一种变频控制下的打滑检测方法与流程
1.本发明涉及变频控制技术领域,尤其涉及一种变频控制下的打滑检测方法。
背景技术:
2.变频器是应用变频技术与微电子技术,通过改变电机工作电源频率方式来控制交流电动机的电力控制设备,如今,交流变频调速逐渐成为电气传动的主流,主要用于控制异步电动机的转速和转矩,此技术的应用不仅扩大了电动机的转速调节范围,使电动机转速能够从零速到高于额定转速的范围内变化,而且具有动态响应快速、工作效率高、输出特性好、使用方便等直流调速技术无可比拟的良好特性;
3.变频控制技术因其节能、高效、易维护等特点在自动控制领域得到广泛应用。然而变频控制下设备的运转却是分档的,变速的,尤其在档位速度变化比较大时对设备进行打滑精准检测比较困难,难以对设备运行状态进行判断,因此,本发明提出一种变频控制下的打滑检测方法以解决现有技术中存在的问题。
技术实现要素:
4.针对上述问题,本发明提出一种变频控制下的打滑检测方法,该变频控制下的打滑检测方法方便高效精准的对变频运行设备的运行状态进行检测,并发出报警及做出相应的保护动作,从而对设备提供有效保障。
5.为实现本发明的目的,本发明通过以下技术方案实现:一种变频控制下的打滑检测方法,包括以下步骤:
6.步骤一:设定思路,依据车轮转动时产生的摩擦力达不到要求而空转来进行检测,通过理论时间点是否经过打滑检测点来判断;
7.步骤二:固定轮检测,设定变频器频率为f;减速机速比为1:n;电机转速为n;电机极对数为p;传动轮转速为n1;传动轮转1圈的时间为t;
8.步骤三:推算时间,由步骤三推算出:电机转速为:n=60f/p(转/分钟);传动轮转速为:n1=n/n(转/分钟);传动轮转1圈的时间为:t=1/n1=n/n=np/(60f);
9.步骤四:判断打滑,计算出传动轮转1圈的时间,在传动轮上设置一个被测点,利用检测装置进行检测,打滑检测时间设定为传动轮转1圈的时间,以此检测是否打滑;
10.步骤五:移动轮检测,设定变频器频率为f;减速机速比为1:n;电机转速为n;电机极对数为p;传动轮转速为n1;传动轮的半径为r;两个传动轮之间的距离为d;传动轮移动的速度为v;两个传动轮移动的时间为t;
11.步骤六:计算时间,由步骤推算出:电机转速为:n=60f/p(转/分钟);传动轮转速为n1=n/n(转/分钟);传动轮移动的速度为v=2πr*n1/60(米/秒);两个传动轮移动的时间为t=d/v=60d/(2πr*n1)=60dn/(2πr*n)=dnp/(2πr*f)(秒);
12.步骤七:检测打滑,在两个传动轮的移动路径上设置检测装置作为检测点,以此通过频率计算出两个传动轮行走过检测点的时间,作为指定时间,用来检测是否打滑。
13.进一步改进在于:所述步骤四中,电机的极对数p、减速机的减速比n均为定值。
14.进一步改进在于:所述步骤四中,当检测装置在打滑检测时间时检测到被测点,则判断未打滑,当检测装置在打滑检测时间时未检测到被测点,则判断打滑,发出报警。
15.进一步改进在于:所述步骤七中,所述步骤七中,电机的极对数p、减速机的减速比n、传动轮半径r、两个传动轮之间的距离d均为定值。
