基于风向区间限定的船载地波雷达无模糊风向估计方法与流程
1.本发明涉及一种海面风向的测量方法,具体涉及一种基于风向区间限定的船载地波雷达海面风向大范围测量方法。
背景技术:
2.海洋表面风场是海洋-大气动力系统中的重要因素,也是海浪形成的直接动力和全球及区域海洋环流的关键驱动。因此,准确地观测海面风场有利于监测海洋环境要素的变化和预报海洋气象灾害,对海洋航运、海洋工程建设以及海洋捕捞与养殖等具有非常重要的意义。海面风向是风场的一个重要要素,目前观测手段主要有传统现场监测和遥感遥测。传统现场监测主要是通过风向计、浮标等现场设备获取海面风向,具有测量精度高、测量时间间隔短等特点,但受观测手段的限制,只能获取传感器周边的风场资料,观测范围有限。相对而言,卫星散射计和地波雷达能够对较大范围的海面风场进行监测。其中,卫星散射计覆盖的区域最大,但也存在重访周期长、成本高等问题,且易受天气因素影响。而地波雷达虽覆盖的空间范围相对卫星较小,但能够实现海面风场的全天候连续实时监测。
3.地波雷达根据平台类型的不同可以分为岸基地波雷达和船载地波雷达。岸基地波雷达布设在海岸线上,需要利用大型接收天线阵列进行海面风向提取,占据稀缺的海岸线资源,且探测海域固定。而船载地波雷达布设在机动灵活的船载平台上,突破了岸基地波雷达探测区域固定的限制,进一步扩大了观测海域的范围,提高了雷达的适用性与灵活性,为大范围海面风场信息的监测提供了一种新的有效探测手段。
4.目前,应用船载地波雷达提取海面风向的方法近几年才被提出,且可以分为单站船载和多站船载两大类。在基于单站船载地波雷达风向反演方法中,往往通过假设观测海域的风向不变或缓慢变化,利用多个相邻波束风向值的相关性(sun et al.,2015;yao et al.,2017)或风向与展宽一阶回波谱的关系(周启豪等,2017)来消除风向模糊,但该方法均未考虑风速的影响,风向估计误差可能较大;此外,还可利用邻近海元的风向与扩展因子曲线的唯一交点来提取真实风向(xie et al.,2018;),但该方法对于雷达探测边缘海域估计存在大幅误差,并且由于背景噪声和测量误差的存在,风向与扩展因子曲线存在无交点的情况,此时该方法失效。对于多站船载地波雷达,可充分利用船载平台的运动特性,在提取同步探测区域中的真实风向更具有优势,理论上比单站船载地波雷达具有更高的准确性(zhao et al.,2020),但该方法对船载平台航行条件的要求较高,复杂度增加。
5.相关的参考文献如下:
6.[1]m.sun,j.xie,z.ji,and w.cai,“remote sensing of ocean surface wind direction with shipborne high frequency surface wave radar,”in proc.ieee radar conf.,2015,pp.0039-0044.
[0007]
[2]j.xie,g.yao,m.sun,z.ji,g.li,and j.geng,“ocean surface wind direction inversion using shipborne high-frequency surface wave radar,”ieee geosci.remote sens.lett.,vol.14,no.8,pp.1283-1287,2017.
[0008]
[3]q.zhou,“analysis and processing of the first-order sea echo observed by shipborne hf surface wave radar,”master thesis,wuhan university,2017.
[0009]
[4]j.xie,g.yao,m.sun,and z.ji,“measuring ocean surface wind field using shipborne high-frequency surface wave radar,”ieee trans.geosci.remote sens.,vol.56,no.6,pp.3383-3397,2018.
[0010]
[5]j.zhao,y.tian,b.wen,and z.tian,“unambiguous wind direction field extraction using a compact shipborne high-frequency radar,”ieee trans.geosci.remote sens.,vol.58,no.10,pp.7448-7458,2020.
