火箭连接器连接的管路接口的反力测量系统及测量方法与流程
1.本技术属于航天航空领域,具体涉及一种火箭连接器连接的管路接口的反力测量系统及测量方法。
背景技术:
2.火箭连接器是加注、供气、供电、通风等地面管线与火箭箭体上接口之间的连接设备,其用于实现火箭的推进剂加注、泄出、排放、排气,供气和供电等功能。实现上述功能后,火箭连接器要能够从箭体上可靠地脱落,而脱落会对箭上接口附近的结构产生反力。由于火箭箭体为薄壁结构,因此箭上接口(尤其是大口径的推进剂管路接口)的反力值应限制在一定范围内,以免造成箭上接口附近区域的屈曲变形。
3.传统的管路接口反力一般采用经验系数法或有限元法进行分析计算,经验系数法在精细设计中往往过于保守,有限元法的计算准确度往往受建模和网格划分水平的影响较大。传统的管路接口测量一般通过贴应变片测量,测量同样较大地受贴片位置、熟练程度、温湿度、应力应变换算误差等影响。
技术实现要素:
4.为至少在一定程度上克服相关技术中存在的问题,本技术提供了一种火箭连接器连接的管路接口的反力测量系统及测量方法。
5.根据本技术实施例的第一方面,本技术提供了一种火箭连接器连接的管路接口的反力测量系统,其包括框架以及设置在所述框架上的测量管路组件和测力组件;所述测量管路组件用于通过火箭连接器连接被测管路,所述测力组件用于测量被测管路通有介质达到平衡状态时或被测管路通过火箭连接器与所述测量管路组件分离时在所述测量管路组件与火箭连接器连接的连接面上的反力。
6.上述火箭连接器连接的管路接口的反力测量系统中,所述框架包括顶梁、立柱、底支架和后支架;所述顶梁的两端分别连接一所述立柱,所述顶梁与立柱构成一底端开口的倒框结构;沿与所述倒框结构所在平面垂直的方向,在所述倒框结构的一侧设置有所述底支架;沿与所述倒框结构所在平面垂直的方向,在所述倒框结构设置有所述底支架的一侧设置有所述后支架;所述后支架设置在所述底支架的上方,所述后支架与底支架之间用于设置所述测量管路组件。
7.进一步地,所述底支架包括支撑梁和连接梁,所述支撑梁的两端分别连接一所述连接梁,所述连接梁与支撑梁连接一端的相对端与所述立柱连接;所述支撑梁与顶梁平行设置。
8.更进一步地,所述后支架包括横梁和竖梁,所述横梁的一端与所述顶梁连接,其另一端与所述竖梁的一端连接,所述竖梁的另一端用于连接所述测量管路组件;所述横梁与连接梁平行设置。
9.更进一步地,所述测量管路组件包括测量管段、测量管接头和管路吊架;所述测量
管段的一端通过法兰与所述测量管接头的一端连接,所述测量管接头的另一端用于连接被测管路;所述测量管段与测量管接头连接一端的相对端用于连接后端管路;所述管路吊架设置在所述测量管接头上,其用于对所述测量管接头进行悬吊。
10.更进一步地,所述测量管路组件还包括管路连接件,所述管路连接件设置在所述测量管段一端连接的所述法兰与所述测量管接头之间,其用于连接所述测量管段与测量管接头。
11.更进一步地,所述测力组件包括x正向拉压力传感器、x负向拉压力传感器、y正向拉压力传感器、第一z正向拉压力传感器和第二z正向拉压力传感器;
12.所述x正向拉压力传感器的一端通过连杆与一所述立柱连接,其另一端通过钢丝绳与所述管路吊架连接;所述x负向拉压力传感器的一端通过连杆与另一所述立柱连接,其另一端通过钢丝绳与所述管路吊架连接;
13.所述y正向拉压力传感器的一端通过连杆与所述顶梁连接,其另一端通过钢丝绳与所述管路吊架连接;
14.以所述测量管段的中轴线为对称轴,所述第一z正向拉压力传感器和第二z正向拉压力传感器对称设置在所述测量管段的的上下两侧;所述第一z正向拉压力传感器的一端通过连杆与所述竖梁连接,其另一端通过钢丝绳与所述测量管段和测量管接头连接一端设置的法兰连接;所述第二z正向拉压力传感器的一端通过连杆与所述底支架连接,其另一端通过钢丝绳与所述测量管段和测量管接头连接一端设置的法兰连接。
15.更进一步地,所述测力组件还包括吊环螺钉,所述吊环螺钉的一端与所述x正向拉压力传感器、x负向拉压力传感器或y正向拉压力传感器连接,其另一端与所述管路吊架连接。
