一种基于加速度计制导的EMI骚扰功率检测设备及方法
一种基于加速度计制导的emi骚扰功率检测设备及方法
技术领域
1.本发明涉及emi(electro magnetic interference,电磁干扰)检测技术领域,特别是涉及一种基于加速度计制导的emi骚扰功率检测设备及方法。
背景技术:
2.家用电器、电动工具和类似器具产品在存在电源线或连接线的天线辐射效应。质检中心按照质检测试标准,在产品出厂前对该产品进行emi骚扰功率测试,检测该产品是否达到质检的标准。
3.现有常用骚扰功率检测设备组成的测试系统如图1所示,其包含一0.8m高的非金属测试台10、吸收钳20、测量接收机30、连接吸收钳和测量接收机的测量电线40、用于悬挂测量电线的铁氧环体组件50、用于支撑吸收钳移动的吸收钳导轨60和用于支撑铁氧环体移动的测量电线导轨70,其中,20、30、40为检测设备,10、50、60、70为用于支撑和移动的机构部件。测试设备进行骚扰功率测试时,待测产品的电源线或连接线作为被测设备,平铺在高0.8m的非金属测试台10上,测试设备的吸收钳20在吸收钳导轨60上来回移动,检测被测设备的骚扰信号功率的频率及其波峰,测量接收机30记录测试数据。吸收钳20与测量接收机30通过测量电线40连接,测量电线40通过铁氧环体组件50之一铁氧环体吊起并用另一过铁氧环体组件50之另一铁氧环体悬挂于上部的测量电线导轨70上,吸收钳20与铁氧环体组件50之间的测量电线段与吸收钳导轨60保持垂直,以保证测试结果的准确。该测试设备采用吸收钳20带动铁氧环体50移动,由于吸收钳20与铁氧体环组件50两部分之间的不同步,导致吸收钳20与铁氧环体组件50之间的测量电线段与吸收钳导轨60发生倾斜,且倾斜的角度存在变化,使得测试结果发生变化。
技术实现要素:
4.为克服上述现有技术存在的不足,本发明之目的在于提供一种基于加速度计制导的emi骚扰功率检测设备及方法,通过采用加速度计制导设备带动铁氧环体,在吸收钳移动过程中,加速度计模块捕捉测量电线与吸收钳之间加速度值的变化,mcu根据加速度计模块反馈测量导轨方向的加速度值驱动步进电机带动铁氧环体,补偿测量电线的倾斜角度,降低因铁氧环体与吸收钳之间用于连接的测量电线倾斜导致的测量误差。
5.为达上述及其它目的,本发明提出一种基于加速度计制导的emi骚扰功率检测设备,铺设于测试台(10)用于支撑吸收钳(20)移动的吸收钳导轨(60)、置放于所述吸收钳导轨(60)上的吸收钳(20)、平行且面向所述吸收钳导轨(60)设置于所述吸收钳导轨(60)上方的测量电线导轨(70)以及与所述吸收钳(20)通过测量电线(40)连接的测量接收机(30),其特征在于,所述emi骚扰功率检测设备还包括加速度计制导设备(90),其主体正对所述吸收钳(20)安装在所述测量电线导轨(70)上,其加速度计模块设置于所述吸收钳(20)与主体之间的测量电线上,以测量该处的加速度值并返回给所述加速度计制导设备(90)主体,以根据所述加速度计模块返回的加速度值输出相应的控制信号,使所述加速度计制导设备主
体、测量电线(40)、吸收钳(20)同步移动。
6.优选地,所述测量电线(40)通过铁氧环体组件(50)的铁氧环体吊起并固定悬挂于所述加速度计制导设备(90)下方,且所述吸收钳(20)与铁氧环体组件(50)之间的测量电线段与吸收钳导轨(60)保持垂直。
7.优选地,所述铁氧环体组件(50)固定在加速度计制导设备(90)主体的外壳上。
8.优选地,所述加速度计制导设备包括:
9.微处理器模块,用于接收加速度计模块发送的加速度值,根据接收的数据计算出步进电机单位时间内旋转的角度与方向,并输出控制信号控制步进电机的进退与快慢,使其与所述吸收钳(20)同步,保持所述吸收钳(20)与铁氧环体组件(50)之间的测量电线段的垂直状态;
10.加速度计模块,用于实时获取安装位置的加速度值,并反馈给所述微处理器模块;
11.步进电机驱动器,用于将所述微处理器模块输出的控制信号予以放大以驱动步进电机运动;
12.步进电机,用于在所述微处理器模块输出的控制信号的控制下带动测量电线(40)与吸收钳(20)同步移动以保持吸收钳(20)与铁氧环体组件(50)之间的测量电线段与吸收钳导轨(60)垂直。
13.优选地,所述微处理器模块通过pid闭环控制算法计算出所述步进电机单位时间内旋转的角度与方向,进而控制所述步进电机的工作。
14.优选地,所述加速度计模块包括加速度传感器芯片及其外围电路,用于获取安装位置的加速度值并通过i2c接口反馈给所述微处理器模块。
15.优选地,所述加速度传感器芯片通过i2c总线与所述微处理器模块的微处理器相连;所述微处理器的三个通用输入输出口分别连接至所述步进电机驱动器的许可端ena、方向控制端dir和驱动输入端pul,所述步进电机驱动器的输出端连接所述步进电机。