技术实现要素:
[0011]
本发明的目的是提供一种基于风向区间限定的船载地波雷达无模糊风向估计方法,该方法将风速、噪声、船速、海流等因素考虑在内,充分利用船载地波雷达一阶回波谱展宽范围内频点幅值信息随风向规律变化的特点,结合风向与雷达波束方位的关系来初步估计风向区间,实际风向必定落在风向区间内,进而将消除风向模糊问题转换为判断风向区间与两个相邻频点的风向-扩展因子曲线的位置关系,实现船载地波雷达海洋表面风向的大范围测量。
[0012]
基于风向区间限定的船载地波雷达无模糊风向估计方法,其特征在于包括以下步骤:
[0013]
步骤1:提取一阶回波谱展宽范围内有效频点信息
[0014]
首先根据船载平台的船速和探测海域内的海流信息提取船载地波雷达一阶回波谱的展宽范围;提取正、负一阶回波谱展宽范围内有效频点信息;然后根据最大类间、类内方差比法确定的最佳阈值th来区分一阶回波谱展宽范围内有效频点和背景噪声;最后利用形态学滤波提取一阶回波谱展宽范围内的有效频点信息;
[0015]
步骤2:建立风向与扩展因子曲线关系模型
[0016]
基于步骤1获得的有效频点信息,确定有效频点对应的回波方位角及幅值信息,利用正、负一阶bragg(布拉格)峰的相对强度建立有效频点对应的风向与扩展因子的对应关系,并提取关于雷达波束对称的模糊风向;
[0017]
步骤3:提取一阶回波谱对应的风向
[0018]
基于步骤1,提取任一个距离单元下的正、负一阶回波谱展宽范围内有效频点的归一化幅值及多普勒频率信息;将正、负一阶回波谱展宽边界频点及与其左或右相邻的2个频点作为边界有效频点,分别建立正、负一阶回波谱左、右边界有效频点归一化幅值差随风向变化的关系模型;通过计算并比较正、负一阶回波谱左、右边界有效频点的归一化幅值差的大小关系即可提取一阶回波谱对应的风向,即谱图风向;
[0019]
步骤4:初步估计风向区间
[0020]
假设小片海域内风向是不变或者缓慢变化的,认为雷达探测海域中前10个距离元以内的海域满足假设条件,基于步骤3,提取前4-10个距离单元中任一个距离单元对应的谱图风向;基于步骤1和步骤2,提取该距离单元下的一阶回波谱展宽范围内全部有效频点对应的模糊风向,筛选与谱图风向最接近的风向,并建立该距离单元下的风向与雷达波束方
位的关系模型,确定最小风向估计误差对应的雷达波束方位;统计该雷达波束方位4-10个距离单元内的频点的风向估计结果来初步估计风向区间,雷达探测海域内的实际风向必定落在风向区间内;
[0021]
步骤5:利用风向区间限定风向-扩展因子曲线及其交点的位置关系来提取真实风向
[0022]
基于步骤4,从步骤2中的模糊风向提取真实风向的过程转换为判断风向区间与两个相邻频点——所求风向频点a和相邻频点b——的风向-扩展因子曲线的位置关系,进而实现船载地波雷达的无模糊风向估计;
[0023]
风向区间与两组风向-扩展因子曲线的位置关系有四种情况:
[0024]
(1)两组风向-扩展因子曲线有唯一交点,若交点位于风向区间内,则交点对应的风向为真实风向,否则风向为异常值,剔除;
[0025]
(2)两组风向-扩展因子曲线有两个或以上交点,若其中只有一个交点位于风向区间,则该交点对应的风向为真实风向;若无交点位于风向区间,则为异常值,剔除;若有多个交点位于风向区间内,其中只有一个交点对应的风向为真实风向,此时利用相邻频点的风向相关性来提取真实风向;
[0026]
(3)若两组风向-扩展因子曲线无交点,但风向区间与频点a的曲线相交,此时频点a在风向区间内的曲线上只有一个点对应的风向为真实风向,由于相邻频点风向变化缓慢或者不变,设置风向误差,利用同一距离单元下多个相邻频点的风向相关性来提取真实风向;
[0027]
(4)若两组风向-扩展因子曲线无交点,且风向区间与频点a的曲线不相交,此时风向为异常值,需剔除;
[0028]
步骤6:重复上述步骤1-步骤5,最终得到不同距离单元下风向的方位和大小信息。
[0029]
所述的基于风向区间限定的船载地波雷达无模糊风向估计方法,其特征在于还包括步骤7:绘制风向场。
[0030]