16.更进一步地,沿所述立柱的竖直方向,在所述立柱上开设有腰圆孔,与所述x正向拉压力传感器或x负向拉压力传感器连接的连杆的一端固定连接在所述腰圆孔中;
17.所述顶梁上开设有第一圆形通孔,与所述y正向拉压力传感器连接的连杆的一端固定连接在所述第一圆形通孔中;
18.所述竖梁上开设有第二圆形通孔,与所述第一z正向拉压力传感器连接的连杆的一端固定连接所述第二圆形通孔中;
19.所述支撑梁上开设有腰圆槽,与所述第二z正向拉压力传感器连接的连杆的一端固定连接在所述腰圆槽中。
20.根据本技术实施例的第二方面,本技术还提供了一种管路接口反力测量方法,其包括以下步骤:
21.对各拉压力传感器进行初始标定,x正向拉压力传感器的初始值记为x
0+
,x负向拉压力传感器的初始值记为x
0-,y正向拉压力传感器的初始值记为y0,第一z正向拉压力传感器的初始值记为z
10
,第二z正向拉压力传感器的初始值记为z
20
;
22.将被测管路通过火箭连接器与测量管接头连接,开启各拉压力传感器进行力值数据采集;
23.待被测管路静置平衡或火箭连接器与测量管接头分离时,对测量管路组件与火箭连接器连接的连接面上的力值进行采集,采集的力值分别为:x
1+
、x
1-、y1、z
11
、z
21
;
24.根据各拉压力传感器采集的力值换算得到管路三个方向的反力分别为:
25.x向管路接口反力:(x
1+-‑
x
1-)-(x
0+-x
0-);
26.y向管路接口反力:y
1-y0;
27.z向管路接口反力:(z
11
+z
21
)-(z
10
+z
20
);
28.管路接口弯矩为:[(z
11-z
21
)-(z
10-z
20
)]r,其中,r表示第一z正向拉压力传感器连接的钢丝绳的中轴线与测量管段的中轴线之间的距离。
[0029]
根据本技术的上述具体实施方式可知,至少具有以下有益效果:本技术提供的火箭连接器连接的管路接口的反力测量系统通过框架对测量管路组件进行x方向、y方向和z方向的支撑或拉伸,测量管路组件用于通过火箭连接器连接被测管路,通过测力组件对被测管路静置平衡时或通过火箭连接器与测量管路组件分离时测量管路组件与火箭连接器连接的连接面上的力值进行测量,通过简单的加减运算即可快速换算得到所需测量的反力值;本技术提供的火箭连接器连接的管路接口的反力测量系统测量原理简单、拆装方便、受环境和人员操作水平影响小。
[0030]
应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本技术所欲主张的范围。
附图说明
[0031]
下面的所附附图是本技术的说明书的一部分,其示出了本技术的实施例,所附附图与说明书的描述一起用来说明本技术的原理。
[0032]
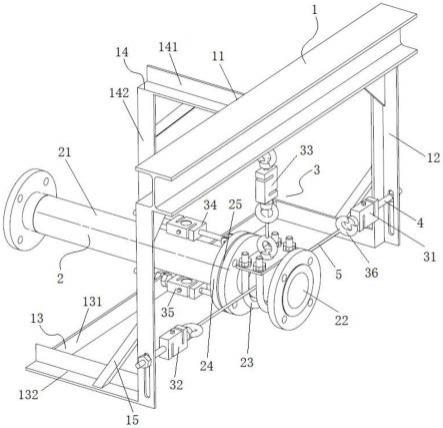
图1为本技术具体实施方式提供的一种火箭连接器连接的管路接口的反力测量系统的整体结构示意图。
[0033]
图2为本技术具体实施方式提供的一种火箭连接器连接的管路接口的反力测量系统的主视图。
[0034]
图3为图2的a-a视图。
[0035]
图4为图2的b-b视图。
[0036]
附图标记说明:
[0037]
1、框架;
[0038]
11、顶梁;12、立柱;
[0039]
13、底支架;131、支撑梁;132、连接梁;
[0040]
14、后支架;141、横梁;142、竖梁;
[0041]
15、加强板;
[0042]
2、测量管路组件;
[0043]
21、测量管段;22、测量管接头;23、管路吊架;24、法兰;25、管路连接件;
[0044]
3、测力组件;
[0045]
31、x正向拉压力传感器;32、x负向拉压力传感器;33、y正向拉压力传感器;34、第一z正向拉压力传感器;35、第二z正向拉压力传感器;36、吊环螺钉;
[0046]
4、连杆;5、钢丝绳。
具体实施方式
[0047]
为使本技术实施例的目的、技术方案和优点更加清楚明白,下面将以附图及详细
