件上,所述测距组件包括测距传感器31和接收板32,所述测距传感器31固定在拐杆21伸向另一侧沉降平台的横杆上,所述接收板32设置在直杆22上,且测距传感器31与接收板32上下正对;测距组件能够测量测距传感器31和接收板32的垂直距离;
51.数据传输组件,其与所述测距传感器31相连,能通过所述数据传输组件传输所述测距组件检测到的测距传感器31和所述接收板32的垂直距离数据;
52.软件平台,其与所述数据传输组件无线连接,能够接收数据传输组件传输的所述垂直距离数据,并通过对所述垂直距离数据进行分析,判断两侧沉降平台的相对沉降情况,并根据相对沉降情况判定两侧沉降平台间的沉降是否平稳。
53.实施例二
54.请参阅图2所示,其为本发明实施例中第一支撑杆为拐杆,第二支撑杆也为拐杆的门跨式差异沉降自动化测量系统结构示意图,
55.公布了一种带直驱液下泵的泥浆提升装置,包括,
56.垫板组件,包含第一垫板11和第二垫板12,所述第一垫板11和所述第二垫板12设置在不同的沉降平台上;
57.支撑组件,其设置在所述垫板组件的上方,为刚性结构;所述支撑组件包括拐杆21和拐杆22,所述拐杆21设置在所述第一垫板上11,所述拐杆22设置在所述第二垫板上12;
58.测距组件,其设置在所述支撑组件上,所述测距组件包括测距传感器31和接收板32,所述测距传感器31固定在拐杆21伸向另一侧沉降平台的横杆上,所述接收板32设置在拐杆22伸向另一侧沉降平台的横杆上上,且测距传感器31与接收板32上下正对;测距组件能够测量测距传感器31和接收板32的垂直距离;
59.数据传输组件,其与所述测距传感器31相连,能通过所述数据传输组件传输所述测距组件检测到的测距传感器31和所述接收板32的垂直距离数据;
60.软件平台,其与所述数据传输组件无线连接,能够接收数据传输组件传输的所述垂直距离数据,并通过对所述垂直距离数据进行分析,判断两侧沉降平台的相对沉降情况,并根据相对沉降情况判定两侧沉降平台间的沉降是否平稳。
61.实施例三
62.请参阅图3所示,其为本发明实施例中第一支撑杆为直杆,第二支撑杆为拐杆的门跨式差异沉降自动化测量系统结构示意图,
63.公布了一种带直驱液下泵的泥浆提升装置,包括,
64.垫板组件,包含第一垫板11和第二垫板12,所述第一垫板11和所述第二垫板12设置在不同的沉降平台上;
65.支撑组件,其设置在所述垫板组件的上方,为刚性结构;所述支撑组件包括直杆21和拐杆22,所述直杆21设置在所述第一垫板上11,所述拐杆22设置在所述第二垫板上12;
66.测距组件,其设置在所述支撑组件上,所述测距组件包括测距传感器31和接收板32,所述接收板32设置在直杆21上,所述测距传感器31固定在拐杆22伸向另一侧沉降平台的横杆上,且测距传感器31与接收板32上下正对;测距组件能够测量测距传感器31和接收板32的垂直距离;
67.数据传输组件,其与所述测距传感器31相连,能通过所述数据传输组件传输所述测距组件检测到的测距传感器31和所述接收板32的垂直距离数据;
68.软件平台,其与所述数据传输组件无线连接,能够接收数据传输组件传输的所述垂直距离数据,并通过对所述垂直距离数据进行分析,判断两侧沉降平台的相对沉降情况,并根据相对沉降情况判定两侧沉降平台间的沉降是否平稳。
69.本发明通过机器监测两侧沉降平台的差异沉降值进行稳定性分析,节省了人力,提高了检测精度,同时避免了根据经验施工,既防止延长工期,又防止提前施工形成安全隐患,科学施工。
70.具体而言,所述的门跨式差异沉降自动化测量系统,其特征在于,所述软件平台内设置有所述垂直距离数据检测间隔时长t,每经过检测间隔时长t时,所述测距传感器检测与所述接收板间的垂直距离d,并将检测结果通过所述数据传输组件传递至所述软件平台,所述软件平台对每次检测的数据进行整合,生成距离波动曲线dt,距离波动曲线dt纵坐标为所述测距传感器与所述接收板间的垂直距离d,横坐标为检测记录总时长。
71.具体而言,所述软件平台有标准分析时长t,软件平台检测记录总时长为tz,并将tz与标准分析时长t进行对比,
72.当tz<t时,所述软件平台不对距离波动曲线dt进行数据分析;
73.当tz≥t时,所述软件平台对距离波动曲线dt进行数据分析,判断在标准分析时长t内两侧沉降平台之间的沉降情况。
74.具体而言,当所述软件平台对距离波动曲线dt进行数据分析时,软件平台获取标准分析时长t内的两侧沉降平台之间的差异沉降值,并对差异沉降值进行判断:
75.当差异沉降值在预设范围内,所述软件平台判定两侧沉降平台之间的沉降趋于稳定;
76.当差异沉降值不在预设范围内,所述软件平台判定两侧沉降平台之间的沉降未稳定,所述测距组件继续检测两侧沉降平台之间的沉降情况,每当软件平台获取到新的垂直距离d时,软件平台对距离波动曲线dt的第一个坐标点含弃,并将最新检测的距离d补充至距离波动曲线dt,使得距离波动曲线dt横坐标长度恒为t。
77.具体而言,所述软件平台设置有标准差异沉降值ds,当所述软件平台对距离波动曲线dt进行数据分析时,所述软件平台获取距离波动曲线dt上的纵坐标最大值dmax与纵坐
标最小值dmin,软件平台计算距离波动曲线dt的波动范围差值dn,dn=dmax-dmin,
78.当dn≤ds,所述软件平台判定两侧沉降平台的沉降已经趋于稳定,停止对所述垂直距离d的检测,并由软件平台发出合格报告;
79.当dn>ds,所述软件平台判定两侧沉降平台的沉降未稳定,继续进行下一轮所述垂直距离d的检测及传输;
80.每当有新的垂直距离d数据存入,所述软件平台对距离波动曲线dt进行一次差异沉降值的合格判定。
81.具体而言,所述数据传输组件包括,与所述测距传感器相连的数据发送模块,与所述软件平台相连的数据接收模块,数据发送模块与数据接收模块之间无线传输测距传感器与接收板间的垂直距离d数据。
82.具体而言,所述软件平台,是接收所述数据传输组件传输的测距传感器与接收板间垂直距离d数据的终端,终端的形式为电脑、平板和手机这一类屏显计算设备,包含存贮、分析和报警的功能。
83.举例计算,在本发明各实时例中,t=1day,t=100day,ds=2mm,
84.当dt曲线累计产生100个坐标点,开始计算dt曲线上dmax与dmin之差,并与ds=2mm比较:
85.dmax-dmin>2mm,继续检测d数据,每当上传新的d数据,删除dt曲线上的第一个坐标点;
86.dmax-dmin≤2mm,停止检测d数据,监测平台输出合格报告。
87.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1