基于步骤6,为了使绘制的风向图美观,需要对角度单元进行重新划分,并对距离-方位风向矩阵中的异常数据进行处理,最终可获得雷达探测海域内完整的风向场。
[0031]
与现有技术相比,本发明的创新之处体现在以下方面:
[0032]
1.充分利用船载平台的运动特性和展宽一阶回波谱波形变化的特点,在船载平台运动过程中即可实现海面风向的提取。不同与常规的多波束采样法,本发明利用一阶回波谱展宽范围内频点幅值信息随风向变化的特点,结合风向与雷达波束方位的关系,将消除风向模糊问题转换为判断风向区间与两个相邻频点的风向-扩展因子曲线及其交点的位置关系,解决了单站船载地波雷达风向估计中的doa模糊问题。
[0033]
2.风向提取方法充分考虑了船速、风速、背景噪声和波浪定向传播模型测量误差的影响,提高了风向测量的精度,尤其是雷达探测边缘海域。本发明利用波浪定向传播模型分析了风向估计误差与雷达波束方位的关系,通过统计最小风向误差对应的雷达波束方位内的4-10距离单元下有效频点的风向估计结果来初步估计风向区间,利用风向区间消除风向模糊可以降低船速、风速和噪声对风向估计精度的影响。
[0034]
3.融入船载地波雷达探测海区的海态参数及船只运动特性,提升海面风向监测能力。将海区的历史海流极值参数化,并结合船载平台运动特性来提取一阶回波谱的展宽范
围,同时利用最大类间、类内方差比法区分有效频点与噪声信息,减小噪声对风向监测的影响,利用有效频点信息进行估计风向,更加贴近实际应用。
[0035]
4.首次将风向区间的概念引入到风向反演方法流程中,同时首次利用卫星散射计观测风向对船载地波雷达风向提取结果进行大范围对比验证,评估雷达风向估计的精度,证船载地波雷达进行风向测量的可行性。
[0036]
本发明基于船载地波雷达实现了超视距、全天候、大范围海洋表面风向的测量。通过展宽一阶回波谱随风向变化的规律,综合考虑风速、背景噪声、船速和测量误差对风向提取的影响,利用初步估计的风向区间限定风向-扩展因子曲线的位置关系来消除风向模糊,提高了风向估计的精度,实现了船载地波雷达海洋表面风向的大范围监测。
附图说明
[0037]
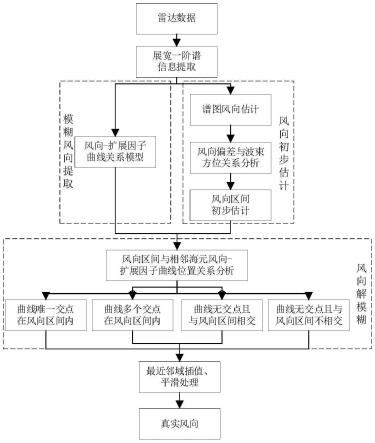
图1为本发明的基本流程示意图。
[0038]
图2为任一个距离单元上相邻频点示意图。
[0039]
图3为船载地波雷达风向分布图。
[0040]
图4为一阶回波谱边界有效频点归一化幅值差与风向关系图。
[0041]
图5为风向与雷达波束关系图。
[0042]
图6为风向区间与风向-扩展因子曲线位置关系
[0043]
图7为船载地波雷达测量的风向场
[0044]
图8为船载地波雷达测量的风向统计直方图
[0045]
图9为船载地波雷达与cfosat观测风向比较图
[0046]
图10为船载地波雷达与cfosat比较风向的散点图
[0047]
图11为船载地波雷达测量风向误差直方图
具体实施方式
[0048]
下面结合公式和附图,对本发明的方法做进一步说明。
[0049]
如图1所示,基于风向区间限定的船载地波雷达无模糊风向估计方法,主要包括1)提取一阶回波谱展宽范围内有效频点信息,2)建立风向与扩展因子曲线关系模型,3)提取谱图风向,4)通过分析风向与雷达波束的关系来初步估计风向区间,5)利用风向区间限定风向-扩展因子曲线及其交点的位置关系来提取真实风向,其具体步骤如下:
[0050]
步骤1:提取正、负一阶回波谱的展宽范围及有效频点信息
[0051]
根据船速和雷达探测海区内海流信息提取船载地波雷达一阶回波谱的展宽范围:
[0052]
[-f
b-2v
p
/λ-f
cr
,-fb+2v
p
/λ+f
cr
]∪[f
b-2v
p
/λ-f
cr
,fb+2v
p
/λ+f
cr
]
ꢀꢀꢀ
(1)其中,fb为岸基地波雷达多普勒频率,v
p
为船速(m/s),f
cr
=2v
cr
/λ=2vcsinθ/λ为海流导致的多普勒频移,v
cr
为径向流(m/s),vc为矢量流(m/s)。
[0053]
提取正、负一阶回波谱展宽范围内有效频点信息,频点a对应的回波方位角为θa,如图2所示,且频点a对应的多普勒频率fd为:
[0054][0055]