叙述清楚说明本技术所揭示内容的精神,任何所属技术领域技术人员在了解本技术内容的实施例后,当可由本技术内容所教示的技术,加以改变及修饰,其并不脱离本技术内容的精神与范围。
[0048]
本技术的示意性实施例及其说明用于解释本技术,但并不作为对本技术的限定。另外,在附图及实施方式中所使用相同或类似标号的元件/构件是用来代表相同或类似部分。
[0049]
关于本文中所使用的“第一”、“第二”、
…
等,并非特别指称次序或顺位的意思,也非用以限定本技术,其仅为了区别以相同技术用语描述的元件或操作。
[0050]
关于本文中所使用的“包含”、“包括”、“具有”、“含有”等等,均为开放性的用语,即意指包含但不限于。
[0051]
关于本文中所使用的“及/或”,包括所述事物的任一或全部组合。
[0052]
关于本文中的“多个”包括“两个”及“两个以上”;关于本文中的“多组”包括“两组”及“两组以上”。
[0053]
某些用以描述本技术的用词将于下或在此说明书的别处讨论,以提供本领域技术人员在有关本技术的描述上额外的引导。
[0054]
如图1~图4所示,本技术实施例提供的火箭连接器连接的管路接口的反力测量系统包括框架1以及设置在框架1上的测量管路组件2和测力组件3。其中,测量管路组件2用于通过火箭连接器连接被测管路,测力组件3用于测量被测管路通有介质达到平衡状态时或被测管路通过火箭连接器与测量管路组件2分离时在测量管路组件2与火箭连接器连接的连接面上的反力。
[0055]
在本实施例中,框架1包括顶梁11、立柱12、底支架13和后支架14。其中,顶梁11的两端分别连接一立柱12,顶梁11与立柱12构成一底端开口的倒框结构。沿与倒框结构所在平面垂直的方向,在倒框结构的一侧设置有底支架13。
[0056]
底支架13包括支撑梁131和连接梁132,支撑梁131的两端分别连接一连接梁132,连接梁132与支撑梁131连接一端的相对端与立柱12连接。支撑梁131与顶梁11平行设置。
[0057]
沿与倒框结构所在平面垂直的方向,在倒框结构设置有底支架13的一侧设置有后支架14。后支架14包括横梁141和竖梁142,横梁141的一端与顶梁11连接,其另一端与竖梁142的一端连接,竖梁142的另一端用于连接测量管路组件2。横梁141与连接梁132平行设置。
[0058]
后支架14设置在底支架13的上方,后支架14与底支架13之间的空间用于设置测量管路组件2。
[0059]
在一个具体的实施例中,顶梁11与立柱12的连接处、连接梁132与立柱12的连接处以及横梁141与竖梁142的连接处均设置有加强板15。
[0060]
在上述实施例中,如图1、图3和图4所示,测量管路组件2包括测量管段21、测量管接头22和管路吊架23。其中,测量管段21的一端通过法兰24与测量管接头22的一端连接,测量管接头22的另一端用于连接被测管路。测量管段21与测量管接头22连接一端的相对端用于连接后端管路。管路吊架23设置在测量管接头22上,其用于对测量管接头22进行悬吊。
[0061]
在本实施例中,如图1、图3和图4所示,测量管路组件2还包括管路连接件25,管路连接件25设置在测量管段21一端连接的法兰24与测量管接头22之间,其用于连接测量管段
21与测量管接头22。具体地,管路连接件25可以为螺栓、螺母和垫片。
[0062]
在上述实施例中,如图1~图4所示,测力组件3包括x正向拉压力传感器31、x负向拉压力传感器32、y正向拉压力传感器33、第一z正向拉压力传感器34和第二z正向拉压力传感器35。其中,x正向拉压力传感器31的一端通过连杆4与一立柱12连接,其另一端通过钢丝绳5与管路吊架23连接。x负向拉压力传感器32的一端通过连杆4与另一立柱12连接,其另一端通过钢丝绳5与管路吊架23连接。y正向拉压力传感器33的一端通过连杆4与顶梁11连接,其另一端通过钢丝绳5与管路吊架23连接。以测量管段21的中轴线为对称轴,第一z正向拉压力传感器34和第二z正向拉压力传感器35对称设置在测量管段21的的上下两侧。第一z正向拉压力传感器34的一端通过连杆4与后支架14中的竖梁142连接,其另一端通过钢丝绳5与测量管段21和测量管接头22连接一端设置的法兰24连接。第二z正向拉压力传感器35的一端通过连杆4与底支架13连接,其另一端通过钢丝绳5与测量管段21和测量管接头22连接一端设置的法兰24连接。
