一种现浇桥梁浇筑时沉降位移监测方法与流程
1.本发明涉及沉降位移监测领域,特别是一种现浇桥梁浇筑时沉降位移监测方法。
背景技术:
2.在现浇桥梁施工中,通常在首次支架搭设和模板铺设完成后进行荷载预压监测,此目的是待荷载预压合格后,得到地基承载能力、模板的弹性变形值以及支架的变形和弹性变形值。以便在后续现浇梁支架搭设和模板铺设的过程中,对以上三种变形值进行改正,从而使完工后梁体达到设计参数的要求。但是,由于梁体位置(地基承载力变化)和材料的不同,经过变形值改正后并不能够完全杜绝梁体变形的产生,因此在桥梁浇筑过程中,也会采用过程监测。
3.事实上,不管在荷载预压监测还是桥梁浇筑过程监测,监测周期都比较短,且不分白天晚上。监测方法大多采用的是吊锤球测位移和水准测沉降,此方法简单实用,但费时费力,不能准确快速的得到变形值。
4.吊锤球测位移的方法的缺点是需要观测人员进入到现浇梁支架内,容易磕碰,不安全;受震动和野外风力的影响,锤球短时间内不能静止,测量误差较大且费事。水准测沉降的方法的缺点是至少需要2人同时作业,且不能及时得到沉降值,需要内业平差处理。
5.目前全站仪配合棱镜监测方法比较多,设备型号也很多,大多数采用自动化监测,数据报告也能自动化,这样资金投入比较大,设备精度高,监测周期比较长,少则半个月,多则整个运营期都在观测。
6.为能够在现浇桥梁施工过程中即省时省力又准确快速的得到监测沉降位移值和变形值,是目前需要解决的问题。
技术实现要素:
7.针对目前背景技术存在的技术问题,本技术的实施例提出了一种现浇桥梁浇筑时沉降位移监测方法来解决以上的问题。
8.本技术提出了一种现浇桥梁浇筑时沉降位移监测方法,包括以下步骤:
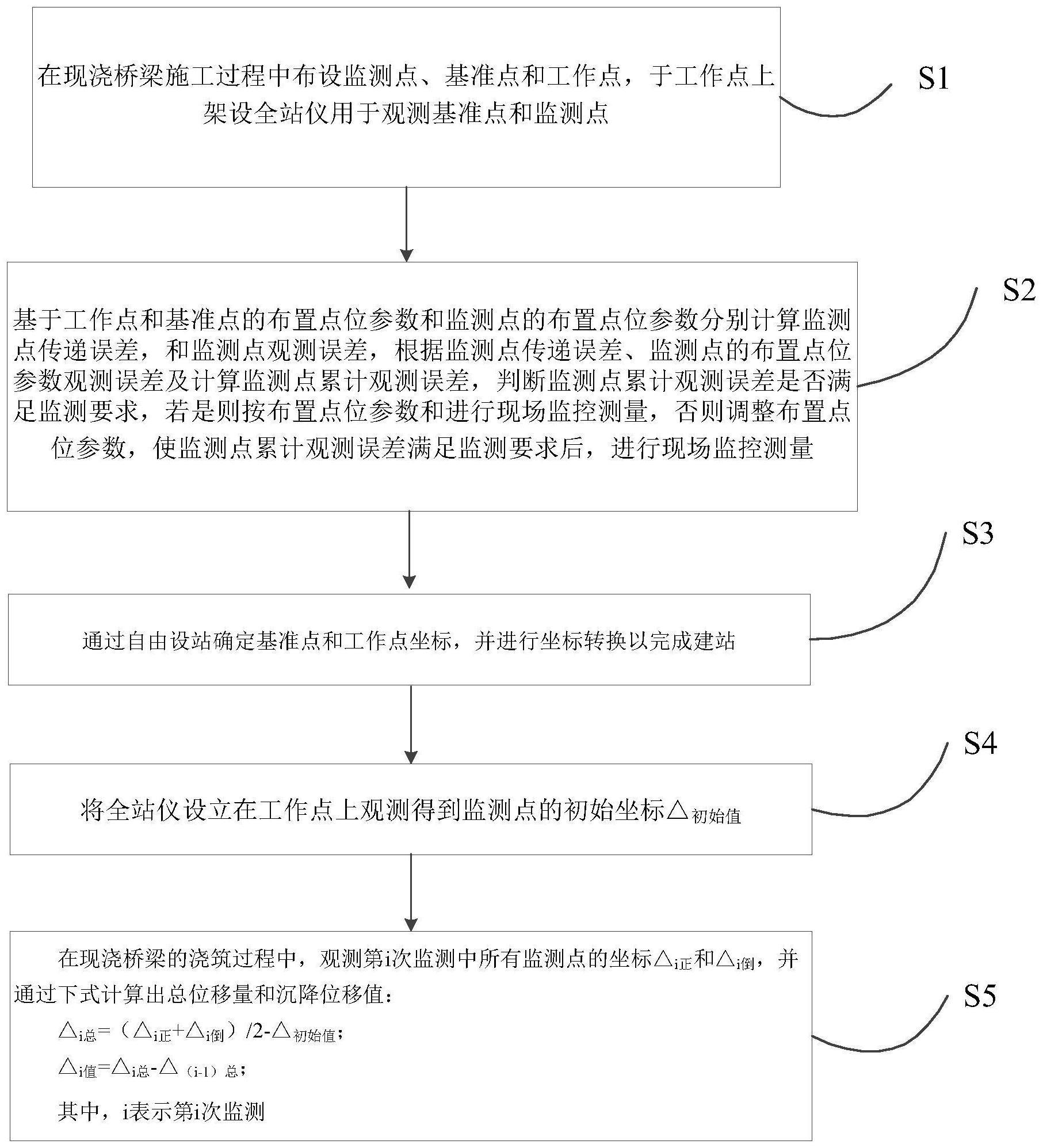
9.s1,在现浇桥梁施工过程中布设监测点、基准点和工作点,于工作点上架设全站仪用于观测基准点和监测点;
10.s2,基于基准点的布置点位参数和监测点的布置点位参数分别计算监测点传递误差和监测点观测误差,根据监测点传递误差、监测点观测误差计算监测点累计观测误差,判断监测点累计观测误差是否满足监测要求,若是则按布置点位参数进行现场监控测量,否则调整布置点位参数,使监测点累计观测误差满足监测要求后,进行现场监控测量;
11.s3,通过自由设站确定基准点和工作点坐标,并进行坐标转换以完成建站;
12.s4,将全站仪设立在工作点上观测得到监测点的初始坐标
△
初始值
;
13.s5,在现浇桥梁的浇筑过程中,观测第i次监测中所有监测点的坐标
△
i正
和
△
i倒
,并通过下式计算出总位移量和沉降位移值:
14.△
i总
=(
△
i正
+
△
i倒
)/2
‑△
初始值
;
15.△
i值
=
△
i总
‑△
(i-1)总
;
16.其中,i表示第i次监测。
17.作为优选,步骤s1中监测点设置在现浇桥梁的两侧边的箱室的隔墙下以及相邻两个箱室之间的共用隔墙下,并形成监测区域。
18.作为优选,以现浇桥梁的一跨为单位,在荷载变化最大处设一横断面,每跨首尾和中间至少设三个断面,每个断面上的监测点至少为4个。
19.作为优选,步骤s1中监测点和基准点以粘贴反射片的形式布设于待监测位置和监测区域周边墩柱上,基准点的布设区域包含监测区域,工作点布设在现浇桥梁的支架两侧10-30m范围内选择视线良好、避免震动和其他干扰的便于建站的位置上。
