光学装置、车载系统、运动装置、光学装置的制造方法与流程
1.本公开涉及一种光学装置、一种车载系统、一种运动装置以及一种光学装置的制造方法。
背景技术:
2.最近已经提出了使用激光束或所谓光检测和测距(lidar)的激光雷达装置,以便测量两个汽车之间的距离(车辆间距离)。lidar能够通过将激光束(例如红外光)照射在目标区域上并且通过检测反射光而检测障碍物的存在或不存在,但是它需要调节在目标区域中的激光束形状。日本专利公开no.(“jp”)2011-47832公开了一种激光雷达,该激光雷达设有用于调节激光束形状的聚光透镜。
3.为了调节激光束形状,需要通过改变光源和透镜之间的相对位置来调节激光束的发散角和激光束在目标区域中的宽度。jp2011-47832中公开的激光雷达的构造不能高精度地调节光源和透镜之间的相对位置。
技术实现要素:
4.实施例的一个方面提供了一种光学装置、一种车载装置、一种运动装置以及一种用于制造光学装置的方法,它们均能够提供高度精确的定位。
5.根据实施例的一个方面的光学装置包括:第一基部和第二基部;光学元件,该光学元件由第一基部和第二基部中的至少一个保持;以及粘合剂,该粘合剂构造成使得第一基部和第二基部彼此粘接。第一基部还包括:第一凹陷部分,第二基部插入第一凹陷部分中;第一接触部分,该第一接触部分接触第二基部;以及槽部分,所述槽部分构造成允许至少一部分粘合剂进入其中。第二基部包括第二接触部分,该第二接触部分构造成接触第一接触部分。
6.通过下面参考附图对示例实施例的说明,将清楚本公开的其它特征。
附图说明
7.图1a至图1f解释了根据第一实施例的光学装置。
8.图2是根据第二实施例的光学装置的构造图。
9.图3是根据第二实施例的光源发生器的剖视图。
10.图4是根据第二实施例的光源发生器的分解透视图。
11.图5是根据第三实施例的车载系统的方框图。
12.图6是根据第三实施例的车辆的示意图。
13.图7是表示根据第三实施例的车载系统的操作实例的流程图。
14.图8a和图8b解释了根据比较实例的光学装置。
具体实施方式
15.下面将参考附图给出根据本公开的实施例的详细说明。
16.比较实例
17.现在将参考图8a和图8b给出根据比较实例的光学装置的说明。图8a和图8b解释了根据比较实例的光学装置700。图8a是光学装置700的分解透视图,示出了第二基部(第二基板)75怎样插入第一基部(第一基板)70中。图8b是光学装置700的剖视图,其中,第二基部75已经插入第一基部70中,且第一基部70的接触表面71沿z轴线方向接触第二基部75的接触表面76。
18.光学装置700包括第一基部70及第二基部75。第一基部70具有凹陷部分72,第二基部75能够插入该凹陷部分72中。凹陷部分72具有第一基部70的接触表面71。第二基部75的接触表面76具有降低一个台阶的粘合剂槽部分77,粘合剂槽部分77与第一基部70的接触表面71之间的空间填充有粘合剂(热固性粘合剂)78。第一基部70与第二基部75通过粘合剂78而彼此粘接。第一基部70和第二基部75中的至少一个保持光学元件。
19.在装配光学装置700的过程中,首先,将第二基部75的粘合剂槽部分77预先填充热固性粘合剂78。接下来,将第二基部75插入第一基部70中的凹陷部分72直到两个基部的接触表面76和71彼此接触,利用夹具(未示出)例如弹簧沿z轴线方向推压第二基部75,以便确定第二基部75沿z轴线方向的位置。间隙79沿图8a中的x轴线方向和y轴线方向提供于第一基部70和第二基部75之间,两个基部沿x轴线方向和y轴线方向的位置以及沿绕z轴线的旋转方向θz的相对位置是可调节的。第一基部70的接触表面71和第二基部75的接触表面76通过夹具等而被迫沿z轴线方向彼此接触。在保持沿z轴线方向的位置的同时,调节沿x轴线方向和y轴线方向中的每个的位置以及沿绕z轴线的旋转方向θz的相对位置,然后,将装配了的产品加热一定时间段,以便固化热固性粘合剂78。