[0063]
具体地,以测量管段21的中轴线为对称轴,法兰24上对称设置有两铰点。钢丝绳5与第一z正向拉压力传感器34或第二z正向拉压力传感器35连接一端的相对端与铰点连接。
[0064]
在一个具体的实施例中,如图1~图4所示,测力组件3还包括吊环螺钉36,吊环螺钉36的一端与x正向拉压力传感器31、x负向拉压力传感器32或y正向拉压力传感器33连接,其另一端与管路吊架23连接。
[0065]
在另一个具体的实施例中,沿立柱12的竖直方向,在立柱12上开设有腰圆孔,与x正向拉压力传感器31或x负向拉压力传感器32连接的连杆4的一端固定连接在腰圆孔中,以便于与x正向拉压力传感器31或x负向拉压力传感器32连接的连杆4能够沿立柱12的竖直方向在腰圆孔中进行少量移动。
[0066]
顶梁11上开设有第一圆形通孔,与y正向拉压力传感器33连接的连杆4的一端固定连接在第一圆形通孔中。
[0067]
竖梁142上开设有第二圆形通孔,与第一z正向拉压力传感器34连接的连杆4的一端固定连接第二圆形通孔中。
[0068]
支撑梁131上开设有腰圆槽,与第二z正向拉压力传感器33连接的连杆4的一端固定连接在腰圆槽中。
[0069]
在一个具体的实施例中,顶梁11可以采用工字钢。框架1也可以采用型钢、钢板、钢管或铝合金等有色金属制成。各连杆4采用圆钢制成。
[0070]
本技术实施例提供的火箭连接器连接的管路接口的反力测量系统通过框架1对测量管路组件2进行x方向、y方向和z方向的支撑或拉伸,通过测力组件3对测量管路组件2连接的被测管路或火箭连接器分离后在测量管路组件2的x方向、y方向和z方向的反力进行测量,测量原理简单、拆装方便、受环境和人员操作水平影响小,通过简单的加减运算即可快速换算得到所需测量的反力值。
[0071]
基于本技术实施例提供的火箭连接器连接的管路接口的反力测量系统,本技术实施例还提供了一种管路接口反力测量方法,其包括以下步骤:
[0072]
s1、对各拉压力传感器进行初始标定,x正向拉压力传感器31的初始值记为x
0+
,x负向拉压力传感器32的初始值记为x
0-,y正向拉压力传感器33的初始值记为y0,第一z正向拉压力传感器34的初始值记为z
10
,第二z正向拉压力传感器35的初始值记为z
20
。
[0073]
s2、将被测管路通过火箭连接器与测量管接头22连接,开启各拉压力传感器进行力值数据采集。
[0074]
s3、待被测管路静置平衡或火箭连接器与测量管接头22分离时,通过各拉压力传感器对测量管路组件2与火箭连接器连接的连接面上的力值进行采集,采集的力值分别记为:x
1+
、x
1-、y1、z
11
、z
21
。
[0075]
s4、根据各拉压力传感器采集的力值换算得到管路三个方向的反力分别为:
[0076]
x向管路接口反力(水平):(x
1+-‑
x
1-)-(x
0+-x
0-);
[0077]
y向管路接口反力(竖直):y
1-y0;
[0078]
z向管路接口反力(轴向):(z
11
+z
21
)-(z
10
+z
20
);
[0079]
管路接口弯矩为:[(z
11-z
21
)-(z
10-z
20
)]r,其中,r表示第一z正向拉压力传感器34连接的钢丝绳5的中轴线与测量管段21的中轴线之间的距离。
[0080]
以上所述仅为本技术示意性的具体实施方式,在不脱离本技术的构思和原则的前提下,任何本领域的技术人员所做出的等同变化与修改,均应属于本技术保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1