涉水深度的测定方法、装置、系统、电子设备及存储介质与流程
1.本发明实施例涉及机动车技术领域,尤其涉及一种涉水深度的测定方法、装置、系统、电子设备及存储介质。
背景技术:
2.暴雨会导致低洼路段积水,车辆在通过积水的低洼路段时易被水侵而危及安全。现有对车辆涉水深度的计算依靠人工目测,所得出的涉水深度值为估算值,不准确。
技术实现要素:
3.本发明实施例提供一种涉水深度的测定方法,以解决现有的涉水深度值不能被准确测定的问题。
4.为了解决上述技术问题,本发明是这样实现的:
5.第一方面,本发明实施例提供了一种涉水深度的测定方法,包括:
6.采用姿态角监控设备获取车辆的姿态角;
7.若所述姿态角的角度值为0,获取水面高度监控设备与水面之间的间距值,采用预先存储的水面高度监控设备与地面之间的间距值减去所述水面高度监控设备与水面之间的间距值,得到涉水深度值;
8.若所述姿态角的角度值不为0,获取至少两个所述水面高度监控设备与水面之间的间距值,将所述至少两个水面高度监控设备与水面之间的间距值相加得到第一值,采用所述第一值除以第一系数得到所述涉水深度值,所述第一系数的数值等于所述水面高度监控设备的数量。
9.可选地,还包括:
10.在所述涉水深度值超过预设的涉水深度阈值的情况下,发送第一告警至与驾驶员关联的交互端,所述第一告警用于指示涉水对车辆安全造成危害。
11.可选地,发送第一告警至与驾驶员关联的交互端包括:
12.采用控制器局域网络can发送所述第一告警至所述交互端。
13.可选地,还包括:
14.在所述涉水深度值超过预设的涉水深度阈值的情况下,采用摄像头监控设备实时获取车辆监控信息,将所述车辆监控信息发送至与驾驶员关联的交互端,所述车辆监控信息至少包括以下一项:车辆前侧的路况信息、车辆后侧的路况信息、车辆左侧的路况信息以及车辆右侧的路况信息。
15.可选地,将所述车辆监控信息发送至与驾驶员关联的交互端包括:
16.采用控制器局域网络can发送所述车辆监控信息至所述交互端。
17.第二方面,本发明实施例提供了一种涉水深度的测定装置,包括:
18.获取模块,用于采用监控设备获取车辆的姿态角;
19.第一执行模块,用于若所述姿态角的角度值为0,采用监控设备获取所述监控设备
与水面之间的间距值,采用预设的监控设备与地面之间的间距值减去所述监控设备与水面之间的间距值,得到涉水深度值;
20.第二执行模块,用于若所述姿态角的角度值不为0,采用监控设备在所述姿态角方向上获取多个所述监控设备与水面之间的间距值,将所有的所述监控设备与水面之间的间距值相加得到第一值,采用所述第一值除以第一系数得到所述涉水深度值,所述第一系数的数值等于所述监控设备与水面之间的间距值的数量。
21.第三方面,本发明实施例提供了一种涉水深度的测定系统,包括:
22.至少两个水面高度监控设备,设置于车辆上;
23.姿态角监控设备,设置于车辆上;
24.涉水深度的测定装置,与所述至少两个水面高度监控设备、姿态角监控设备连接,用于采用姿态角监控设备获取车辆的姿态角;若所述姿态角的角度值为0,获取水面高度监控设备与水面之间的间距值,采用预先存储的水面高度监控设备与地面之间的间距值减去所述水面高度监控设备与水面之间的间距值,得到涉水深度值;若所述姿态角的角度值不为0,获取至少两个所述水面高度监控设备与水面之间的间距值,将所述至少两个水面高度监控设备与水面之间的间距值相加得到第一值,采用所述第一值除以第一系数得到所述涉水深度值,所述第一系数的数值等于所述水面高度监控设备的数量。
25.可选地,包括两个水面高度监控设备,两个所述水面高度监控设备分别设置在车辆的两个后视镜上。
26.第四方面,本发明实施例提供了一种电子设备,包括处理器,存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如第一方面中任一项所述的涉水深度的测定方法中的步骤。
27.第五方面,本发明实施例提供了一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如第一方面中任一项所述的涉水深度的测定方法中的步骤。
28.在本发明实施例中,通过姿态角检测设备获取车辆的姿态角,根据姿态角的角度值、水面高度监控设备与水面之间的间距值以及预先存储的水面高度检测设备与地面之间的间距值得出涉水深度,实现了涉水深度值的准确测定。