20.在这种结构中,在粘合剂固化前,取决于用于调节第一基部70和第二基部75沿x轴线方向、沿y轴线方向以及绕z轴线的相对位置的调节时间和调节次数,粘合剂可以沿x轴线方向和y轴线方向流入两个基部之间的间隙79。当粘合剂沿x轴线方向和y轴线方向流入两个基部之间的间隙79时,由于粘合剂的收缩固化,在固化处理中可能发生相对于被调节位置的位置偏移。
21.第一实施例
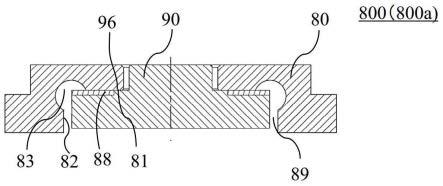
22.下面将参考图1a至图1f给出根据本公开第一实施例的光学装置800的说明。图1a至图1f解释了根据该实施例的光学装置800。图1a是光学装置800的分解透视图,示出了第二基部90怎样插入第一基部80。图1b至图1f是光学装置800的剖视图,其中,第二基部90已经插入第一基部80。图1b至图1f分别示出了根据该实施例的光学装置800的变化形式(光学装置800a至800e)。
23.根据该实施例的光学装置800包括第一基部80和第二基部90。第一基部80具有凹陷部分(第一凹陷部分、凹形部分)82,第二基部90能够插入该凹陷部分82内。凹陷部分82具有接触表面(第一接触部分)81。第二基部90的接触表面(第二接触部分)96具有凹陷部分(第二凹陷部分)91,使得接触表面96具有台阶状结构,且由第二凹陷部分91形成的空间填充有粘合剂(热固性粘合剂)88。第一基部80与第二基部90通过粘合剂88而彼此粘接。第一基部80或第二基部90中的至少一个保持光学元件。光学元件例如是透射从光源发射的光的
透镜。
24.为了避免在制造处理过程中在第一基部80和第二基部90之间的相对位置偏移,光学装置800具有逸出槽(槽部分)83,该逸出槽83从第一基部80的凹陷部分82的顶部拐角凹入,如图1b中所示。逸出槽83并不局限于从凹陷部分82的顶部拐角形成,而是也可以形成在凹陷部分82的底表面上。也就是,逸出槽83形成在凹陷部分82的侧表面和底表面中的至少一个上。例如,当凹陷部分82是半球形时,逸出槽83可以提供在构成半球形的表面上。
25.即使当第一基部80和第二基部90之间的相对位置沿x轴线方向、沿y轴线方向以及绕z轴线被调节时,逸出槽83也容纳用于位置调节的粘合剂池。逸出槽83能够防止粘合剂沿x轴线方向和y轴线方向流入第一基部80和第二基部90之间的间隙89中。因此,在粘合剂的收缩固化处理中,能够抑制相对于第一基部80和第二基部90之间的被调节位置(相对位置)的位置偏移,并能够实现高度精确的定位。
26.如上所述,根据该实施例的光学装置800(800a)包括在第一基部80的凹陷部分82的拐角处的逸出槽83。该逸出槽83的形状并不局限于图1b中所示的形状。例如,逸出槽可以具有这样的形状,例如形成于图1c的光学装置800b中的逸出槽84的形状或者形成于图1d的光学装置800c中的逸出槽85的形状,只要它能够容纳用于位置调节的粘合剂池即可。也就是,第一基部80具有:凹陷部分82,第二基部90插入该凹陷部分82中;接触表面81,该接触表面81接触第二基部90;以及逸出槽83、84或85,该逸出槽83、84或85能够容纳溢出的粘合剂88或者溢出的粘合剂88可以进入该逸出槽83、84或85。第二基部90具有与接触表面81接触的接触表面96。逸出槽83、84和85可以形成在接触表面81附近。逸出槽83、84和85可以形成在凹陷部分82的侧表面(拐角部分)上。逸出槽83、84和85可以形成在面向粘合剂槽部分91的位置处。
