用于位置姿态检测的三轴加速度计的精度补偿方法与流程
本公开涉及无线通信技术,尤其涉及一种用于位置姿态检测的三轴加速度计的精度补偿方法。
背景技术:
1、目前,一般通过工参采集仪获取移动通信基站天线工程参数(下简称“工参”)。其中,工参包括天线的方位角、下倾角、挂高。一般通过工参采集仪中的三轴加速计采集天线的加速度,然后根据采集的加速度,通过工参采集仪中的微控制单元(microcontrollerunit,mcu)计算得到下倾角。工参采集仪一般安装在基站天线的顶端,工作在空旷的户外,而基站天线分布在全国各地。可以通过提高三轴加速计的测量精度,来提高下倾角的获取精度。
2、现有技术中,工参采集仪通过对三轴加速计进行简单的零偏和标度因子校准(即对三轴加速计采集的原始数据进行统一的加数或者减数),来提高三轴加速计的测量精度。
3、但是,通过这种方式得到的三轴加速计的测量精度仍有待提高。
技术实现思路
1、本公开提供了一种用于位置姿态检测的三轴加速度计的精度补偿方法,以解决现有技术中三轴加速计的测量精度仍有待提高的问题。
2、根据本公开第一方面,提供了一种确定三轴加速计的补偿参数的方法,包括:
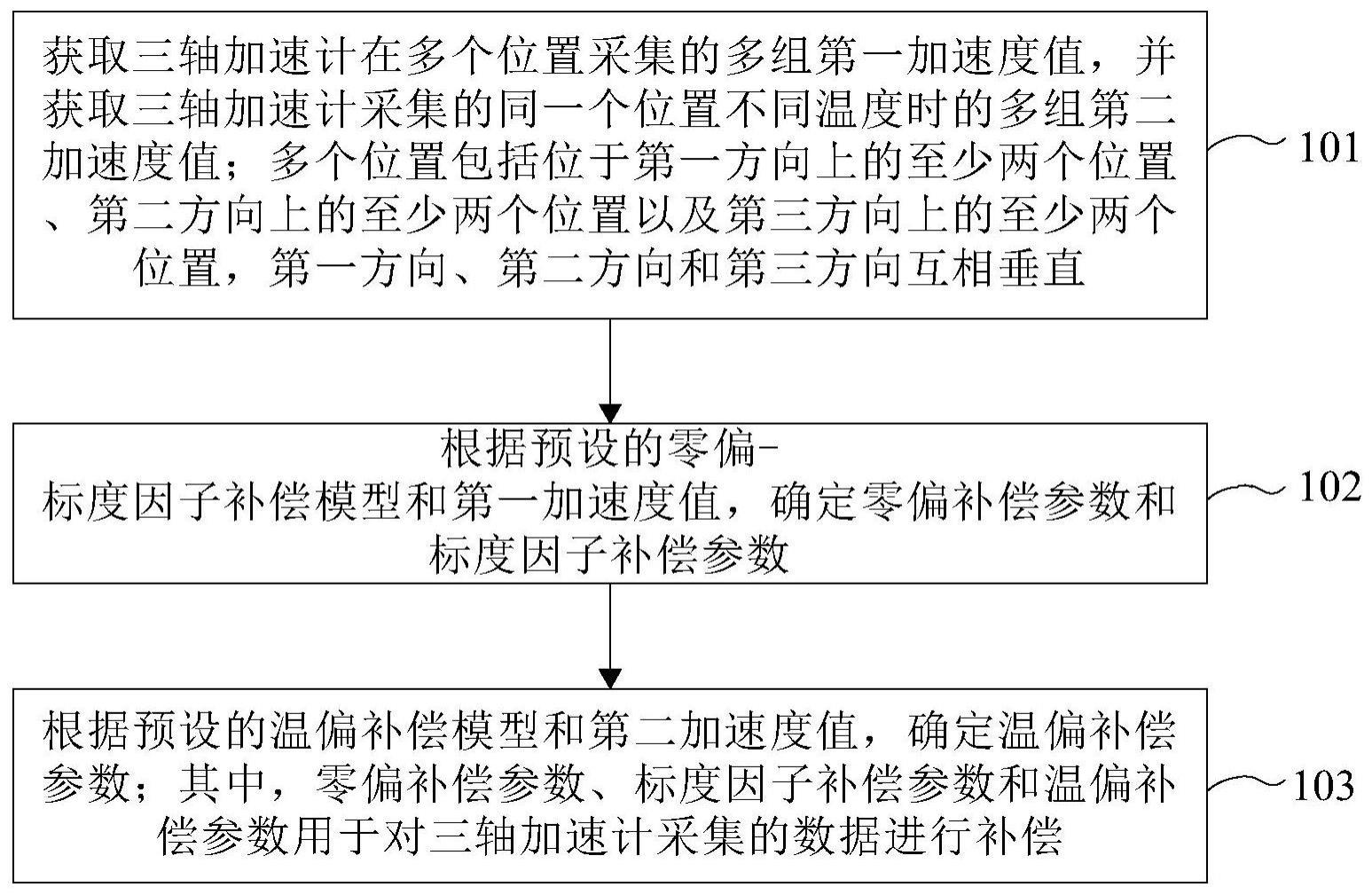
3、获取所述三轴加速计在多个位置采集的多组第一加速度值,并获取所述三轴加速计采集的同一个位置不同温度时的多组第二加速度值;所述多个位置包括位于第一方向上的至少两个位置、第二方向上的至少两个位置以及第三方向上的至少两个位置,所述第一方向、所述第二方向和所述第三方向互相垂直;
4、根据预设的零偏-标度因子补偿模型和所述第一加速度值,确定零偏补偿参数和标度因子补偿参数;
5、根据预设的温偏补偿模型和所述第二加速度值,确定温偏补偿参数;
6、其中,所述零偏补偿参数、标度因子补偿参数和所述温偏补偿参数用于对所述三轴加速计采集的数据进行补偿。
7、在一种可实现方式中,还包括:
8、构建空间坐标系,所述空间坐标系包括x方向、y方向和z方向;
9、所述获取所述三轴加速计在多个位置采集的多组第一加速度值,包括:
10、获取所述三轴加速计在位于所述x方向的正方向的位置处,采集的x正加速度值;
11、获取所述三轴加速计在位于所述x方向的负方向的位置处,采集的x负加速度值;
12、获取所述三轴加速计在位于所述y方向的正方向的位置处,采集的y正加速度值;
13、获取所述三轴加速计在位于所述y方向的负方向的位置处,采集的y负加速度值;
14、获取所述三轴加速计在位于所述z方向的正方向的位置处,采集的z正加速度值;
15、获取所述三轴加速计在位于所述z方向的负方向的位置处,采集的z负加速度值。
16、在一种可实现方式中,所述根据预设的零偏-标度因子补偿模型和所述第一加速度值,确定零偏补偿参数和标度因子补偿参数,包括:
17、获取所述零偏-标度因子补偿模型,其中,所述零偏-标度因子补偿模型中包括未知的零偏补偿参数和未知的标度因子补偿参数;
18、根据各组所述第一加速度值,确定所述零偏-标度因子补偿模型中的零偏补偿参数的数值和标度因子补偿参数的数值。
19、在一种可实现方式中,其中,所述三轴加速计采集的一组第一加速度值中,包括第一方向的加速度值、第二方向的加速度值以及第三方向的加速度值;
20、所述零偏-标度因子补偿模型为:
21、v=[k1(x0-b1)]2+[k2(y0-b2)]2+[k3(z0-b3)]2
22、其中,x0为第一加速度值中的第一方向加速度值,y0为第一加速度值中的第二方向加速度值,z0为第一加速度值中的第三方向加速度值,b1为x0的零偏补偿参数,b2为y0的零偏补偿参数,b3为z0的零偏补偿参数,k1为x0的标度因子补偿参数,k2为y0的标度因子补偿参数,k3为z0的标度因子补偿参数。
23、在一种可实现方式中,所述根据各组所述第一加速度值,确定所述零偏-标度因子补偿模型中的零偏补偿参数的数值和标度因子补偿参数的数值,包括:
24、根据所述零偏-标度因子补偿模型,生成雅各比矩阵;
25、根据各组所述加速度值、所述雅各比矩阵,确定零偏-标度因子补偿模型中的零偏补偿参数的数值和标度因子补偿参数的数值。
26、在一种可实现方式中,还包括:获取采集所述第二加速度值时的温度值;所述温度值与所述第二加速度值具有对应关系;
27、所述根据预设的温偏补偿模型和所述第二加速度值,确定温偏补偿参数,包括:
28、获取所述温偏补偿模型,所述温偏补偿模型中包括未知的温偏补偿参数;
29、根据具有对应关系的所述温度值与所述第二加速度值,确定所述温偏补偿模型中的温偏补偿参数的数值。
30、在一种可实现方式中,所述第二加速度值包括第一方向的加速度值、第二方向的加速度值以及第三方向的加速度值;
31、所述温偏补偿模型包括:
32、yx=y′x+ax1t+ax2t2+…+axntn
33、其中,t为所述温度值,yx为与所述温度值对应的第二加速度值中的第一方向加速度值,ax1,ax2,…,axn为所述第一方向加速度值的温偏补偿参数,y′x用于表征温度补偿前的未知的加速度值中的第一方向加速度值;
34、yy=y′y+ay1t+ay2t2+…+ayntn
35、其中,t为所述温度值,yy为与所述温度值对应的第二加速度值中的第二方向加速度值,ay1,ay2,…,ayn为第二方向加速度值的温偏补偿参数,y′y用于表征温度补偿前的未知的加速度值中的第二方向加速度值;
36、yz=y′z+ax1t+az2t2+…+azntn
37、其中,t为所述温度值,yz为与所述温度值对应的第二加速度值中的第三方向加速度值,az1,az2,…,azn为第三方向加速度值的温偏补偿参数,y′z用于表征温度补偿前的未知的加速度值中的第三方向加速度值。
38、根据本公开第二方面,提供了一种基站天线下倾角的检测方法,包括:
39、获取三轴加速计采集的原始加速度值,并获取采集所述原始加速度值时的温度值;所述温度值与所述原始加速度值具有对应关系;
40、获取温偏补偿参数,并根据所述温偏补偿参数和所述温度值对所述原始加速度值进行补偿,确定第三加速度值;
41、获取零偏补偿参数的数值和标度因子补偿参数的数值,并根据所述温偏补偿参数和所述标度因子补偿参数对所述第三加速度值进行补偿,确定第四加速度值;
42、根据所述第四加速度值,确定所述基站天线的原始下倾角;
43、根据预设的水平校准值对所述原始下倾角进行校准,得到水平校准后的所述基站天线的目标下倾角。
44、在一种可实现方式中,所述预设的水平校准值为根据所述基站天线在水平面上时检测的下倾角的值确定的。
45、根据本公开第三方面,提供了一种确定三轴加速计的补偿参数的装置,包括:
46、获取单元,用于获取所述三轴加速计在多个位置采集的多组第一加速度值,并获取所述三轴加速计采集的同一个位置不同温度时的多组第二加速度值;所述多个位置包括位于第一方向上的至少两个位置、第二方向上的至少两个位置以及第三方向上的至少两个位置,所述第一方向、所述第二方向和所述第三方向互相垂直;
47、参数确定单元,用于根据预设的零偏-标度因子补偿模型和所述第一加速度值,确定零偏补偿参数和标度因子补偿参数;
48、参数确定单元,还用于根据预设的温偏补偿模型和所述第二加速度值,确定温偏补偿参数;
49、其中,所述零偏补偿参数、标度因子补偿参数和所述温偏补偿参数用于对所述三轴加速计采集的数据进行补偿。
50、根据本公开第四方面,提供了一种基站天线下倾角的检测装置,包括:
51、获取单元,用于获取三轴加速计采集的原始加速度值,并获取采集所述原始加速度值时的温度值;所述温度值与所述原始加速度值具有对应关系;
52、补偿单元,用于获取温偏补偿参数,并根据所述温偏补偿参数和所述温度值对所述原始加速度值进行补偿,确定第三加速度值;
53、补偿单元,还用于获取零偏补偿参数的数值和标度因子补偿参数的数值,并根据所述温偏补偿参数和所述标度因子补偿参数对所述第三加速度值进行补偿,确定第四加速度值;
54、确定单元,用于根据所述第四加速度值,确定所述基站天线的原始下倾角;
55、水平校准单元,用于根据预设的水平校准值对所述原始下倾角进行校准,得到水平校准后的所述基站天线的目标下倾角。
56、根据本公开第五方面,提供了一种电子设备,包括存储器和处理器;其中,
57、所述存储器,用于存储计算机程序;
58、所述处理器,用于读取所述存储器存储的计算机程序,并根据所述存储器中的计算机程序执行如第一方面、第二方面所述的任一种方法。
59、根据本公开第六方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当处理器执行所述计算机执行指令时,实现如第一方面、第二方面所述的任一种方法。
60、根据本公开第七方面,提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时,实现如第一方面、第二方面所述的任一种方法。
61、本公开提供的用于位置姿态检测的三轴加速度计的精度补偿方法,包括:获取三轴加速计在多个位置采集的多组第一加速度值,并获取三轴加速计采集的同一个位置不同温度时的多组第二加速度值;多个位置包括位于第一方向上的至少两个位置、第二方向上的至少两个位置以及第三方向上的至少两个位置,第一方向、第二方向和第三方向互相垂直;根据预设的零偏-标度因子补偿模型和第一加速度值,确定零偏补偿参数和标度因子补偿参数;根据预设的温偏补偿模型和第二加速度值,确定温偏补偿参数;其中,零偏补偿参数、标度因子补偿参数和温偏补偿参数用于对三轴加速计采集的数据进行补偿。本方案提供的确定用于位置姿态检测的三轴加速度计的精度补偿方法中,可以根据预设的零偏-标度因子补偿模型以及三轴加速计在多个位置的多组采集值,确定零偏补偿参数和标度因子补偿参数;可以根据预设的温偏补偿模型、以及三轴加速计在同一个位置不同温度时的多组采集值,确定温偏补偿参数;得到的零偏补偿参数和标度因子补偿参数、温偏补偿参数可用于对三轴加速计采集的数据进行补偿,进而提高了三轴加速计的测量精度。
- 还没有人留言评论。精彩留言会获得点赞!