16.优选地,所述步进电机通过机械结构安装在所述测量电线导轨(70)上。
17.为达到上述目的,本发明还提供一种基于加速度计制导的emi骚扰功率检测方法,包括如下步骤:
18.步骤s1,利用设置于吸收钳与铁氧环体组件之间的测量电线段上的加速度计模块实时测量该处的加速度值;
19.步骤s2,根据加速度计模块实时测量的数据,计算出步进电机单位时间内旋转的角度与方向,以输出控制信号控制步进电机的进退与快慢,使其与吸收钳同步,保持吸收钳与铁氧环体组件之间的测量电线段的垂直状态。
20.优选地,于步骤s2中,通过pid闭环控制算法计算出所述步进电机单位时间内的旋转角度,进而控制所述步进电机的工作。
21.与现有技术相比,本发明一种基于加速度计制导的emi骚扰功率检测设备及方法针对测量电线倾斜带来的测试误差,通过采用加速度计制导设备带动铁氧环体,在吸收钳移动过程中,加速度计模块捕捉测量电线上安装点处的加速度变化,mcu根据加速度计模块反馈测量导轨方向的加速度值驱动步进电机带动铁氧环体,补偿测量电线的倾斜角度,降低因铁氧环体与吸收钳之间用于连接的测量电线倾斜导致的测量误差。
附图说明
22.图1为现有技术的的emi骚扰功率检测设备的结构示意图;
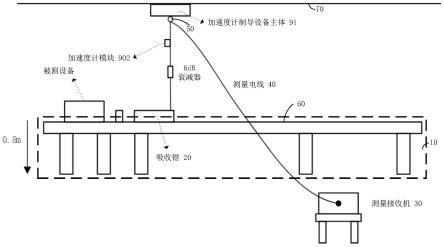
23.图2为本发明一种基于加速度计制导的emi骚扰功率检测设备的结构示意图;
24.图3为本发明具体实施例中加速度计制导设备90的结构示意图;
25.图4为本发明具体实施例中pid算法的实现示意图;
26.图5为本发明一种基于加速度计制导的emi骚扰功率检测方法的步骤流程图。
具体实施方式
27.以下通过特定的具体实例并结合附图说明本发明的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本发明的其它优点与功效。本发明亦可通过其它不同的具体实例加以施行或应用,本说明书中的各项细节亦可基于不同观点与应用,在不背离本发明的精神下进行各种修饰与变更。
28.图2为本发明一种基于加速度计制导的emi骚扰功率检测设备的结构示意图。如图2所示,本发明一种基于加速度计制导的emi骚扰功率检测设备,包括测试台10,其上铺设有用于支撑吸收钳20移动的吸收钳导轨60,吸收钳20置放于该吸收钳导轨60上,以检测被测设备的骚扰信号功率的频率及其波峰,吸收钳20通过测量电线40连接测量接收机30,以通过测量接收机30测量和记录骚扰信号功率的频率及其波峰,
29.加速度计制导设备90的加速度计模块902沿测量电线轴向附着于吸收钳20与铁氧环体组件50之间的测量电线段上,以测量该段测量电线上该安装点处的加速度值,即通过测量加速度计模块902自身的加速度值并发送至加速度计制导设备主体91,以使加速度计制导设备主体91、测量电线40、吸收钳20同步移动,
30.一测量电线导轨70平行且面向所述吸收钳导轨60设置于所述吸收钳导轨60上方,测量电线导轨70可根据需要固定于其他结构上,本发明不以此为限制。一加速度计制导设备主体91正对所述吸收钳20安装在测量电线导轨70上,所述测量电线40通过铁氧环体组件50的铁氧环体吊起并固定悬挂于加速度计制导设备主体91下方,且吸收钳20与铁氧环体组件50之间的测量电线段与吸收钳导轨60保持垂直,所述加速度计制导设备主体91之微处理器模块901接收加速度计模块902发送的加速度值信号并根据加速度值的变化,驱动自身的步进电机带动附有测量电线的铁氧环体组件50与吸收钳20同步移动,从而使得吸收钳20与铁氧环体组件50之间的测量电线段与吸收钳导轨60保持垂直,降低因测量电线倾斜导致的测量误差。
31.图3为本发明具体实施例中加速度计制导设备90的结构示意图。如图3所示,该加速度计制导设备90由微处理器模块901、加速度计模块902、步进电机驱动器903和步进电机904组成,微处理器模块901、步进电机驱动器903和步进电机904组成加速度计制导设备主体91。其中,微处理器模块901由微处理器和外围器件组成,用于接收加速度计模块902发送的加速度值,通过pid闭环控制算法计算出步进电机单位时间内旋转的角度与方向并输出控制信号控制步进电机的进退与快慢,使其与吸收钳20同步,保持测量电线40之吸收钳20与铁氧环体组件50之间的测量电线段的垂直状态;加速度计模块902由加速度传感器芯片mpu6050及其外围电路组成,用于获取安装位置的在测量导轨方向的加速度值并通过i2c接口反馈给微处理器模块(mcu)901;步进电机驱动器903,用于将微处理器模块901输出的控
