一种基于时变参数的捷联罗经对准方法及系统与流程
本发明涉及导航系统,特别是涉及一种基于时变参数的捷联罗经对准方法及系统。
背景技术:
1、惯导系统在进入导航工作之前需要建立初始对准,初始对准过程的准确性和效率会直接影响到惯导系统的整体性能。在实际应用过程中,绝大部分情况下都要求惯导系统快速准确的完成初始对准。基于罗经效应的罗经对准方法被广泛的应用于完成惯导系统的初始对准过程。
2、但是,目前的惯导罗经初始对准都是应用到方位小失准角情况下,即粗对准结束后,初始方位失准角在3°以下。否则,系统模型会变成非线性,采用传统的惯导罗经对准方法将达不到快速准确的对准要求。惯导系统的粗对准需要利用陀螺测量到的地球自转角速度以及加速度计测量到的地球引力。但是在某些情况下,比如船体处于摇摆情况时,船体的测量数据可能会受到干扰角速度和线性运动的影响。这些干扰量和惯性测量设备的随机误差一样,会导致粗对准结果无法达到预期要求,从而形成方位大失准角情况。
技术实现思路
1、本发明的目的是提供一种基于时变参数的惯导系统罗经对准方法及系统,可以在不同对准时刻选择不同对准参数,从而实现更精确的罗经对准。
2、为实现上述目的,本发明提供了如下方案:
3、一种基于时变参数的捷联罗经对准方法,包括:
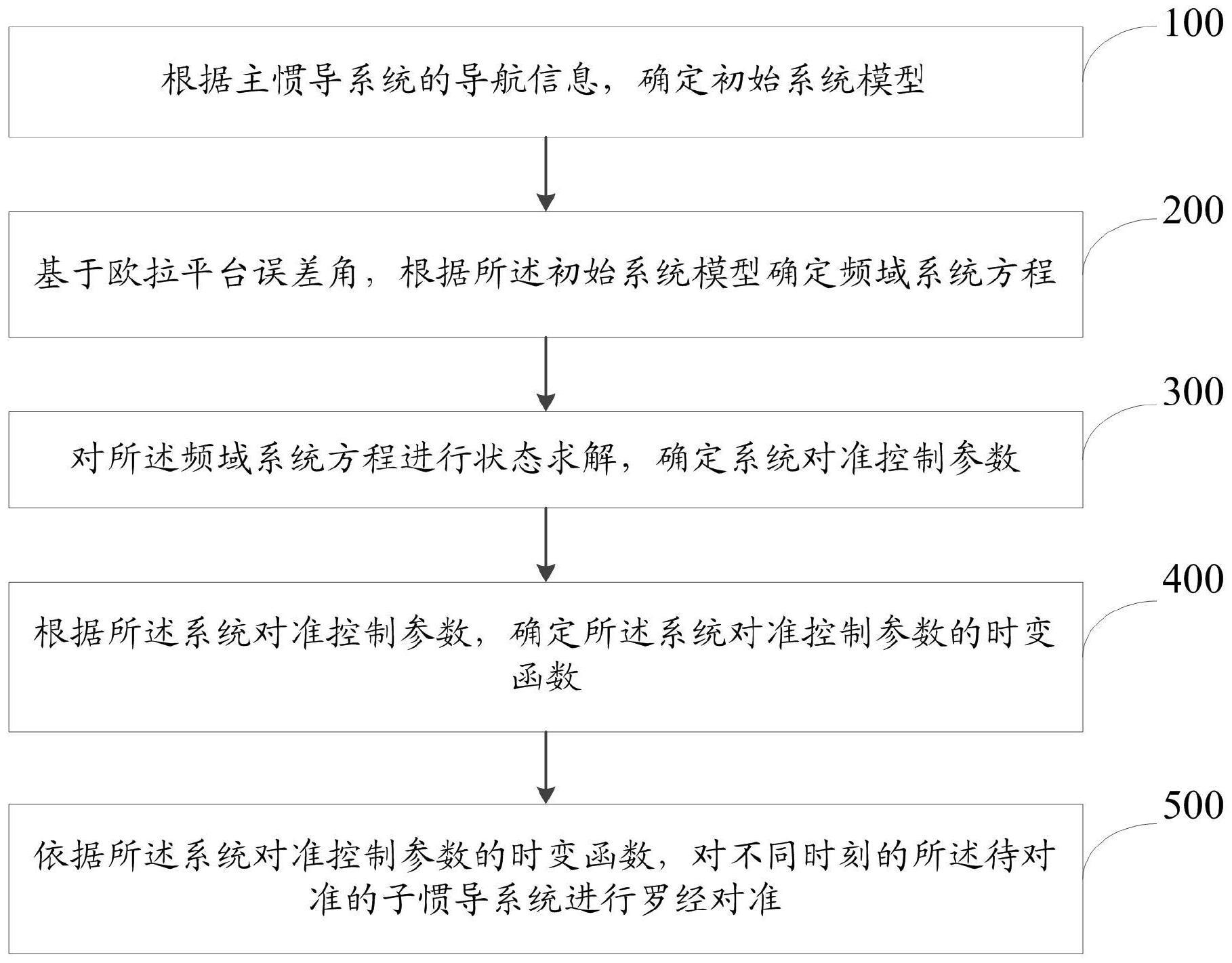
4、根据主惯导系统的导航信息,确定初始系统模型;所述初始系统模型为待对准的子惯导系统的系统模型;
5、基于欧拉平台误差角,根据所述初始系统模型确定频域系统方程;所述频域系统方程为待对准的子惯导系统在静基座条件下的频域方程;
6、对所述频域系统方程进行状态求解,确定系统对准控制参数;
7、根据所述系统对准控制参数,确定所述系统对准控制参数的时变函数;
8、依据所述系统对准控制参数的时变函数,对不同时刻的所述待对准的子惯导系统进行罗经对准。
9、可选地,所述根据主惯导系统的导航信息,确定初始系统模型,具体包括:
10、将主惯导系统采集到的初始速度和初始位置输入至待对准的子惯导系统中,以确定初始系统模型。
11、可选地,所述基于欧拉平台误差角,根据所述初始系统模型确定频域系统方程,具体包括:
12、根据公式
13、
14、确定频域系统方程;
15、其中,δvn(s)表示vn(s)的偏差,vn(s)表示北向速度的拉氏变换,φx(s)表示水平失准角的拉氏变换,φz(s)表示方位失准角的拉氏变换,表示修正角速度的拉氏变换,m1、m2、mn、mu均表示系统内部参数,g表示重力加速度,ω表示φx与φz关联项系数,表示纬度信息,δvn0表示vn0的偏差,vn0表示北向速度初始值,φx0表示水平失准角初始值,φz0表示方位失准角初始值,表示修正角速度,δan(s)表示北向加速度计零偏,εe(s)表示东向陀螺仪漂移,εu(s)表示天向陀螺仪漂移。
16、可选地,所述对所述频域系统方程进行状态求解,确定系统对准控制参数,具体包括:
17、根据公式
18、m1=m2=2ξωn
19、
20、
21、确定系统对准控制参数为ωn;
22、其中,m1、m2、mn、mu均表示系统内部参数,g表示重力加速度,ω表示φx与φz关联项系数,φx表示水平失准角,φz表示方位失准角,表示纬度信息,ξ表示阻尼系数,ωn表示无阻尼振荡频率,φz表示方位大失准角。
23、可选地,所述根据所述系统对准控制参数,确定所述系统对准控制参数的时变函数,具体包括:
24、根据公式确定所述系统对准控制参数的时变函数;
