一种基于极大似然的子阵回波数据匹配测角方法与流程
1.本发明涉及无线通信技术领域,特别涉及一种基于极大似然的子阵回波数据匹配测角方法。
背景技术:
2.阵列信号处理是指将一组能感应空间传播信号并能以某种形式传输的传感器,按某种顺序分布在空间不同位置上继而形成传感器阵列,并借由传感器阵列接收空域传播信号,从而得到空间入射信号的离散数据。
3.阵列信号处理的目的就是借由对天线阵列接收到的入射信号作特定处理,使波束形成器在增强感兴趣或需要的有用信号的同时,将不期望接收到的干扰和噪声分量抑制掉,这样才能有效地得到需要信号的特征信息并进行性能分析。
4.自适应波束形成作为阵列信号处理重要的内容之一,能自动测得工作环境的杂波和干扰的特性,分析出主要干扰的作用方式,自动采取相应的抗干扰方案,并且能随环境的变化自适应的调整工作参数,达到某种最佳的性能。
5.然而,在相控阵雷达特别是多功能相控阵雷达中,阵列一般包含有几百至上千个阵元。如果对这种大型阵列进行阵元级的数字波束形成,每一个接收通道都包含放大器件、混频器件和模数转换器件,大大增加了系统开销,同时通道数过多而导致的通道间的一致性变差。因而对于大型阵列通常采用子阵结构,这样减小了硬件成本和工程实现的复杂度。子阵级自适应处理具有计算量小、收敛速度快、接收系统硬件设备少等优点。因此,子阵级的自适应数字波束形成研究是相控阵雷达的关键技术之一。
6.角度测量是雷达系统的基本任务,承担制导或精密跟踪任务的雷达系统,要求以较高的精度实现对目标的角度测量及跟踪。目前,针对子阵回波数据的测角功能相关文献甚少,该领域研究仍处于薄弱环节。因此,需要重视并加强有关子阵回波数据的测角研究。
技术实现要素:
7.针对上述现有技术中存在的问题,本发明的目的是提供一种基于极大似然的子阵回波数据匹配测角方法,该方法通过粗测角和精测角两步来实现。通过精确测角为后续点迹处理及目标跟踪奠定基础。
8.本发明采用的技术方案为:一种基于极大似然的子阵回波数据匹配测角方法,所述方法利用雷达子阵回波采样数据,得到通道之间的协方差逆矩阵;利用逆矩阵对子阵回波数据进行加权,对加权后的回波数据提取目标信息;最后将所述目标信息与导向矢量遍历求取相关系数,取相关系数最大值对应的角度为目标的测角结果。
9.进一步的,所述方法以下述子阵回波数据作为计算基础:设定子阵回波数据为,维度为,即子阵级方位数为,俯仰数
为。
10.进一步的,所述方法包括:计算子阵回波数据的协方差矩阵及逆矩阵::;其中,为选取子阵回波数据样本,表示共轭转置,i是单位阵。
11.进一步的,所述利用逆矩阵对子阵回波数据进行加权为:所述利用逆矩阵对子阵回波数据进行加权为:为加权后的回波数据。
12.进一步的,所述对加权后的回波数据提取目标信息为:设定目标在第个距离门,则,维数为,为矩阵对子阵回波数据进行加权后提取的目标信息。
13.进一步的,所述方法包括:对目标的角度进行粗测量;1)设定角度粗测量搜索范围,方位维,为方位维搜索范围的最大值,俯仰维,为俯仰维搜索范围的最大值;为角度粗测量搜索步长;2)计算角度粗测量搜索角度对应的导向矢量,其中,其中j为虚数单位,为载频,和为需要遍历粗测角度搜索范围和对应的角度,和是距离指标,表示第个子阵的参考阵元在
轴方向上相对于原阵的参考阵元的距离,则是相对于轴方向上的距离,d为方位维和俯仰维阵元间距;3)计算角度粗测量的导向矢量与目标信息的相关系数,定义为定义为其中,为逆矩阵对子阵回波数据进行加权后提取的目标信息;4)取角度粗测量相关系数最大值所对应的角度为粗测角结果,其中,为角度粗测量结果,即为角度粗测量中最大值所对应的角度。
14.更进一步的,所述方法包括:对目标的角度进行精测量;以粗测量的结果作为方位维搜索范围以及俯仰维搜索范围的基础,以角度精测量搜索步长作为搜索步长进行遍历计算,取角度精测量相关系数最大值所对应的角度为精测角结果。
15.进一步的,设定角度精测量搜索范围为角度精测量以粗测量结果为基础,方位维搜索范围,俯仰维搜索范围:;为角度精测量搜索步长。
16.有益结果:本发明提出了一种基于极大似然的子阵回波数据匹配测角方法,该方法为子阵回波数据测角领域提供了技术支撑,改善目前自适应波束形成测角领域的薄弱现状;同时为了避免工程实现计算量较大的问题,该方法通过粗测角和精测角两步来实现。通过精确测角为后续点迹处理及目标跟踪奠定基础。
附图说明
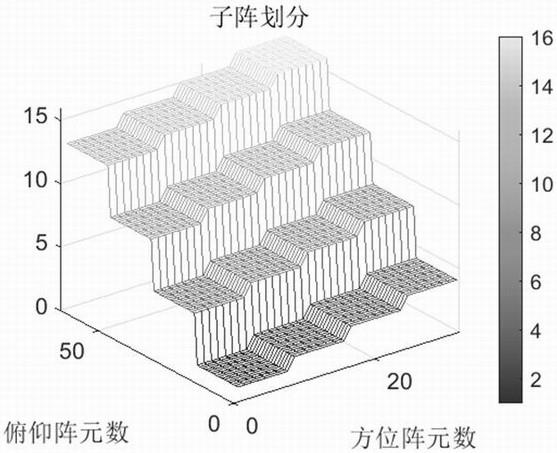
17.图1为子阵划分示意图;图2为干扰样本选取界面截图;图3为逆矩阵对子阵回波数据加权后结果界面截图;图4为子阵回波数据粗测角结果示意图;图5为子阵回波数据精测角结果示意图;图6为实施例中子阵回波数据测角结果随子阵snr变化情况曲线图;图7为子阵回波数据合成波束后的天线方向图。
具体实施方式