16.进一步改进在于:当检测装置在指定时间内检测到两个传动轮行走过检测点,则判断未打滑,当检测装置在指定时间内未检测到两个传动轮行走过检测点,则判断打滑,发出警报。
17.进一步改进在于:所述步骤四和步骤七中,由于设备的运行环境和设备自身的运行状态影响,检测打滑的时间与理论时间存在误差,由此通过设定以及设备的运行环境和设备自身的运行状态,在理论时间的基础上增加一个时间常量来进行检测,作为固定时间偏移检测,增加允许打滑的空间,其中,当频率设置档位之间频率相差大时,根据不同的档位增加多个偏移时间变量进行调整。
18.进一步改进在于:所述步骤四和步骤七中,由于设备的运行环境和设备自身的运行状态影响,检测打滑的时间与理论时间存在误差,由此由此通过设定以及设备的运行环境和设备自身的运行状态,在理论时间的基础上增加一个时间常量来进行检测,将增加的时间常量改为理论时间的百分比,以此作为允许打滑的距离,构成动态时间偏移检测,不论速度的快慢,频率的大小,当打滑距离超过允许打滑的距离时,则检测为打滑故障。
19.本发明的有益效果为:
20.1、本发明通过变频器频率、减速机速比、电机极对数计算出电机转速、传动轮转速以及传动轮转1圈的时间,以计算出的传动轮转1圈的时间作为检测装置的打滑检测时间,并在传动轮上设置一个被测点,利用检测装置进行检测,根据打滑检测时间来识别被测点,以此检测是否打滑,从而对固定轮打滑检测,方便高效精准的对变频运行设备的运行状态进行检测,并发出报警及做出相应的保护动作,从而对设备提供有效保障。
21.2、本发明通过变频器频率、电机的极对数、减速机的减速比、传动轮半径、两个传动轮之间的距离d推算出电机转速、传动轮转速、传动轮移动的速度、两个传动轮移动的时间,且在两个传动轮的移动路径上设置检测装置作为检测点,通过频率计算出两个传动轮行走过检测点的时间,作为指定时间,利用检测装置在指定时间内检测两个传动轮是否行走过检测点,以此判断打滑,方便对移动轮定点打滑检测,从而高效精准的对变频运行设备的运行状态进行检测,并发出报警及做出相应的保护动作,从而对设备提供有效保障。
附图说明
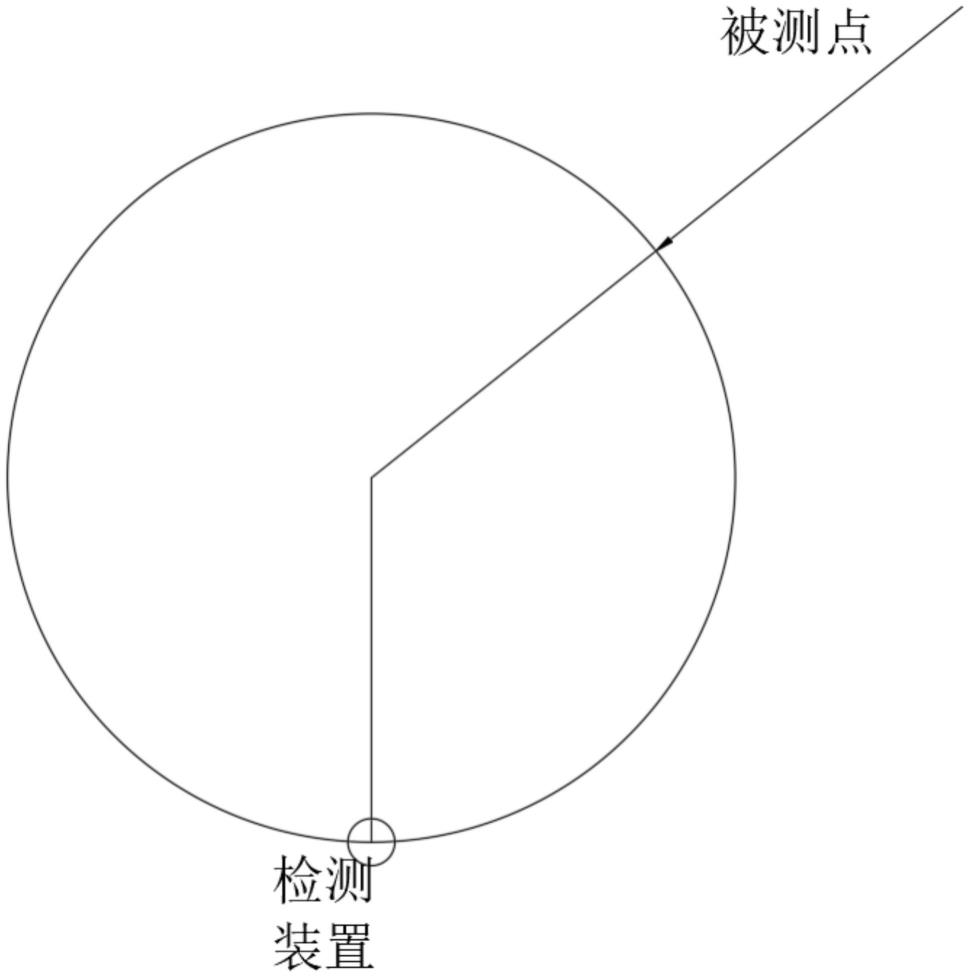
22.图1为本发明的固定轮检测示意图;
23.图2为本发明的移动轮检测示意图。
具体实施方式
24.为了加深对本发明的理解,下面将结合实施例对本发明做进一步详述,本实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
25.实施例一
26.根据图1、2所示,本实施例提出了一种变频控制下的打滑检测方法,包括以下步骤:
27.步骤一:设定思路,依据车轮转动时产生的摩擦力达不到要求而空转来进行检测,通过理论时间点是否经过打滑检测点来判断;
28.步骤二:固定轮检测,设定变频器频率为f;减速机速比为1:n;电机转速为n;电机极对数为p;传动轮转速为n1;传动轮转1圈的时间为t;
29.步骤三:推算时间,由步骤三推算出:电机转速为:n=60f/p(转/分钟);传动轮转速为:n1=n/n(转/分钟);传动轮转1圈的时间为:t=1/n1=n/n=np/(60f);