27.作为另一结构,如图1e中所示,能够容纳用于位置调节的粘合剂池的逸出槽93可以提供在第二基部92的外周部分的一部分或整个圆周上。作为还一构造,如图1f中所示,逸出槽95可以提供在第二基部94的接触表面96的一部分或整个圆周上,以便容纳用于位置调节的粘合剂池。也就是,第一基部80包括:凹陷部分82,第二基部92或94插入该凹陷部分82;以及接触表面81,该接触表面81接触第二基部92或94。第二基部92或94包括:接触表面96和逸出槽93或95,接触表面96接触接触表面81,逸出槽93或95用于容纳溢出的粘合剂88(或粘合剂88可以进入)。逸出槽93或95可以形成为与粘合剂槽部分91相邻。逸出槽93或95可以形成在面向粘合剂槽部分91的位置处。在本实施例中,粘合剂槽部分91可以设置在第一基部80的接触表面81上,而不是第二基部90、92或94。
28.第二实施例
29.下面将参考图2给出根据本公开第二实施例的光学装置(lider)300的说明。lidar包括:照射系统,该照射系统照射物体(目标);以及接收系统,该接收系统接收来自物体的反射光或散射光。lidar分类成同轴系统和非同轴系统,在同轴系统中,照射系统和接收系统的方向相同,在非同轴系统中,照射系统和接收系统分别设置。图2是根据该实施例的光学装置300的方框图。光学装置300是所谓的同轴系统lidar,其中,照射系统和接收系统的光轴通过穿孔反射镜4而彼此一致。
30.在图2中,光源发生器(光投影仪)50包括:半导体激光器(光源)1,该半导体激光器1发射激光束100;透镜2,该透镜2将激光束100在目标区域中的光束形状调节为所希望的形
状;以及光阑(固定光阑)3,该光阑3阻挡激光束100的不需要光。从光源发生器50发射的激光束100通过光阑3的开口3a投射。然后,激光束100穿过在由基部筒51固定和保持的穿孔反射镜4中的孔4a,并通过由基部筒51固定和保持的固定反射镜5来反射。然后,激光束100通过可运动反射镜6(例如mems(微机电系统)反射镜)而照射在目标区域(物体,例如障碍物60)上。
31.由基部筒51固定和保持的可运动反射镜6是在绕图2中的y轴线或绕与y轴线正交的x轴线旋转的双轴驱动反射镜。也就是,可运动反射镜6用作偏转器,它使得来自半导体激光器1的激光束100偏转以便扫描物体,并使得来自物体的反射光101偏转。照射在目标区域上的激光束100作为来自障碍物60的反射光101而返回至可运动反射镜6。由可运动反射镜6反射的反射光101通过由基部筒51固定和保持的固定反射镜5来反射,通过穿孔反射镜4的反射表面4b来反射,并被引导至由基部筒51固定和保持的聚光透镜7。从聚光透镜7发射的反射光101被引导至光接收元件8。因此,穿孔反射镜4用作光引导单元,它将激光束100从半导体激光器1引导至可运动反射镜6,并将来自可运动反射镜6的反射光101引导至光接收元件8。
32.控制器102控制半导体激光器1、可运动反射镜6和光接收元件8。控制器102分别以预定的驱动电压和驱动频率来驱动半导体激光器1和可运动反射镜6,并在特定频率下测量由光接收元件8接收的接收光中的接收波形。控制器102测量由光接收元件8获得的光接收时间与半导体激光器1的光发射时间之间的差别,或者由光接收元件8获得的光接收信号的相位与来自半导体激光器1的输出信号的相位之间的差别。控制器102通过将所述差别乘以光速而确定到物体的距离。因此,控制器102基于光接收元件8的输出而获得物体的距离信息。