18.下面将结合附图对本发明的技术方案进行说明。所描述的实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
19.本实施例公开一种基于极大似然的子阵回波数据匹配测角方法,利用雷达子阵级回波采样数据,求取通道之间的协方差逆矩阵,对加权后的回波数据提取目标所在信息,并与导向矢量进行匹配,最终获取目标角度信息。为了避免工程实现计算量较大的问题,该方法通过粗测角和精测角两步来实现。通过精确测角为后续点迹处理及目标跟踪奠定基础。该方法具体包括如下步骤:假设子阵回波数据为,维度为,即子阵级方位数为,俯仰数为;步骤1:选取子阵回波数据样本,样本长度为l,其中,维数为。
20.步骤2:计算子阵回波数据的协方差矩阵及逆矩阵及逆矩阵及逆矩阵步骤3:利用逆矩阵对子阵回波数据进行加权步骤4:提取目标信息假设目标在第个距离门。
21.,维数为。
22.步骤5:子阵回波数据粗测角设定角度粗测量搜索范围方位维,为方位维搜索范围的最大值,俯仰维,为俯仰维搜索范围的最大值;为角度粗测量搜索步长,可设定为0.2
°
;计算搜索角度对应的导向矢量
其中,为载频,和需要遍历角度粗测量搜索范围和对应的角度,和是距离指标,前者表示第个子阵的参考阵元在轴方向上相对于原阵的参考阵元的距离,后者则是相对于轴方向上的距离,d为方位维和俯仰维阵元间距。
23.计算角度粗测量的导向矢量与目标信息的相关系数计算角度粗测量的导向矢量与目标信息的相关系数取相关系数最大值所对应的角度为测角结果步骤6:子阵回波数据精测角设定角度精测量搜索范围方位维搜索范围:,俯仰维搜索范围:;为精测角时角度搜索步长,可设定为0.01
°
;计算搜索角度对应的导向矢量计算搜索角度对应的导向矢量其中j为虚数单位,和需要遍历精测角度搜索范围和对应的角度,其他参数同角度粗测量,d为方位维和俯仰维阵元间距;计算导向矢量与目标信息的相关系数取相关系数最大值所对应的角度为最终测角结果。
24.具体实施例如下:方位32个阵元,俯仰64个阵元,方位俯仰间距为半波长;方位和俯仰(8
×
16)阵元合成1个子阵,如图1所示,子阵数为4
×
4=16。压制式干扰2个,干扰方位和俯仰角度分别为(2.2,-1.8)
°
、(-2.5,1.7)
°
,干扰比30~40db,见表1;目标在第468个距离门,子阵划分见图
1。
25.表1 2个干扰参数信息干扰数方位角(
°
)俯仰角(
°
)12.2-1.82-2.51.7按基本操作步骤体现子阵回波数据测角实施例结果:步骤1:选取子阵回波数据样本,样本长度为64,见图2。
26.步骤2:计算逆矩阵。
27.步骤3:利用逆矩阵对子阵回波数据进行加权,回波结果见图3。
28.步骤4:根据回波提取16个子阵的回波数据,记为tar_info。具体数值见表2。
29.表2 tar_info数值子阵通道数
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
回波数据
ꢀꢀꢀ
子阵通道数
ꢀꢀꢀꢀꢀ
回波数据1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7.57-0.08i 9
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5.72-5.36i2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9.04+3.32i
ꢀꢀꢀꢀ
10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12.28-1.48i3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5.62+7.36i
ꢀꢀꢀꢀ
11
ꢀꢀ
9.84+1.79i4
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4.73+9.27i
ꢀꢀꢀꢀ
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6.22+5.45i 5
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8.78-1.50i
ꢀꢀꢀꢀ
13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6.90-7.27i6
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10.95+2.53i
ꢀꢀꢀ
14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5.21-1.80i7
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8.50+5.93i