30.步骤四:判断打滑,电机的极对数p、减速机的减速比n均为定值,计算出传动轮转1圈的时间,在传动轮上设置一个被测点,利用检测装置进行检测,打滑检测时间设定为传动轮转1圈的时间,以此检测是否打滑,当检测装置在打滑检测时间时检测到被测点,则判断未打滑,当检测装置在打滑检测时间时未检测到被测点,则判断打滑,发出报警,由于设备的运行环境和设备自身的运行状态影响,检测打滑的时间与理论时间存在误差,由此通过设定以及设备的运行环境和设备自身的运行状态,在理论时间的基础上增加一个时间常量来进行检测,作为固定时间偏移检测,这种检测方式简单方便,可以增加允许打滑的空间,其中,当频率设置档位之间频率相差大时,根据不同的档位增加多个偏移时间变量进行调整;
31.步骤五:移动轮检测,设定变频器频率为f;减速机速比为1:n;电机转速为n;电机极对数为p;传动轮转速为n1;传动轮的半径为r;两个传动轮之间的距离为d;传动轮移动的速度为v;两个传动轮移动的时间为t;
32.步骤六:计算时间,由步骤推算出:电机转速为:n=60f/p(转/分钟);传动轮转速为n1=n/n(转/分钟);传动轮移动的速度为v=2πr*n1/60(米/秒);两个传动轮移动的时间为t=d/v=60d/(2πr*n1)=60dn/(2πr*n)=dnp/(2πr*f)(秒);
33.步骤七:检测打滑,电机的极对数p、减速机的减速比n、传动轮半径r、两个传动轮之间的距离d均为定值,在两个传动轮的移动路径上设置检测装置作为检测点,以此通过频率计算出两个传动轮行走过检测点的时间,作为指定时间,用来检测是否打滑,当检测装置在指定时间内检测到两个传动轮行走过检测点,则判断未打滑,当检测装置在指定时间内未检测到两个传动轮行走过检测点,则判断打滑,发出警报;由于设备的运行环境和设备自身的运行状态影响,检测打滑的时间与理论时间存在误差,由此通过设定以及设备的运行环境和设备自身的运行状态,在理论时间的基础上增加一个时间常量来进行检测,作为固定时间偏移检测,这种检测方式简单方便,可以增加允许打滑的空间,其中,当频率设置档位之间频率相差大时,根据不同的档位增加多个偏移时间变量进行调整。
34.实施例二
35.根据图1、2所示,本实施例提出了一种变频控制下的打滑检测方法,包括以下步骤:
36.步骤一:设定思路,依据车轮转动时产生的摩擦力达不到要求而空转来进行检测,通过理论时间点是否经过打滑检测点来判断;
37.步骤二:固定轮检测,设定变频器频率为f;减速机速比为1:n;电机转速为n;电机极对数为p;传动轮转速为n1;传动轮转1圈的时间为t;
38.步骤三:推算时间,由步骤三推算出:电机转速为:n=60f/p(转/分钟);传动轮转速为:n1=n/n(转/分钟);传动轮转1圈的时间为:t=1/n1=n/n=np/(60f);