33.下面将参考图3和图4给出光源发生器50的结构的说明。图3是光源发生器50的剖视图。图4是光源发生器50的分解透视图。
34.在图3和图4中,透镜保持器(保持部件)11保持透镜2和光阑3,该光阑3阻挡激光束100的不需要的光。透镜2由透镜保持器11用粘合剂12来固定和保持。半导体激光器1是其中堆叠多个发光区域的光源。从半导体激光器1发射的激光束100沿发射区域的直径较小的方向发射为多个光束。激光束100在目标区域中的光束形状显著影响lidar性能,半导体激光器1和透镜2之间的位置关系需要以几μm(微米)的精度来调节。
35.假设z轴线方向设定为半导体激光器1和透镜2之间的间隔方向,且x轴线方向和y轴线方向设定为在与z轴线方向正交的平面上的平行运动方向。半导体激光器1通过粘合剂而固定和保持在保持半导体激光器1的激光二极管(ld)保持器(光源保持部件)10上。当螺纹部分13a与透镜保持器11的螺纹部分11b螺纹连接时,调节环(螺纹部件)13沿z轴线方向被保持,且偏压弹簧(弹性部件)14的偏压力消除了螺纹部分13a沿z轴线方向的反冲。当直径接合部分13b与透镜保持器11的直径接合部分11c接合时,确定了调节环13和透镜2沿与z轴线方向正交的方向的位置。在该实施例中,图1a至1f中的第一基部对应于保持半导体激光器1的ld保持器10,第二基部是与透镜保持器11螺纹连接和接合的调节环。
36.沿z轴线方向在半导体激光器1和透镜2之间的距离通过使调节环13绕z轴线旋转来调节。这时,平面(平表面)部分10a(该平面部分10a形成与ld保持器10的z轴线正交的平面(平表面))由偏压弹簧14稳定地偏压在平面(平表面)部分13c(该平面部分13c形成与调
节环13的z轴线正交的平面)上。与调节环13的z轴线正交的平面部分13c位于调节环13的凹陷部分13f中。当平面部分13c接触平面部分10a(该平面部分10a形成与已经插入到凹陷部分13f的ld保持器10的z轴线正交的平面)时,包括光源发生器50和光学装置300的结构整体更小。通过调节沿z轴线方向的位置,从半导体激光器1发射的激光束100在目标区域中的光束形状可以调节为所希望的形状。在位置被调节之后,粘合剂16施加(提供)至透镜保持器11的粘合剂槽部分11d,并且在由偏压弹簧14偏压的同时固化,从而能够固定调节环13和透镜保持器11之间沿z轴线方向的距离。
37.接下来,通过使ld保持器10相对于透镜保持器11运动来调节半导体激光器1和透镜2沿与z轴线方向正交的x轴线方向和y轴线方向的位置以及半导体激光器1和透镜2围绕z轴线的角度位置。ld保持器10的平面部分10a通过偏压弹簧14而无游隙地偏压在调节环13的平面部分13c上,能够在保持ld保持器10沿z轴线方向的位置的同时调节它沿x轴线方向和y轴线方向的位置以及它绕z轴线的角度位置。能够通过调节沿x轴线方向和y轴线方向的位置以及绕z轴线的角度位置将从半导体激光器1发射的激光束100在目标区域中的光束调节至合适位置。
38.ld保持器10的平面部分10a包括降低一个台阶的平面部分(凹形表面)10b,热固性粘合剂15填充在平面部分10b和调节环13的平面部分13c之间的空间中。逸出槽13d提供在调节环13的凹陷部分13f的拐角处。因此,当调节沿x轴线方向和y轴线方向的位置以及绕z轴线的角度时,可以防止从平面部分10b溢出的热固性粘合剂15流入ld保持器10和调节环13之间的间隙13e中。相反,可以设想调节要施加的粘合剂量,以便在调节沿x轴线方向和y轴线方向的位置以及绕z轴线的角度时防止热固性粘合剂15从平面部分10b溢出。不过,为了防止热固性粘合剂15从平面部分10b溢出,需要优化粘合剂施加量,同时对于各个部件检查由于个体差异而引起的平面部分10b的容积变化,因此生产率可能降低。