ꢀꢀꢀꢀ
15
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8.12+1.26i8
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6.59+6.22i
ꢀꢀꢀꢀ
16
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9.84+2.62i 步骤5:子阵回波数据粗测角设定角度搜索范围方位维(-2.5:0.2:2.5)
°
,俯仰维(-2:0.2:2)
°
;计算搜索角度对应的导向矢量以第一个方位和俯仰角(-2.5,-2)
°
为例,计算,维度为,见表3。
30.表3数值
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
数值
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
数值1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
0.54+0.07i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ9ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ‑
0.32-0.99i2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ‑
0.22-1.13i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
ꢀꢀꢀꢀꢀꢀ‑
1.06+0.68i3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ‑
0.25+0.92i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
ꢀꢀꢀꢀꢀꢀꢀ
1.24+0.08i4
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
0.60+0.22i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ‑
0.07-0.79i5
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
0.26-0.96i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ‑
0.58+0.20i6
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ‑
1.25+0.06i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
0.06+0.91i7
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
0.81+0.85i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
0.53-0.77i8
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
0.57-0.72i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ‑
0.45-0.12i计算方位和俯仰角(-2.5,-2)
°
对应的导向矢量与目标信息的相关系数对应的导向矢量与目标信息的相关系数
遍历完粗测角中所有的方位和俯仰角后,进行归一化处理,取最大值对应的角度为粗测角结果,见图4。
31.粗测角结果为(0.5,-0.6)
°
。
32.步骤6:子阵回波数据精测角设定角度搜索范围方位维(0.3:0.01:0.7)
°
,俯仰维(-0.8:0.01:-0.4)
°
;此时,导向矢量对应角度范围为精测角范围,其余步骤同粗测角,最终取最大值对应的角度即为精测角结果,见图5,精测角结果为(0.47,-0.55)
°
,测角结果与目标真实结果(0.48,-0.55)一致。
33.图6表明干扰为40db,测角结果随子阵snr变化情况。可以看出,当目标snr较低时,测角结果误差较大,随着snr增大,测角结果不断趋于并最终收敛于真实值。
34.本发明的技术方案不限于上述具体实施例的限制,凡是根据本发明的技术方案做出的技术变形,均落在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1