通过最大类间、类内方差比法确定最佳分割阈值th来实现有效频点和背景噪声的
分离:将船载地波雷达获取的正或负一阶回波谱数据大小记为m
×
n,m为距离单元数,n为多普勒单元数;确定正或负一阶回波谱展宽范围内频点的最大幅值为t
max
和最小幅值为t
min
,单位为db,并选择初始阈值t0且满足t
min
≤t0≤t
max
;通过初始阈值t0将正或负一阶回波谱展宽范围内的频点划分为ca和cb两部分,其中ca中的频点幅值为xi(i=1,2
…
n1),i代表多普勒单元数,cb中的频点幅值为yj(j=1,2
…
n2),j代表距离单元数,且n1+n2=m
×
n;然后分别求取ca和cb两部分中频点的幅度均值、幅度方差、及正或负一阶回波谱展宽范围内所有频点幅度均值:
[0056][0057]
式中,μa和为ca部分内频点的幅度均值和幅度方差,μb和为cb部分内频点的幅度均值和幅度方差,μ为正或负一阶回波谱展宽范围内所有频点的幅度均值。
[0058]
计算ca和cb两部分内频点幅值的分布概率p1和p2:
[0059][0060]
其中,xx为ca部分中频点幅值为xi的频点个数,yy为cb部分中频点幅值为yj的频点个数。
[0061]
计算两类数据的类间方差和类内方差
[0062][0063]
调节初始阈值t0,确定最佳阈值th(t
min
≤th≤t
max
),使得方差比β最大:
[0064][0065]
根据确定的最佳阈值th来将正或负一阶回波谱展宽范围内有效频点和背景噪声进行分离,并将有效频点标志为1,背景噪声标记为0:
[0066][0067]
步骤2:建立风向与扩展因子曲线关系模型
[0068]
将船载地波雷达正、负一阶回波谱能量的相对大小定义为:
[0069][0070]
其中,b
+
和b-表示正、负一阶回波谱的真实强度:
[0071][0072]
有向波高谱s(
·
)可以表示为pierson-moskowiz谱f(
·
)和修正的余弦函数模型g(
·
)的乘积:
[0073][0074]
其中
[0075][0076][0077]
其中,ωd为多普勒频率,g为重力加速度,kc为剪切波数,ε代表示逆风、顺风回波强度比,经验值ε=0.004,s为扩展因子,表示海浪能量对于风向的离散程度,与风速有关,取值范围为1-8;ψ为波向方向α与雷达波束指向θ的夹角,如图3所示。对于充分发展的海域,波向方向α与风向α
*
一致,α
*
以船载平台法线为参考方向,顺时针为正。
[0078]
因此,公式(8)可以写成:
[0079][0080]
定义进而得到修正的余弦函数模型下的风向-扩展因子关系:
[0081][0082]
式中,为在扩展因子s下的风向,
±
代表风向的模糊性。
[0083]
步骤3:提取一阶回波谱对应的风向
[0084]
基于步骤1,提取任一个距离单元下正、负一阶回波谱展宽范围内有效频点的归一化幅值及多普勒频率信息;定义风向l从0
°
变化到360
°
,风向变化间隔为3
°
;正一阶回波谱展宽范围内有效频点在风向l下的归一化幅值为pa
n1
(l),al,al+1,
…
ar-1,ar为正一阶回波
谱展宽范围内频点的位置(相对于速度为0m/s的多普勒频点),al和ar为正一阶回波谱左边界和右边界频点的位置;负一阶回波谱展宽范围内有效频点在风向l下的归一化幅值为pb
n2
(l),br,br+1,
…
bl-1,bl为负一阶回波谱频点的位置(相对于速度为0m/s的多普勒频点),bl和br为负一阶回波谱左边界和右边界频点的位置。选择正、负一阶回波谱展宽边界频点及与其左或右相邻的2个频点作为边界有效频点,利用公式(15)建立正、负一阶回波谱的左、右边界有效频点归一化幅值差与风向的变化关系,
[0085][0086]
其中,w
+
(l)、w-(l)分别表示在风向l下的正、负一阶回波谱边界有效频点的幅值差,结果如图4所示。
[0087]
根据图4可知,一阶回波谱展宽边界有效频点的归一化幅值差随风向有规律变化,其特点如下:
[0088]
(1)当风向位于0
°
~90
°
,w
+
≥w-≥0;当风向位于90
°
~180
°
,w-≥w