39.在确定ld保持器10沿x轴线方向和y轴线方向的位置以及绕z轴线的角度之后,热固性粘合剂15通过加热而固化。通过将ld保持器10固定在调节环13上,将固定和保持半导体激光器1和透镜2之间的位置关系。这时,ld保持器10和调节环13之间沿z轴线方向的位置关系由平面部分10a和13c之间的接触来确定,不受热固性粘合剂15的收缩固化的影响。由于偏压弹簧14的偏压力和热固性粘合剂15的收缩固化,在ld保持器10的平面部分10a和调节环13的平面部分13c之间产生摩擦力。因此,沿x轴线方向、y轴线方向和绕z轴线的位置可以没有任何偏移地固定。
40.相对于基部筒51沿x轴线方向和y轴线方向调节其中半导体激光器1和透镜2之间的位置关系已经被调节和固定的光源发生器50的位置,使得它容纳在附接于基部筒51的可运动反射镜6的目标区域中,然后被粘接和固定。光源发生器50和基部筒51之间的位置关系可以有几十微米的调节精度。
41.因此,该实施例能够高精度地调节半导体激光器1和透镜2之间沿x轴线方向、y轴线方向和z轴线方向以及绕z轴线的位置关系。也就是,沿z轴线方向的位置通过调节环13来调节(该调节环13通过螺纹结构而与透镜保持器11螺纹连接),沿x轴线方向、y轴线方向的位置和绕z轴线的角度位置通过调节环13的平面部分13c和ld保持器10的平面部分10a之间的接触平面上的运动来调节。即使当粘合剂用于固定和保持时,不受粘合剂的收缩固化影响的结构也能够保持高度精确的相对位置关系。
42.该实施例使用同轴lidar作为实例,但是本公开并不局限于该实施例。各实施例也可适用于非同轴lidar和光学装置(例如除lidar之外的激光照射装置)。
43.第三实施例
44.下面将参考图5至图7给出根据本公开的第三实施例的车载系统(驾驶支持装置)1000的说明。车载系统1000包括根据第二实施例的光学装置(lidar)300。
45.图5是车载系统1000的方框图。车载系统1000具有由例如汽车(车辆)的(可动)运动单元(运动装置)保持的系统,并构造成基于由光学装置300获得的物体(例如车辆周围的障碍物或行人)的距离信息来支持车辆的驾驶(转向)。图6是作为包括车载系统1000的运动装置的车辆500的示意图。在图6中,光学装置300的距离测量范围(检测范围)设定在车辆500的前方,但是距离测量范围也可以设定在车辆500的后方或侧面。
46.如图5中所示,车载系统1000包括光学装置300、车辆信息获得装置200、控制装置(ecu:下文中的电子控制单元)350和警告装置(警告单元)400。光学装置300包括用作距离获得单元(获得单元)和碰撞确定单元(确定单元)的控制器102(见图2)。当需要时,车载系统1000可以包括与控制器102分离的距离获得单元和碰撞确定单元,且各单元可以提供在光学装置300的外部(例如,车辆500内部)。也可选择地,控制装置350可以包括控制器102的至少一部分功能。
47.图7是表示车载系统1000的操作实例的流程图。下面将参考该流程图给出车载系统1000的操作的说明。
48.首先,在步骤s1中,光学装置300的光源发生器(光源单元)50照射车辆周围的物体,控制器102通过接收来自物体的反射光、基于从光接收元件8输出的信号而获得物体的距离信息。在步骤s2中,车辆信息获得装置200获得车辆信息,包括车辆的车辆速度、偏航率、转向角等。接下来,在步骤s3中,控制器102使用在步骤s1中获得的距离信息和在步骤s2中获得的车辆信息来确定到物体的距离是否包括在预设距离范围内。