25、其中,ω1=ω2+k*t,t表示系统对准控制参数的切换时长,k表示斜坡响应斜率,ω1表示罗经对准初期的系统对准控制参数,ω2表示罗经对准末期的系统对准控制参数,ts∈(t1,t2),t1表示罗经对准初期的时刻,t2表示罗经对准末期的时刻,φz表示方位大失准角。
26、为达上述目的,本发明还提供了如下技术方案:
27、一种基于时变参数的捷联罗经对准系统,所述捷联罗经对准系统包括:
28、初始模型确定模块,用于根据主惯导系统的导航信息,确定初始系统模型;所述初始系统模型为待对准的子惯导系统的系统模型;
29、频域方程确定模块,用于基于欧拉平台误差角,根据所述初始系统模型确定频域系统方程;所述频域系统方程为待对准的子惯导系统在静基座条件下的频域方程;
30、控制参数计算模块,用于对所述频域系统方程进行状态求解,确定系统对准控制参数;
31、时变函数确定模块,用于根据所述系统对准控制参数,确定所述系统对准控制参数的时变函数;
32、罗经对准模块,用于依据所述系统对准控制参数的时变函数,对不同时刻的所述待对准的子惯导系统进行罗经对准。
33、可选地,所述初始模型确定模块,具体包括:
34、模型初始确定子模块,用于将主惯导系统采集到的初始速度和初始位置输入至待对准的子惯导系统中,以确定初始系统模型。
35、可选地,所述频域方程确定模块,具体包括:
36、频域方程子模块,用于根据公式
37、
38、确定频域系统方程;
39、其中,δvn(s)表示vn(s)的偏差,vn(s)表示北向速度的拉氏变换,φx(s)表示水平失准角的拉氏变换,φz(s)表示方位失准角的拉氏变换,表示修正角速度的拉氏变换,m1、m2、mn、mu均表示系统内部参数,g表示重力加速度,ω表示φx与φz关联项系数,表示纬度信息,δvn0表示vn0的偏差,vn0表示北向速度初始值,φx0表示水平失准角初始值,φz0表示方位失准角初始值,表示修正角速度,δan(s)表示北向加速度计零偏,εe(s)表示东向陀螺仪漂移,εu(s)表示天向陀螺仪漂移。
40、可选地,所述控制参数计算模块,具体包括:
41、控制参数子模块,用于根据公式
42、m1=m2=2ξωn
43、
44、
45、确定系统对准控制参数为ωn;
46、其中,m1、m2、mn、mu均表示系统内部参数,g表示重力加速度,ω表示φx与φz关联项系数,φx表示水平失准角,φz表示方位失准角,表示纬度信息,ξ表示阻尼系数,ωn表示无阻尼振荡频率,φz表示方位大失准角。
47、可选地,所述时变函数确定模块,具体包括:
48、函数确定子模块,用于根据公式确定所述系统对准控制参数的时变函数;
49、其中,ω1=ω2+k*t,t表示系统对准控制参数的切换时长,k表示斜坡响应斜率,ω1表示罗经对准初期的系统对准控制参数,ω2表示罗经对准末期的系统对准控制参数,ts∈(t1,t2),t1表示罗经对准初期的时刻,t2表示罗经对准末期的时刻,φz表示方位大失准角。
50、根据本发明提供的具体实施例,本发明公开了以下技术效果:
51、本发明提供了一种基于时变参数的捷联罗经对准方法及系统,基于欧拉平台误差角,确定待对准的子惯导系统在静基座条件下的频域方程,对频域方程求解以确定系统对准控制参数,进而确定系统对准控制参数的时变函数。依据所确定的系统对准控制参数的时变函数对不同时刻的待对准的子惯导系统进行罗经对准,使得在方位大失准角情况下,进行多个时刻罗经对准,提高罗经对准的精确度。
- 还没有人留言评论。精彩留言会获得点赞!