+
≥0;当风向位于180
°
~270
°
,w-≤w
+
≤0;当风向位于270
°‑
360
°
,w
+
≤w-≤0。
[0089]
(2)当风向位于0
°
~180
°
,正、负边界有效频点的归一化幅值差均大于0db,即w
+
≥0,w-≥0,表现在正一阶回波谱左边界有效频点的幅值和大于右边界有效频点的幅值和,负一阶回波谱右边界有效频点的幅值和大于左边界有效频点的幅值和。
[0090]
(3)当风向位于180
°
~360
°
,正、负一阶回波谱边界有效频点的归一化幅值差均小于0db,即w
+
≤0,w-≤0,表现在正一阶回波谱右边界有效频点的幅值和大于左边界有效频点的幅值和,负一阶回波谱左边界有效频点的幅值和大于右边界有效频点的幅值和。
[0091]
通过计算并比较一阶回波谱展宽边界有效频点的归一化幅值差w
+
和w-的大小来提取谱图风向是可行的。
[0092]
步骤4:初步估计风向区间
[0093]
基于步骤3,提取4~10个距离单元中任一个距离单元对应的谱图风向,以其中某一距离单元对应的谱图风向为156
°
为例,基于步骤2,提取该距离单元下一阶回波谱展宽范围内有效频点对应的模糊风向,选择与谱图风向最接近的风向,并建立该距离单元下风向与雷达波束方位的关系,结果如图5所示。由于测量误差和噪声的存在,估计的风向会偏离谱图风向(黑色虚线),其偏离程度与风向和雷达波束夹角大小有关。当风向与雷达波束的夹角较大时,风向估计的误差较小,反之,风向估计误差较大。
[0094]
假设小片海域内风向是不变或者缓慢变化的,在步骤3提取谱图风向后,基于风向估计误差与雷达波束方位的关系(如图5所示),统计最小风向估计误差对应的雷达波束方位4~10个距离单元内的有效频点的风向分布情况来初步估计风向区间,实际风向必定落在这个区间中。图5中的黑色方框范围内估计的风向值误差最小(基本分布在谱图风向156
°
附近),谱图风向为156
°
对应的雷达波束方位范围为-90
°
~0
°
,统计实测雷达数据在这个波束方位4-10个距离单元范围内的频点的风向分布情况,即可得到真实风向区间,雷达探测
海域内的实际风向必定落在风向区间内。
[0095]
步骤5:消除风向模糊
[0096]
假设求取图2中频点a的风向,根据雷达距离和角度分辨率,将频点a的位置记为x
i,j
,且频点a可以根据式(14)建立一组风向与扩展因子曲线关系,如图6中黑色实线曲线所示。同样,相邻频点b(x
i,j-1
)也可以通过式(14)获得一组风向与扩展因子的曲线关系,如图6黑色虚线曲线所示。步骤4确定的风向区间用黑色点划线表示。对于充分发展的海域,风向在空间上是缓慢变化或不变的,两组曲线的唯一交点对应的风向为真实风向。由于测量误差和背景噪声的存在,两组曲线可能存在多个交点和无交点等情况。本发明利用初步估计的风向区间限定两个相邻频点的风向-扩展因子曲线及其交点的位置来提取真实风向。风向区间与两组风向-扩展因子曲线的位置关系如下:
[0097]
(1)两组风向-扩展因子曲线有唯一交点,若交点位于风向区间内,如图6(a),则交点对应的风向为真实风向,否则风向为异常值,剔除。
[0098]
(2)两组风向-扩展因子曲线有多个(两个以上)交点,若其中只有一个交点位于风向区间,则该交点对应的风向为真实风向;若无交点位于风向区间,则为异常值,剔除;若有多个交点位于风向区间内,如图6(b),其中只有一个交点对应的风向为真实风向。由于相邻频点的风向相关性最大,设频点a在风向区间内的所有交点对应的风向为选择距离频点a最近且具有真实风向的频点d,频点d的位置为y
i,j
,通过公式(16)来提取频点a的真实风向
[0099][0100]
其中,l1为风向区间内两组曲线交点对应的风向个数,x
i,j
和y
i,j
分别表示频点a和d在多普勒i和距离j处的位置。
[0101]
(3)两组风向-扩展因子曲线无交点,但风向区间与频点a的曲线相交,如图6(c)。此时,频点a在风向区间内的曲线上只有一个点对应的风向为真实风向。由于相邻频点风向变化缓慢或者不变,设频点a在风向区间内的所有风向为与a左右相邻5个频点的风向均值为风向误差δ为设定值;通过公式(17)来提取频点a的真实风向η