49.该构造能够确定物体是否存在于车辆周围的设定距离内,还确定车辆和物体之间碰撞的可能性。步骤s1和s2可以以相反顺序或并行地执行。当物体存在于设定距离内时,控制器102确定“存在碰撞的可能性”(步骤s4),而当物体不存在于设定距离内时,控制器102确定“不存在碰撞的可能性”(步骤s5)。
50.接下来,当控制器102确定“存在碰撞的可能性”时,控制器102将确定结果通知(发送至)控制装置350和警告装置400。这时,控制装置350基于控制器102的确定结果来控制车辆(步骤s6),警告装置400基于控制器102的确定结果来警告车辆用户(驾驶员、乘客)(步骤s7)。确定结果可以通知给控制装置350和警告装置400中的至少一个。
51.控制装置350能够通过向车辆的驱动单元(发动机、马达等)输出控制信号来控制车辆的运动。例如,车辆提供这样的控制,例如施加制动、释放油门踏板、转动方向盘、产生用于在各车轮上产生制动力的控制信号以及抑制发动机或马达的输出。警告装置400警告用户,例如通过发出警报声音、在汽车导航系统的屏幕上显示警告信息或振动安全带或方向盘。
52.因此,车载系统1000能够使用上述处理来检测物体和测量距离,并能够避免车辆和物体之间的任何碰撞。特别是,将光学装置300应用于车载系统1000能够实现较高的距离测量精度,从而能够高精度地执行物体检测和碰撞确定。
53.该实施例将车载系统1000应用于驾驶支持(碰撞损坏减少),但是本公开并不局限于该实施例。车载系统1000可以应用于自适应巡航控制和自动驾驶。车载系统1000不仅能够应用于车辆例如汽车,还能够应用于运动体,例如船、飞机或工业机器人。车载系统1000还能够应用于利用物体识别的各种装置,例如智能运输系统(its)和监视系统以及运动体。
54.车载系统1000和车辆500可包括通知装置(通知单元),该通知装置(通知单元)向车载系统1000的制造商和车辆500的销售商(经销商)通知车辆500和障碍物之间的任何碰撞。例如,通知装置可以通过电子邮件等将关于车辆500和障碍物之间的碰撞的信息(碰撞信息)发送至预设的外部通知目的地。
55.因此,采用由通知装置自动通知碰撞信息的构造能够在碰撞之后迅速采取措施,例如检查和修复。碰撞信息的通知目的地可以是保险公司、医疗机构、警察或由用户设定的任何其它装置。通知装置不仅可以向通知目的地通知碰撞信息,还可以通知各部件的故障信息和消耗品的消耗信息。碰撞的存在或不存在可以通过使用基于来自上述光接收元件8的输出而获得的距离信息或者通过另一检测器(传感器)来检测。
56.各实施例在第一基部的凹陷部分的拐角处提供逸出槽,并能够在调节第一基部和第二基部的相对位置时防止从粘合剂槽部分溢出的粘合剂流入沿x轴线方向和y轴线方向在第一基部和第二基部之间的调节间隙中。因此,在粘合剂的收缩固化处理中,能够抑制相对于已经高精度调节的两个基部的位置的位置偏移,各实施例能够高精度地提供相对定位。因此,各实施例能够提供一种光学装置、一种车载装置、一种运动装置以及一种用于制造光学装置的方法,它们均能提供高精度定位。
57.尽管已经参考示例实施例介绍了本公开,但是应当理解,本公开并不局限于所公开的示例实施例。随后的权利要求的范围应当根据最广义的解释,以便覆盖所有这些变化形式以及等效结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1