39.步骤四:判断打滑,电机的极对数p、减速机的减速比n均为定值,计算出传动轮转1圈的时间,在传动轮上设置一个被测点,利用检测装置进行检测,打滑检测时间设定为传动轮转1圈的时间,以此检测是否打滑,当检测装置在打滑检测时间时检测到被测点,则判断未打滑,当检测装置在打滑检测时间时未检测到被测点,则判断打滑,发出报警,由于设备的运行环境和设备自身的运行状态影响,检测打滑的时间与理论时间存在误差,由此由此通过设定以及设备的运行环境和设备自身的运行状态,在理论时间的基础上增加一个时间常量来进行检测,将增加的时间常量改为理论时间的百分比,以此作为允许打滑的距离,可以理解为允许误差,(不论高速还是低速,检测距离一定时,时间百分比也就是距离百分比),由此构成动态时间偏移检测,不论速度的快慢,频率的大小,当打滑距离超过允许误差的值,则检测为打滑故障,能实现各频率档位的精准检测;
40.步骤五:移动轮检测,设定变频器频率为f;减速机速比为1:n;电机转速为n;电机极对数为p;传动轮转速为n1;传动轮的半径为r;两个传动轮之间的距离为d;传动轮移动的速度为v;两个传动轮移动的时间为t;
41.步骤六:计算时间,由步骤推算出:电机转速为:n=60f/p(转/分钟);传动轮转速为n1=n/n(转/分钟);传动轮移动的速度为v=2πr*n1/60(米/秒);两个传动轮移动的时间为t=d/v=60d/(2πr*n1)=60dn/(2πr*n)=dnp/(2πr*f)(秒);
42.步骤七:检测打滑,电机的极对数p、减速机的减速比n、传动轮半径r、两个传动轮之间的距离d均为定值,在两个传动轮的移动路径上设置检测装置作为检测点,以此通过频率计算出两个传动轮行走过检测点的时间,作为指定时间,用来检测是否打滑,当检测装置在指定时间内检测到两个传动轮行走过检测点,则判断未打滑,当检测装置在指定时间内未检测到两个传动轮行走过检测点,则判断打滑,发出警报;由于设备的运行环境和设备自身的运行状态影响,检测打滑的时间与理论时间存在误差,由此由此通过设定以及设备的运行环境和设备自身的运行状态,在理论时间的基础上增加一个时间常量来进行检测,将增加的时间常量改为理论时间的百分比,以此作为允许打滑的距离,可以理解为允许误差,(不论高速还是低速,检测距离一定时,时间百分比也就是距离百分比),由此构成动态时间偏移检测,不论速度的快慢,频率的大小,当打滑距离超过允许误差的值,则检测为打滑故障,能实现各频率档位的精准检测。
43.本发明通过变频器频率、减速机速比、电机极对数计算出电机转速、传动轮转速以及传动轮转1圈的时间,以计算出的传动轮转1圈的时间作为检测装置的打滑检测时间,并在传动轮上设置一个被测点,利用检测装置进行检测,根据打滑检测时间来识别被测点,以此检测是否打滑,从而对固定轮打滑检测,方便高效精准的对变频运行设备的运行状态进行检测,并发出报警及做出相应的保护动作,从而对设备提供有效保障。且本发明通过变频器频率、电机的极对数、减速机的减速比、传动轮半径、两个传动轮之间的距离d推算出电机转速、传动轮转速、传动轮移动的速度、两个传动轮移动的时间,且在两个传动轮的移动路径上设置检测装置作为检测点,通过频率计算出两个传动轮行走过检测点的时间,作为指定时间,利用检测装置在指定时间内检测两个传动轮是否行走过检测点,以此判断打滑,方便对移动轮定点打滑检测,从而高效精准的对变频运行设备的运行状态进行检测,并发出
报警及做出相应的保护动作,从而对设备提供有效保障。
44.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1