一种适合于飞行器近场成像诊断的快速频域成像方法
1.本发明涉及飞行器近场成像技术领域,具体是一种适合于飞行器近场成像诊断的快速频域成像方法。
背景技术:
2.飞行器的隐身性能,已经成为先进飞机的重要指标,在隐身飞行器的设计过程中,基于数字模型的雷达散射截面(radar cross section,rcs)仿真计算、飞行器缩比样机暗室测量、室外全尺寸实物静态及飞行测试构成现有的隐身性能优化常用流程,这方面已经形成了成熟的软件和相关标准。
3.对于无人机而言,它没有飞行员、座舱、生命维持系统等限制,因而机身结构的设计更为灵活,具有更大的隐身性能优化空间,已经成为飞行器隐身技术快速发展的重要促进因素。伴随着复合材料的快速发展、无人飞行器结构更加精巧,通过缩比模型测试会引入较大的测量偏差,而外场实物测试存在成本高昂、保密性差,精度受限,易受天气影响等不利特点。综合来看,这些因素不利于无人飞行器保持成本低廉、研发周期短等优势。
4.因此,在室内或者室外的较小区域内开展近场测量,成为无人飞行器隐身测量的重要趋势。在近场测量中,又可以结合需求,开展一维和二维甚至三维成像分析,可用于定位和量化评估电磁散射特性;进一步地,通过对飞行器目标主要散射点的诊断和分析,为改进飞行器外形、结构及材料设计,降低全机或部件的rcs电平,可提供具体的量化的指导。
5.目标的成像方面,转台成像模式发展历史悠久,相似的成像机理广泛应用至医用x射线层析成像。在成像算法实现方面,可以归纳为时域处理和频域处理两大类,时域处理对成像几何适应性强,缺点是计算量大,转台成像中的时域处理算法主要是卷积逆投影算法以及其他投影类算法。频域成像算法主要包括距离-多普勒算法(range doppler algorithm,rda)和极坐标格式算法(polar format algorithm,pfa)。
6.rda适用于远场条件下的小转角成像,在观测时间内散射点的走动不超过一个分辨单元的情况下,所获得的频率域目标信号的极坐标数据可近似被认为是直角坐标网格上的数据,对距离和方位向的数据分别进行傅里叶变换即可得到目标的雷达图像。pfa对rda算法成像性能进行了拓展,不在将小角度的极坐标数据近似为直角坐标上的数据,而是通过极坐标采样将数据插值到具有均匀栅格的直角坐标系中,再利用二维傅里叶变换得到目标图像,但pfa的应用前提是仍然需要满足远场条件。
7.尽管相比于合成孔径雷达(sar),转台成像区域小,对计算实时性的需求没有机载或者星载sar实时成像迫切,但在保证成像精度的情况下提高运算速度依然具有重要意义,有利于加快飞行器总体设计与优化进程。
技术实现要素:
8.针对上述现有技术中的不足,本发明提供一种适合于飞行器近场成像诊断的快速频域成像方法,能够得到了聚焦良好、定位准确的近场成像结果。
9.为实现上述目的,本发明提供一种适合于飞行器近场成像诊断的快速频域成像方法,包括如下步骤:
10.采集飞行器的近场回波信号,并将其进行径向匹配滤波以及沿雷达转角θ维傅里叶变换,得到二维频域信号s(k,ξ),其中,k表示距离向波数,ξ表示方位向波数,且ξ与θ互为傅里叶变换对;
11.基于补偿函数h
inv
(k,ξ)对二维频域信号s(k,ξ)进行空不变匹配滤波,并对ξ进行逆傅里叶变换,得到距离波数角度时域信号s(k,θ);
12.对距离波数角度时域信号s(k,θ)进行子孔径划分,得到子孔径数据θi,i∈[1,n]对应不同的雷达转角区间,n表示子孔径总数量,其中,在子孔径划分的过程中,将斜距平面频谱近似为水平面频谱;
[0013]
对子孔径数据进行极坐标插值,并在插值后进行二维逆傅立叶变换则得到子孔径图像,即得到不同转角区间对应的飞行器近场成像结果。
[0014]
在其中一个实施例,所述补偿函数h
inv
(k,ξ)具体为:
[0015][0016]
式中,j表示虚数单位,r表示雷达运动半径。
[0017]
在其中一个实施例,所述基于补偿函数h
inv
(k,ξ)对二维频域信号s(k,ξ)进行空不变匹配滤波,并对ξ进行逆傅里叶变换,得到距离波数角度时域信号s(k,θ)。所述距离波数角度时域信号s(k,θ)经过近似为水平面频谱后,可以表示为:
[0018][0019]
式中θz表示雷达天线相位中心对应转台中心的下视角,r表示某散射点的半径,表示该散射点对应的角度,是散射点在极坐标下的展示。
[0020]
在其中一个实施例,所述将斜距平面频谱近似为水平面频谱进行处理,通过控制子孔径宽度来约束频谱近似引入的误差,具体为:
[0021]
在子孔径宽度内斜距平面频谱与水平面频谱的相位误差相对变化量小于π/4。
[0022]
本发明提供的一种适合于飞行器近场成像诊断的快速频域成像方法,在典型的近场成像几何下,分析了忽略斜平面频谱向水平面频谱的投影带来的相位误差影响的近似条件,提出了基于子孔径处理的基本成像流程,得到了聚焦良好、定位准确的近场成像结果。
附图说明
[0023]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
[0024]
图1为本发明实施例中转台成像结构示意图;
[0025]
图2为本发明实施例中近场转台成像几何示意图;
[0026]
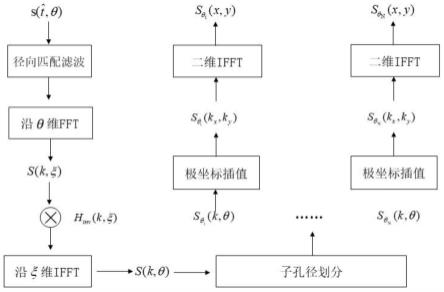
图3为本发明实施例中快速频域成像方法的流程图;
[0027]
图4为本发明实施例示例中子孔径划分的示意图;
[0028]
图5为本发明实施例示例中针对不同频段可采用的子孔径频段宽度示意图;
[0029]
图6为本发明实施例示例中在模式1下本实施例方法与传统pfa方法的成像效果对比图,其中,(a)为本实施例方法的成像效果图,(b)为传统pfa方法的成像效果图;
[0030]
图7为本发明实施例示例中在模式2下本实施例方法与传统pfa方法的成像效果对比图,其中,(a)为本实施例方法的成像效果图,(b)为传统pfa方法的成像效果图;
[0031]
图8为本发明实施例示例中在模式3下本实施例方法与传统pfa方法的成像效果对比图,其中,(a)为本实施例方法的成像效果图,(b)为传统pfa方法的成像效果图;
[0032]
图9为本发明实施例示例中在模式4下本实施例方法与传统pfa方法的成像效果对比图,其中,(a)为本实施例方法的成像效果图,(b)为传统pfa方法的成像效果图。
[0033]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0034]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0035]
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0036]
另外,在本发明中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0037]
在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接,还可以是物理连接或无线通信连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0038]
另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
[0039]
本实施例公开了一种适合于飞行器近场成像诊断的快速频域成像方法,该方法在典型的近场成像几何下,分析了忽略斜平面频谱向水平面频谱的投影带来的相位误差影响的近似条件,提出了基于子孔径处理的基本成像流程,得到了聚焦良好、定位准确的近场成像结果。
[0040]
参考图1为转台成像结构示意图,在转台成像中目标放置于转台之上,雷达收发机及天线固定,雷达天线相位中心对应转台中心的下视角为θz。
[0041]
参考图2为近场转台成像几何示意图,根据雷达运动-目标不动与雷达不动-目标运动的等效性。图2中h代表雷达天线相位中心(antenna phase center,apc)相对于转台的
高度,r代表雷达apc与转台中心地面距离,等效为apc运动半径,ra代表转台上放置目标的最大半径。设雷达apc相对转台中心的旋转角为θ,相对于转台中心o,雷达apc的三维极坐标为(r,θ,h),可以定义xr=rcosθ,yr=rsinθ,等同于笛卡尔坐标为(xr,yr,h)。不失一般性,设定转台上某散射点p坐标为可以等价表示为(x,y,0),其中基于图2所示成像几何,可以得到目标p对应的雷达回波可以表示为:
[0042][0043]
式中,k=2π(fc+f)/c表示距离向波数,f为距离向频率,fc为中心载频,c为光速,j为虚数单位。需要注意的是,上式考虑了近场成像的相位影响,但没有考虑近场测量中天线锥削效应的影响,一般地,天线锥削效应可以通过定标体进行幅相校正,其实施方式为所属领域的常规手段,因此本实施例中不再对其赘述。