附图说明
29.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
30.图1为本发明实施例涉水深度的测定方法的流程示意图之一;
31.图2为本发明实施例涉水深度的测定装置的内部结构示意图;
32.图3为本发明实施例涉水深度的测定系统的工作原理示意图;
33.图4为本发明实施例电子设备的内部结构示意图。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.本发明实施例提供了一种涉水深度的测定方法,参见图1所示,图1为本发明实施例涉水深度的测定方法的流程示意图之一,包括:
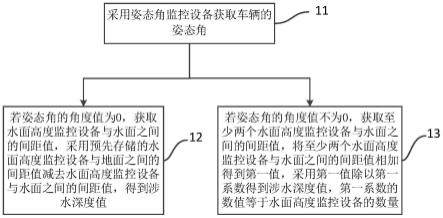
36.步骤11:采用姿态角监控设备获取车辆的姿态角;
37.步骤12:若姿态角的角度值为0,获取水面高度监控设备与水面之间的间距值,采用预先存储的水面高度监控设备与地面之间的间距值减去水面高度监控设备与水面之间的间距值,得到涉水深度值;
38.步骤13:若姿态角的角度值不为0,获取至少两个水面高度监控设备与水面之间的间距值,将至少两个水面高度监控设备与水面之间的间距值相加得到第一值,采用第一值除以第一系数得到涉水深度值,第一系数的数值等于水面高度监控设备的数量。
39.在本发明实施例中,通过姿态角检测设备获取车辆的姿态角,根据姿态角的角度值、水面高度监控设备与水面之间的间距值以及预先存储的水面高度检测设备与地面之间的间距值得出涉水深度,实现了涉水深度值的准确测定。
40.本发明的一些实施例中,可选地,在涉水深度值超过预设的涉水深度阈值的情况下,发送第一告警至与驾驶员关联的交互端,第一告警用于指示涉水对车辆安全造成危害。
41.本发明的一些实施例中,可选地,发送第一告警至与驾驶员关联的交互端包括:
42.采用控制器局域网络can发送第一告警至交互端。
43.can是控制器域网(controller area network,can)的简称,是由研发和生产汽车电子产品著称的德国bosch公司开发了的,并最终成为国际标准(iso11898)。是国际上应用最广泛的现场总线之一。在北美和西欧,can总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以can为底层协议专为大型货车和重工机械车辆设计的j1939协议。近年来,其所具有的高可靠性和良好的错误检测能力受到重视,被广泛应用于汽车计算机控制系统和环境温度恶劣、电磁辐射强和振动大的工业环境。
44.随着工业测控技术和生产自动化技术的不断进步,传统的rs-232、rs-485和ccittv.24通信技术已不能适应现代化的工业控制需要,而现场总线(fieldbus)以其低廉的价格、可靠的性能而逐步成为新型的工业测控领域的通信技术。现场总线是应用在生产现场,在微机化测量控制设备之间实现双向串行多节点数字通信的系统,是一种开放式、数字化、多点通信的底层控制网络。汇集了计算机技术、网络通信技术和自动控制技术(3c)的现场总线技术,从20世纪80年代开始发展起来,并逐步在制造业、流程工业、交通、楼宇等方面的自动化系统中得到了广泛的重视和应用。现场总线主要有以下几种类型:基金会现场总线(ff)、lonworks、profibus、can、hart,而其中can(controller area network)即控制器域网因为具有高性能、高可靠性以及独特的设计而越来越受到关注,现已形成国际标准,被公认为几种最有前途的现场总线之一。
45.本发明的一些实施例中,可选地,还包括:
46.在涉水深度值超过预设的涉水深度阈值的情况下,采用摄像头监控设备实时获取车辆监控信息,将车辆监控信息发送至与驾驶员关联的交互端,车辆监控信息至少包括以下一项:车辆前侧的路况信息、车辆后侧的路况信息、车辆左侧的路况信息以及车辆右侧的
路况信息。
47.本发明的一些实施例中,可选地,将车辆监控信息发送至与驾驶员关联的交互端包括:
48.采用控制器局域网络can发送车辆监控信息至交互端。
49.本发明实施例提供了一种涉水深度的测定装置,参见图2所示,图2为本发明实施例涉水深度的测定装置20的内部结构示意图,包括:
50.获取模块21,用于采用监控设备获取车辆的姿态角;