*
。
[0102][0103]
其中,l2为频点a的曲线在风向区间内对应的风向个数。
[0104]
(4)两组风向-扩展因子曲线无交点,且风向区间与频点a的曲线不相交,如图6(d),此时风向为异常值,需剔除。
[0105]
通过步骤5即可获取频点a的真实风向,同一距离单元下的其他频点的真实风向均可采用步骤6获取;
[0106]
步骤6:其他条件不变,重复上述步骤1~步骤5,最终可以得到不同距离单元下风向的方位和大小信息。
[0107]
步骤7:雷达风向场的绘制
[0108]
基于步骤6,为了使绘制的风向图美观,需要对风向矩阵中的角度单元重新划分,设置角度分辨率为4,对距离-方位风向矩阵中的落在同一角度单元内的风向取均值作为当前海面单元的风向;若距离-方位风向矩阵中的风向没有在重新划分的角度单元内,通过最
近邻域插值来获取真实风向,进而获得雷达探测海域内完整的风向场。
[0109]
采用以下实施例验证本发明的有益效果:
[0110]
实施例一:
[0111]
实验中采用的数据来源于在威海海域获取的船载地波雷达数据,雷达发射频率4.7mhz,带宽60khz,相干积累时间128s,平均船速为2.3m/s,船载平台艏向为292.7864
°
,距离分辨率2.5km。
[0112]
图7为船载地波雷达在探测海域测量的风向分布图,风向主要由西北向东南缓慢变化。
[0113]
图8为船载地波雷达在探测海域测量的风向统计直方图,雷达估计的风向样本共1085个。船载地波雷达测量的风向主要分布在90
°
~180
°
,平均风向为155.5317
°
,风向标准差为13.8403
°
,其中约54%的风向数据样本分布在155
°
~162.5
°
(黑色实线),考虑风向
±
10
°
的波动,约74%的风向数据样本分布在145
°
~172.5
°
(黑色虚线)。
[0114]
实施例二:
[0115]
为了验证船载地波雷达风向测量结果的准确性,本发明采用cfosat散射计观测的风向对船载地波雷达风向测量结果进行大范围对比验证,主要是基于雷达风向数据与cfosat观测数据在空间和时间上的数据配置。首先,统一雷达和cfosat观测风向的参考方向,均以正北方向作为风向的参考方向,逆时针方向风向减小。由于雷达与cfosat观测风向数据的时间分辨率和空间分辨率不同,在时-空上几乎没有完全同步的风向数据进行比对验证,因此需要设定时间和空间匹配半径,获取同步配置的风向数据样本。雷达划分的角度分辨率为4,距离分辨率为2.5km,cfosat空间分辨率为12.5km
×
12.5km,考虑卫星在雷达探测海域的过境时间,因此设置雷达与cfosat的时空匹配半径为5min,5km。
[0116]
其次,根据同步配置的风向数据样本,绘制风向散点分布频率图和误差直方图来直观评价雷达反演风向结果的精度,同时计算统计参数平均绝对偏差、均方根误差和相关性系数来对雷达反演风向结果进行客观对比分析。
[0117]
图9为船载地波雷达测量风向(粗箭头)与cfosat观测风向(细箭头)的比较结果,风向主要由西北向东南缓慢变化。
[0118]
图10为船载地波雷达和cfosat比较风向的散点图,时空配置的风向数据样本共77个。其中,风向散点均匀分布在等值线两侧,雷达测量的风向与cfosat观测风向一致性较好。与cfosat观测风向相比,雷达测量风向的平均绝对偏差(mae)为5.7681
°
,均方根误差(rmse)为7.1008
°
,相关系数(r)为0.7758。
[0119]
图11为雷达测量风向与cfosat观测风向的误差直方图,船载地波雷达估计的风向偏差主要分布在-15
°
~15
°
。
[0120]
综合上述实测数据的结果对比分析,本发明的利用船载地波雷达进行风向测量的方法有效,可为海上大范围风向的连续观测提供技术支撑。
[0121]
本发明还可有其它多种实施例,在不违背本发明精神及其实质的情况下,本领域技术人员当可根据本发明做出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1