[0044]
参考图3,为本实施例中快速频域成像方法的流程图,其具体包括如下步骤:
[0045]
首先,对于数据采集得到转台模式中飞行器的近场回波矩阵将回波矩阵经过径向匹配滤波得到回波信号s1(k,θ),再将回波信号s1(k,θ)沿雷达转角θ维傅里叶变换(fast fourier transform,fft),得到二维频域信号s(k,ξ),其中,ξ表示方位向波数,且ξ与θ互为傅里叶变换对。
[0046]
其次,基于补偿函数h
inv
(k,ξ)对二维频域信号s(k,ξ)进行空不变匹配滤波,补偿函数h
inv
(k,ξ)具体为:
[0047][0048]
式中r表示雷达运动半径。该补偿函数是非空变的,利于快速实现。随后对ξ进行逆傅里叶变换,得到距离波数角度时域信号s(k,θ),经过近似为水平面频谱后,可以表示为:
[0049][0050]
式中,r表示某散射点的半径,表示该散射点对应的角度,是散射点在极坐标下的展示。
[0051]
然后,对距离波数角度时域信号s(k,θ)进行子孔径划分,得到子孔径数据θi,i∈[1,n]对应不同的雷达转角区间,n表示子孔径的总数量。本实施例中,对距离波数角度时域信号s(k,θ)进行子孔径划分的具有实施过程如图4所示,图4中θ
sub1
、θ
sub2
、θ
sub3
分别对应不同的子孔径角度,进而对应不同的子孔径数据。
[0052]
其中,在子孔径划分的过程中,将斜距平面频谱s(k,ξ)近似为水平面频谱sg(k,ξ)。该近似处理成立的前提是在子孔径宽度内,s(k,ξ)与sg(k,ξ)之前的相位误差相对变化量|ω|≤π/4。
[0053]
在具体实施过程中,斜距平面频谱的表达式为:
[0054][0055]
式中,a2=r2+r2+h2,b=rr;
[0056]
水平面频谱表示形式:
[0057][0058]
式中,a
02
=r2+r2;
[0059]
斜距平面频谱s(k,ξ)与水平面频谱sg(k,ξ)之间的相位差定义为ω,频谱近似处理的前提是|ω|≤π/4。
[0060]
再然后,对子孔径数据s
θi
(k,θ)进行极坐标插值,为:
[0061]kx
=-2k cosθ
z cosθ
[0062]ky
=-2k cosθ
z sinθ
[0063]
得到(k
x
,ky)域子孔径频域信号
[0064]
最后,将(k
x
,ky)域子孔径频域信号信号进行二维逆傅立叶变换(inverse fast fourier transform,ifft)则得到子孔径图像,通过对序列子孔径图像的后续处理即得到不同转角区间对应的飞行器近场成像结果。其中,常用的后续处理为非相干积累。
[0065]
下面结合具体的示例对本实施例中的快速频域成像方法做出进一步说明。
[0066]
设定如表1所示的典型的近场成像几何与成像参数,为:
[0067]
表1 成像几何设置
[0068][0069]
以表1所述典型近场成像几何为基础,在0.6ghz~35ghz的频率范围内,以相位相对变化值不超过π/4为约束,可以得到不同频段条件下适合的子孔径宽度选定范围,如图5所示。图5横坐标为允许采用的子孔径宽度,单位为度;纵坐标对应不同的雷达中心频率,图5中浅色区域代表子孔径宽度的可行域。直观地,当雷达中心频率低时,所允许的子孔径宽度更大,当雷达中心频率增高,对应的子孔径宽度也在缩减。同时值得提醒的是,图5所示子孔径宽度是在表1所示成像几何下确定的,当目标尺寸减小(即ra减小时),不同频率对应的适用的子孔径宽度均为增大。
[0070]
结合图5所示子孔径设置建议,设定如表2所示的不同频段下的成像参数,为:
[0071]
表2 不同的成像参数设置
[0072][0073]
鉴于人们习惯于径向与横向处于正交状态下评估成像质量,因此表2中4类模式的转角区间均以90度为中心。以传统pfa方法为参考来对比成像效果。仿真运算平台为matlab2020b。
[0074]
图6-9为模式1-4下本实施例方法与传统pfa方法的成型效果对比示意图,从图6-9可知,随着观测半径的增大,传统pfa方法成像质量下降,并存在明显的位置偏移,这同pfa需满足远场条件的前提是吻合的,而本实施例提出的方法则可以得到聚焦良好且定位准确的成像结果,证实了该方法的精确性与可行性。
[0075]
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1