20.作为优选,全站仪在观测时采用的是免棱镜功能,在点位布设时反射片大致垂直于视线方向,反射片十字丝与望远镜十字丝成45
°
夹角。
21.作为优选,步骤s2中基准点的布置点位参数包括工作点和基准点的最大间距s1、第一角度误差θ1、第一测距误差d1、第一最大仰角θ2,监测点传递误差包括基准点误差和工作点设站误差,基准点误差包括基准点的垂直误差和基准点的位移误差,以正倒镜观测3组的方法,同精度进行自由设站误差计算,基准点的垂直误差基准点的位移误差在自由设站时,工作点设站误差包括工作点的垂直误差和工作点的位移误差,因观测的数据有n组数据,每组数据有斜距、天顶距和水平角,以正倒镜观测的方法,同精度n组数据进行误差计算,工作点的垂直误差为工作点的位移误差为n为设站时基准点的个数。
22.作为优选,步骤s2中监测点的布置点位参数包括工作点到监测点的监测距离s2、第二角度误差θ3、第二测距误差d2、第二最大仰角θ4,监测点观测误差包括监测点的垂直误差和监测点的位移误差,以正倒镜观测的方法,同精度进行误差计算,监测点的垂直误差监测点的位移误差监测点累计观测误差包括监测点累计垂直误差和监测点累计位移误差;根据误差传播定律,监测点累计垂直误差监测点累计位移误差
23.作为优选,步骤s3具体包括:
24.利用全站仪对边测量功能精确测定第一基准点和第二基准点的水平距离l和垂直高差z后,确定第一基准点的坐标为(0,0,0),第二基准点的坐标为(l,0,z),通过自由设站获得工作点和其他基准点的坐标;
25.以至少3个基准点的坐标自由设站,以正倒镜测量坐标取其均值的方式复核每个
基准点的坐标,当每个基准点和工作点误差满足限差要求时,完成初始建站;
26.进行坐标系转换,转换后的坐标系以桥梁轴线方向为x轴,y轴根据左手定则确定,z轴竖直向上,即完成建站。
27.作为优选,步骤s4中监测点的初始坐标采用正倒镜测量坐标取其均值的方式采集得到。
28.作为优选,步骤s5中以正倒镜放样模式进行点位测量,取其偏差值的均值后,观测得到所有监测点的坐标
△
i正
和
△
i倒
。
29.与现有技术相比,本发明具有以下有益效果:
30.(1)本发明以项目现有全站仪为主要测量设备,通过布设合理的监测点位、制定科学的观测方法和控制各项观测值的限差值,来满足施工监测的精度要求。
31.(2)本发明的现浇桥梁浇筑时沉降位移监测方法采用普通全站仪对现浇桥梁浇筑的过程中进行沉降位移监测,监测周期短,成本低。
32.(3)本发明的现浇桥梁浇筑时沉降位移监测方法能够在监测点位布设好后及时测量监测点观测误差,并进行调整使其满足监测要求,能够有效降低误差。
33.(4)本发明在监测过程中,只需操作者一人即可完成监测工作,无需进入支架内部,避免磕碰误伤,更加安全,并且无需二次测量,一次测量就能够得到监测值,速度更快,效率更高,成果数据处理方便且简单,无需平差。
附图说明
34.包括附图以提供对实施例的进一步理解并且附图被并入本说明书中并且构成本说明书的一部分。附图图示了实施例并且与描述一起用于解释本发明的原理。将容易认识到其它实施例和实施例的很多预期优点,因为通过引用以下详细描述,它们变得被更好地理解。附图的元件不一定是相互按照比例的。同样的附图标记指代对应的类似部件。
35.图1为本技术的实施例的现浇桥梁浇筑时沉降位移监测方法的流程示意图;
