用于激光雷达的点云数据处理方法以及激光雷达系统与流程
本发明涉及光电探测领域,尤其涉及用于激光雷达的点云数据处理方法、计算机存储介质以及激光雷达系统。
背景技术:
1、激光雷达是一种常用的测距传感器,具有探测距离远、分辨率高、抗有源干扰能力强、体积小、质量轻等优点,广泛应用于智能机器人、无人机、无人驾驶等领域。
2、随着激光雷达工艺及方案的进步,雷达的性能越来越高,线数也越来越高,例如最早的4线、8线激光雷达,发展到32线、40线、64线甚至128线,计算机软件每秒所需要处理的点的数量也越来越多,例如128线激光雷达点频超过3百万。
3、激光雷达点云文件是用于存储网络封包的原始文件,记录详细的点云数据,激光雷达的线数越高,需要存储的点云数据就越多,占用的存储空间也越大,对于点云的存储、传输及分享带来极大的不便。
4、背景技术部分的内容仅仅是公开发明人所知晓的技术,并不当然代表本领域的现有技术。
技术实现思路
1、有鉴于现有的一个或多个缺陷,本发明涉及一种用于激光雷达的点云数据处理方法,所述点云数据处理方法包括:
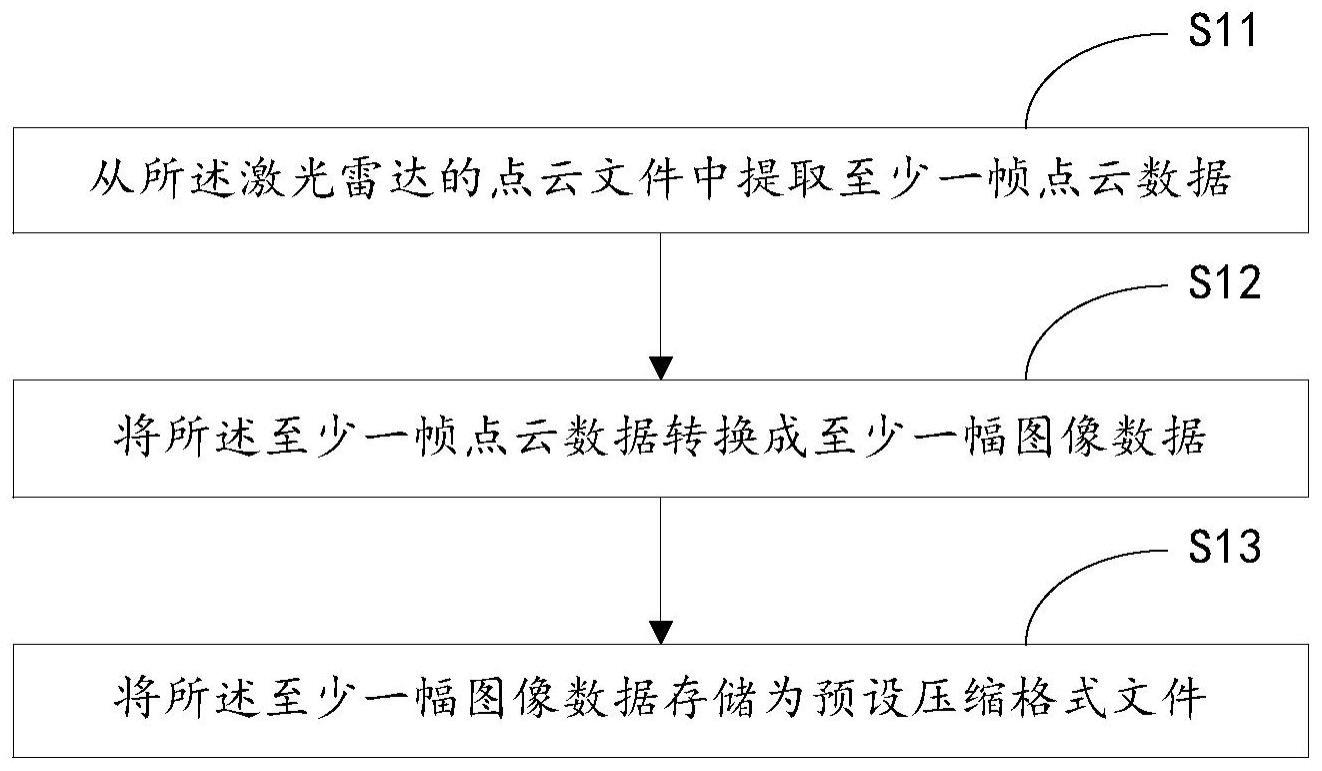
2、s11:从所述激光雷达的点云文件中提取至少一帧点云数据;
3、s12:将所述至少一帧点云数据转换成至少一幅图像数据;
4、s13:将所述至少一幅图像数据存储为预设压缩格式文件。
5、根据本发明的一个方面,其中一帧点云数据对应于一幅图像数据,所述步骤s12还包括:根据一帧点云数据需占用的存储空间,设置转换后的一幅图像数据的尺寸。
6、根据本发明的一个方面,其中一帧点云数据是指激光雷达遍历一次视场范围获得的点云数据,其包括在多个基准角度下的多个数据点的数据。
7、根据本发明的一个方面,其中所述点云数据中一个数据点的存储空间的大小对应于所述图像数据中一个像素的存储空间的大小,所述步骤s12还包括:根据预设的数据点和像素的位置对应关系,将所述点云数据中一个数据点的数据对应地填充到所述图像数据的一个像素中。
8、根据本发明的一个方面,其中所述一个数据点的数据包括激光雷达一次探测获得的物体的距离以及反射率。
9、根据本发明的一个方面,其中所述步骤s13还包括:将一幅图像数据存储为压缩图片格式。
10、根据本发明的一个方面,其中所述步骤s13还包括:将多幅图像数据存储为压缩视频格式。
11、根据本发明的一个方面,所述点云数据处理方法还包括:
12、s14:将所述预设压缩格式文件解码为至少一幅图像数据;
13、s15:对所述至少一幅图像数据中的每个像素进行数据处理,获得与所述至少一帧点云数据对应的三维坐标数据;
14、s16:至少根据所述三维坐标数据生成三维点云并显示。
15、根据本发明的一个方面,其中所述步骤s15还包括:根据所述激光雷达的校准数据对所述图像数据中的对应像素进行数据处理。
16、根据本发明的一个方面,其中所述激光雷达的校准数据包括每个数据点的水平角度校正参数和垂直角度校正参数。
17、根据本发明的一个方面,其中根据所述水平角度校正参数和基准角度获得所述点云数据的水平角度,根据所述垂直角度校正参数获得所述点云数据的垂直角度。
18、根据本发明的一个方面,其中所述步骤s15中对所述图像数据中的每个像素进行数据处理的过程包括:
19、s151:提取每个像素对应的距离和反射率;
20、s152:根据预设的数据点和像素的位置对应关系,获得每个像素对应的数据点的距离、水平角度和垂直角度;
21、s153:计算每个像素对应的数据点的三维坐标数据。
22、根据本发明的一个方面,其中所述步骤s16包括:根据每个像素对应的数据点的三维坐标数据和反射率生成三维点云并显示。
23、本发明还涉及一种计算机存储介质,包括存储于其上的计算机可执行指令,所述可执行指令在被处理器执行时实施如上所述的点云数据处理方法。