制信号予以放大以驱动步进电机904运动;步进电机904,用于在微处理器模块901输出的控制信号的控制下带动测量电线40与吸收钳20同步移动并保持吸收钳20与铁氧环体组件50之间的测量电线段与吸收钳导轨60垂直。
32.具体地,电源电压3.3v连接至微处理器(mcu)和加速度传感器芯片mpu6050的电源输入正端,微处理器(mcu)和加速度传感器芯片mpu6050的电源输入负端接地gnd,加速度传感器芯片mpu6050通过i2c总线与微处理器(mcu)相连;微处理器(mcu)的第一通用输入输出口gpio1、第二通用输入输出口gpio2和第三通用输入输出口gpio3分别连接至步进电机驱动器903的许可端ena、方向控制端dir和驱动输入端pul,电源vcc连接至步进电机驱动器903的电源输入正端,步进电机驱动器903的电源输入负端接地gnd,步进电机驱动器903的输出端连接步进电机904;步进电机通过机械结构安装在测量电线导轨70上,吸收钳20安装在吸收钳导轨60上,铁氧环体组件50固定在加速度计制导设备主体91的外壳上,测量导线40穿过铁氧环体组件50的铁氧环体将吸收钳20和测量接收机30连接在一起,并且吸收钳20与铁氧环体组件50之间的测量电线段与吸收钳导轨60垂直。
33.为减小待测设备与测试接收机30之间的不匹配的影响,在测量电线40设置有6db的衰减器。
34.工作时,加速度计制导设备90通过微处理器模块(mcu)901控制加速度计模块902与步进电机904,加速度计模块902监测吸收钳20与铁氧环体组件50之间的测量电线段的加速度的变化,当测量电线被吸收钳带动发生角度倾斜时,加速度计模块902将监测到的加速度值例如角度通过i2c接口反馈给微处理器模块(mcu)901,微处理器模块(mcu)901根据输入的加速度值利用pid算法计算出步进电机单位时间内旋转的角度与方向,从而控制步进电机的进/退以及快/慢,使吸收钳20与铁氧环体组件50之间的测量电线段与测量导轨60的角度保持垂直。
35.pid算法常用于动态控制以使运动体在运动或静止中保持平稳。pid算法需要调试3个参数,即kp、ki、kd,分别对应比例、积分、微分,pid算法公式(1),其算法原理如图4所示,左侧输入为参考信号,其与加速度计模块902输出的加速度值在加法器进行差值运算获得误差信号,对该误差信号分别进行比例、积分和微分处理,再经过加法器合成得到控制信号并输出至步进电机的控制端以使步进电机执行瞬时速度补偿,本发明采用该算法,以使测量电线在运动或静止中也能灵活有效地保持垂直,降低因测量电线倾斜产生骚扰功率测量的误差。gpio1-gpio3输出控制信号控制步进电机动作(其中gpio1连接步进电机驱动器903的ena控制步进电机是否锁死,gpio2连接步进电机驱动器903的dir控制步进电机正反转,gpio3连接步进电机驱动器903的pul控制步进电机转速),mcu根据输入的加速度值,计算出步进电机单位时间内旋转的角度与方向。
36.图5为本发明一种基于加速度计制导的emi骚扰功率检测方法的步骤流程图。如图5所示,本发明一种基于加速度计制导的emi骚扰功率检测方法,包括如下步骤:
37.步骤s1,利用设置于吸收钳与铁氧环体组件之间的测量电线段上的加速度计模块实时测量该处的加速度值。
38.在本发明具体实施例中,加速度计模块沿测量电线轴向附着于吸收钳与铁氧环体组件之间的测量电线段上,通过测量加速度计模块自身加速度方向与大小的变化,加速度计制导设备的微处理器模块控制步进电机进退,保持模块的加速度值的方向保持水平,大
小趋于零,避免测量电线的倾斜。
39.步骤s2,根据加速度计模块实时测量的数据,通过pid闭环控制算法计算出步进电机单位时间内旋转的角度与方向以输出控制信号控制步进电机的进退与快慢,使其与吸收钳同步,保持吸收钳与铁氧环体组件之间的测量电线段的垂直状态。
40.在本发明具体实施例中,加速度计制导设备通过微处理器模块(mcu)控制加速度计模块与步进电机。加速度计模块监测角度是否发生倾斜。当测量电线被吸收钳带动发生角度倾斜时,加速度计模块将监测到的加速度值例如角度通过i2c接口反馈给微处理器模块(mcu),微处理器模块(mcu)根据输入的加速度值计算出步进电机单位时间内旋转的角度与方向,从而控制步进电机的进/退以及快/慢,使吸收钳与铁氧环体组件之间的测量电线段与测量导轨的角度保持垂直。
41.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何本领域技术人员均可在不违背本发明的精神及范畴下,对上述实施例进行修饰与改变。因此,本发明的权利保护范围,应如权利要求书所列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1