36.图2为本技术的实施例的现浇桥梁浇筑时沉降位移监测方法的监测点横向布置图;
37.图3为本技术的实施例的现浇桥梁浇筑时沉降位移监测方法的监测点平面布置图;
38.图4为本技术的实施例的现浇桥梁浇筑时沉降位移监测方法的工作点和基准点的布置图;
39.图5为本技术的实施例的现浇桥梁浇筑时沉降位移监测方法的监测点辅助工具的示意图,左边为主视图,右边为侧视图。
具体实施方式
40.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与有关发明相关的部分。
41.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
42.参考图1,本技术的实施例中提出了一种现浇桥梁浇筑时沉降位移监测方法,包括以下步骤:
43.s1,在现浇桥梁施工过程中布设监测点、基准点和工作点,于工作点上架设全站仪用于观测基准点和监测点。
44.在具体的实施例中,在监控测量中,基准点指的是在监测过程中使用的标准数据,一般布设在稳定的结构上;工作点指的是在监测时,标准点和监测点的过渡点,也就是架设仪器的位置,一般布设在基准点和监测点都能通视的地方(非必要情况不要改变);监测点指的是需要监测的结构上所布设的点,监测点在安装后和结构成一个整体,随着结构的移动而移动。参考图2和图3,监测点设置在现浇桥梁的两侧边的箱室的隔墙下以及相邻两个箱室之间的共用隔墙下,并形成监测区域。以现浇桥梁的一跨为单位,在荷载变化最大处设一横断面,每跨首尾和中间至少设三个断面,每个断面上的监测点至少为4个,也可根据实际情况增设断面监测点。具体的,以上监测点的布点是根据结构受力情况布设,如图2所示的监测点1是由于箱梁浇筑时有向左和向下的力,同样,监测点5有向右和向下的力,因此布设监测点1和监测点5。监测点2、3、4是结构横断面中最重的部位,所以也要进行布设。
45.图2中所用的是通用图,即包含两个箱室(空心2个),事实上,一般匝道桥是1个箱室,而匝道桥和其他桥连接的过渡段少则2-3个箱室,多则6-7个箱室,也可能有更多。也就是说,每个箱室的两侧隔墙下都应该布设一个监测点,公用隔墙就布设1个(如监测点2、3、4),即监测点的总布点数是根据结构箱室的个数来确定的。
46.在具体的实施例中,参考图4,监测点和基准点以粘贴反射片的形式布设于待监测位置和监测区域周边墩柱上,基准点的布设区域包含监测区域,工作点布设在现浇桥梁的支架两侧10-30m范围内选择视线良好、避免震动和其他干扰的便于建站的位置上。在架设全站仪,开启激光功能,观察并寻找通视条件满足要求的位置布设监测点,若视线受阻,可适当移动观测标识,如图5所示,通过铆钉1和圆钢2将砧板固定在监测点上,砧板3用螺栓固定在圆钢2上可上下移动,反射片4可粘贴在砧板3上的任意位置,因此实现观测标识的移动,以调整合适的观测点。在本技术的实施例中,对全站仪的精度选择要求不高,常规项目中常用的精度为1
″
或2
″
的全站仪均可以使用,因此可有效降低布设的成本。
47.s2,基于基准点的布置点位参数和监测点的布置点位参数分别计算监测点传递误差和监测点观测误差,根据监测点传递误差、监测点观测误差计算监测点累计观测误差,判断监测点累计观测误差是否满足监测要求,若是则按布置点位参数进行现场监控测量,否则调整布置点位参数,使监测点累计观测误差满足监测要求后,进行现场监控测量。