24、本发明还涉及一种激光雷达系统,包括:
25、激光雷达,所述激光雷达包括:
26、发射装置,配置为发射探测光束;
27、探测装置,配置为接收所述探测光束经物体反射的回波;和
28、点云生成装置,配置为与所述发射装置和所述探测装置耦接,并配置成根据所述回波生成点云文件;
29、所述激光雷达系统还包括:
30、数据处理装置,配置为与所述激光雷达的点云生成装置通讯,以获取所述点云文件,并配置为执行如上所述的点云数据处理方法。
31、本发明通过点云数据的格式转换和压缩,减小了存储空间,提高了传输效率,并且解决了传统方式只能显示但不能在线播放点云的问题,提高了分享效率。
技术特征:
1.一种用于激光雷达的点云数据处理方法,所述点云数据处理方法包括:
2.根据权利要求1所述的点云数据处理方法,其中一帧点云数据对应于一幅图像数据,所述步骤s12还包括:根据一帧点云数据需占用的存储空间,设置转换后的一幅图像数据的尺寸。
3.根据权利要求2所述的点云数据处理方法,其中一帧点云数据是指激光雷达遍历一次视场范围获得的点云数据,其包括在多个基准角度下的多个数据点的数据。
4.根据权利要求1所述的点云数据处理方法,其中所述点云数据中一个数据点的存储空间的大小对应于所述图像数据中一个像素的存储空间的大小,所述步骤s12还包括:根据预设的数据点和像素的位置对应关系,将所述点云数据中一个数据点的数据对应地填充到所述图像数据的一个像素中。
5.根据权利要求4所述的点云数据处理方法,其中所述一个数据点的数据包括激光雷达一次探测获得的物体的距离以及反射率。
6.根据权利要求1-5中任一项所述的点云数据处理方法,其中所述步骤s13还包括:将一幅图像数据存储为压缩图片格式。
7.根据权利要求1-5中任一项所述的点云数据处理方法,其中所述步骤s13还包括:将多幅图像数据存储为压缩视频格式。
8.根据权利要求1-5中任一项所述的点云数据处理方法,还包括:
9.根据权利要求8所述的点云数据处理方法,其中所述步骤s15还包括:根据所述激光雷达的校准数据对所述图像数据中的对应像素进行数据处理。
10.根据权利要求9所述的点云数据处理方法,其中所述激光雷达的校准数据包括每个数据点的水平角度校正参数和垂直角度校正参数。
11.根据权利要求10所述的点云数据处理方法,其中根据所述水平角度校正参数和基准角度获得所述点云数据的水平角度,根据所述垂直角度校正参数获得所述点云数据的垂直角度。
12.根据权利要求8所述的点云数据处理方法,其中所述步骤s15中对所述图像数据中的每个像素进行数据处理的过程包括:
13.根据权利要求12所述的点云数据处理方法,其中所述步骤s16包括:根据每个像素对应的数据点的三维坐标数据和反射率生成三维点云并显示。
14.一种计算机存储介质,包括存储于其上的计算机可执行指令,所述可执行指令在被处理器执行时实施如权利要求1-13中任一项所述的点云数据处理方法。
15.一种激光雷达系统,包括:
技术总结
本发明提供一种用于激光雷达的点云数据处理方法、计算机存储介质以及激光雷达系统,其中所述点云数据处理方法包括:S11:从所述激光雷达的点云文件中提取至少一帧点云数据;S12:将所述至少一帧点云数据转换成至少一幅图像数据;S13:将所述至少一幅图像数据存储为预设压缩格式文件。本发明通过点云数据的格式转换和压缩,减小了存储空间,提高了传输效率,并且解决了传统方式只能显示但不能在线播放点云的问题,提高了分享效率。
技术研发人员:陶华为,向少卿
受保护的技术使用者:上海禾赛科技有限公司
技术研发日:
技术公布日:2024/1/15
-
 0188110... 来自[中国] 2023年12月11日 17:16该专利很好,很符合我目前的需求!
0188110... 来自[中国] 2023年12月11日 17:16该专利很好,很符合我目前的需求!