51.第一执行模块22,用于若姿态角的角度值为0,采用监控设备获取监控设备与水面之间的间距值,采用预设的监控设备与地面之间的间距值减去监控设备与水面之间的间距值,得到涉水深度值;
52.第二执行模块23,用于若姿态角的角度值不为0,采用监控设备在姿态角方向上获取多个监控设备与水面之间的间距值,将所有的监控设备与水面之间的间距值相加得到第一值,采用第一值除以第一系数得到涉水深度值,第一系数的数值等于监控设备与水面之间的间距值的数量。
53.本发明的一些实施例中,可选地,
54.涉水深度的测定装置20还包括:
55.告警模块24,用于在涉水深度值超过预设的涉水深度阈值的情况下,发送第一告警至与驾驶员关联的交互端,第一告警用于指示涉水对车辆安全造成危害。
56.本发明的一些实施例中,可选地,
57.告警模块24,还用于采用控制器局域网络can发送第一告警至交互端。
58.本发明的一些实施例中,可选地,
59.涉水深度的测定装置20还包括:
60.感测模块25,用于在涉水深度值超过预设的涉水深度阈值的情况下,采用摄像头监控设备实时获取车辆监控信息,将车辆监控信息发送至与驾驶员关联的交互端,车辆监控信息至少包括以下一项:车辆前侧的路况信息、车辆后侧的路况信息、车辆左侧的路况信息以及车辆右侧的路况信息。
61.本发明的一些实施例中,可选地,
62.感测模块25,还用于采用控制器局域网络can发送车辆监控信息至交互端。
63.本技术实施例提供的涉水深度的测定装置能够实现图1的方法实施例实现的各个过程,并达到相同的技术效果,为避免重复,这里不再赘述。
64.本发明实施例提供了一种涉水深度的测定系统,包括:
65.至少两个水面高度监控设备,设置于车辆上;
66.姿态角监控设备,设置于车辆上;
67.涉水深度的测定装置,与至少两个水面高度监控设备、姿态角监控设备连接,用于采用姿态角监控设备获取车辆的姿态角;若姿态角的角度值为0,获取水面高度监控设备与水面之间的间距值,采用预先存储的水面高度监控设备与地面之间的间距值减去水面高度监控设备与水面之间的间距值,得到涉水深度值;若姿态角的角度值不为0,获取至少两个水面高度监控设备与水面之间的间距值,将至少两个水面高度监控设备与水面之间的间距值相加得到第一值,采用第一值除以第一系数得到涉水深度值,第一系数的数值等于水面
高度监控设备的数量。
68.本发明的一些实施例中,可选地,参见图3所示,图3为本发明实施例涉水深度的测定系统的工作原理示意图,涉水深度的测定系统包括两个水面高度监控设备n1和n2,水面高度监控设备n1和n2分别设置在车辆的两个后视镜上。
69.若姿态角的角度值为0,预先存储的水面高度监控设备与地面之间的间距值为h,水面高度监控设备与水面之间的间距值为h,涉水深度值h1=h-h;
70.若姿态角的角度值不为0,水面高度监控设备n1与水面之间的间距值为h1,水面高度监控设备n2与水面之间的间距值为h2,h1=(h1+h2)/2。
71.本发明的一些实施例中,可选地,水面高度监控设备n1和n2均为超声波传感器,两个超声波传感器的内部结构均和外观均相同,每个传感器单元均能够作为独立单元进行信息传输;也可以其中一个作为主传感器,主传感器协调另外一个传感器作为从属传感器,控制从属传感器的工作时序。
72.本发明的一些实施例中,可选地,姿态角监控设备为陀螺仪。
73.本发明实施例提供了一种电子设备40,参见图4所示,图4为本发明实施例电子设备40的内部结构示意图,包括处理器41,存储器42及存储在存储器42上并可在处理器41上运行的程序或指令,程序或指令被处理器执行时实现本发明的任一项涉水深度的测定方法中的步骤。
74.本发明实施例提供了一种可读存储介质,可读存储介质上存储程序或指令,程序或指令被处理器执行时实现如上述任一项的涉水深度的测定方法的实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。
75.其中,所述的可读存储介质,如只读存储器(read-only memory,简称rom)、随机存取存储器(random access memory,简称ram)、磁碟或者光盘等。
76.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1