48.在具体的实施例中,步骤s2中基准点的布置点位参数包括工作点和基准点的最大间距s1、第一角度误差θ1、第一测距误差d1、第一最大仰角θ2,监测点传递误差包括基准点误差和工作点设站误差,基准点误差包括基准点的垂直误差和基准点的位移误差,以正倒镜观测3组的方法,同精度进行自由设站误差计算,基准点的垂直误差基准点的位移误差在自由设站时,工作点设站误差包括工作点的垂直误差和工作点的位移误差,因观测的数据至少有n组数据,每组数据有斜距、天顶距和水
平角,以正倒镜观测的方法,同精度n组数据进行误差计算,工作点的垂直误差为工作点的位移误差为n为设站时基准点的个数。
49.在具体的实施例中,步骤s2中监测点的布置点位参数包括工作点到监测点的监测距离s2、第二角度误差θ3、第二测距误差d2、第二最大仰角θ4,监测点观测误差包括监测点的垂直误差和监测点的位移误差,以正倒镜观测的方法,同精度进行误差计算,监测点的垂直误差监测点的位移误差监测点累计观测误差包括监测点累计垂直误差和监测点累计位移误差;根据误差传播定律,监测点累计垂直误差监测点累计位移误差需要注意的是,在实际计算过程中以最大误差评定精度,所以计算的是各种误差的最大值。
50.具体的,在固定了仪器设备、观测方法、观测路径和观测人员后,影响监测点累计观测误差的来源只有监测点传递误差和监测点观测误差。
51.参考图4的工作点和基准点布置图,一般工作点和基准点的最大间距在50m左右,以最大间距s1为60m、第一角度误差θ1为10
″
、第一测距误差d1为2mm、第一最大仰角θ2为10
°
、正倒镜观测的方法,同精度进行自由设站误差计算,基准点的垂直误差基准点的位移误差基准点的位移误差因观测的基准点至少有3组数据,则计算时取n为3,每组数据有斜距、天顶距和水平角,以正倒镜观测的方法,同精度进行误差计算,工作点的垂直误差为工作点的位移误差为工作点的位移误差为
52.如图3所示的监测点位布置图可知,一般监测区域在两个墩柱之间的监测距离在10-40m左右,以最大监测距离s2为50m、第二角度误差θ3为10
″
、第二测距误差d2为2mm、第二最大仰角θ4为70
°
、正倒镜观测的方法,同精度进行误差计算,监测点的最大垂直误差监测点的最大位移误差
53.根据误差传播定律,监测点累计垂直误差监测点累计位移误差若每次观测误差能够满足监测要求,则可按以上数据进行现场监控测量,若不能满足要求,则适当调整有关参数,使其计算结果满足监测要求后,在进行现场监控测量。
54.s3,通过自由设站确定基准点和工作点坐标,并进行坐标转换以完成建站。
55.在具体的实施例中,步骤3具体包括:
56.利用全站仪对边测量功能精确测定第一基准点和第二基准点的水平距离l和垂直高差z后,确定第一基准点的坐标为(0,0,0),第二基准点的坐标为(l,0,z),通过自由设站获得工作点和其他基准点的坐标;
57.以至少3个基准点的坐标自由设站,以正倒镜测量坐标取其均值的方式复核每个基准点的坐标,当每个基准点和工作点误差满足限差要求时,完成初始建站;
58.进行坐标系转换,转换后的坐标系以桥梁轴线方向为x轴,y轴根据左手定则确定,z轴竖直向上,即完成建站。
59.具体的,参考图4,利用全站仪对边测量功能精确测定基准点2和基准点3的水平距离l和垂直高差z后,先确定基准点2坐标(0,0,0),基准点3坐标(l,0,z),通过自由设站获得工作点和基准点1的坐标。在以3个基准点的坐标自由设站,以正倒镜测量坐标取其均值的形式复核3个基准点的坐标,当每个基准点和工作点误差满足限差要求时,即完成初始建站,在通过坐标系转换,转换后的坐标系以桥梁轴线方向为x轴,y轴根据左手定则确定,z轴竖直向上,即完成建站。建站后,工作点和基准点正倒镜观测差值易控制在1.5mm内。
60.s4,将全站仪设立在工作点上观测得到监测点的初始坐标
△
初始值
。
61.在具体的实施例中,步骤4中监测点的初始坐标采用正倒镜测量坐标取其均值的方式采集得到,观测所有监测点坐标,存储并记录相应数据。受温度影响,每次观测前,应修正温度和气压参数。在具体的实施例中,观测时采用的是全站仪的免棱镜功能,在监测点的点位布设时反射片大致垂直于视线方向,反射片十字丝与望远镜十字丝成45
°
夹角。首次建站和初始监测值观测后,数据要按序存储至全站仪内,并预留纸质一份。
62.s5,在现浇桥梁的浇筑过程中,观测第i次监测中所有监测点的坐标
△
i正
和
△
i倒
,并通过下式计算出总位移量和沉降位移值:
63.△
i总
=(
△
i正
+
△
i倒
)/2
‑△
初始值
;
64.△
i值
=
△
i总
‑△
(i-1)总
;
65.其中,i表示第i次监测。
66.在具体的实施例中,步骤s5中以正倒镜放样模式进行点位测量,取其偏差值的均值后,观测得到所有监测点的坐标
△
i正
和
△
i倒
。
67.具体的,以正倒镜放样模式是为了找监测点的位置进行照准,照准后进行该点的观测,观测是正倒镜各测一次,两次的平均值作为该点的本次观测数据,再然后以同样的方法对其他监测点观测。监测点正倒镜观测差值易控制在2mm内。在监测过程中,因光线变化或在夜晚时,需开启激光功能,以放样模式粗略寻找点位后,用望远镜目视或寻找最亮反光点为照准目标,进行观测。且应避开震动和其他干扰区。
68.在监测过程中,只需操作者一人即可完成监测工作,无需进入支架内部,避免磕碰误伤,更加安全,并且无需二次测量,一次测量就能够得到监测值,速度更快,效率更高,成果数据处理方便且简单,无需平差。
69.本方法是在现浇桥梁浇筑过程中进行,一般少则半天,多则一两天就可结束监测,周期很短。由于人员投入不足问题,并且项目上也没有那种高精度的全站仪监测设备,因此没有办法采用很先进的手段进行测量。本方法指在采用普通全站仪对现浇梁浇筑的过程中做的沉降位移监测,侧重点在于利用普通设备进行监测的操作方法和精度分析。
70.以上描述了本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
71.在本技术的描述中,需要理解的是,术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。措词
‘
包括’并不排除在权利要求未列出的元件或步骤的存在。元件前面的措词“一”或“一个”并不排除多个这样的元件的存在。在相互不同从属权利要求中记载某些措施的简单事实不表明这些措施的组合不能被用于改进。在权利要求中的任何参考符号不应当被解释为限制范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1