一种滚动轴承故障检测方法
1.本发明属于机械故障诊断技术领域,尤其涉及一种滚动轴承故障检测方法。
背景技术:
2.目前,现代工业技术的飞速发展,使得机器设备日益庞大和复杂。机器和设备如果出现缺陷,无法及时发现并修复缺陷的话,将影响工厂的生产效率,并会带来安全风险和重大经济损失。因此,如何及时、准确地诊断机械缺陷已成为重要的研究课题。滚动轴承应用广泛,也是机械设备的重要组成部分。滚动轴承的故障会影响机械运行并损坏机器。因此,需要实时监测滚动轴承的运行状况并进行故障诊断。
3.appana等人提出基于距离与密度的k最近邻(k-nearest neighbor,k-nn)的方法对滚动轴承故障进行了预测,并取得良好的结果。针对故障振动信号的低信噪比特征,孟凡磊等人先将振动信号局部特征分解成isc分量,再计算每个分量相关系数和峭度,再通过kmeans聚类算法对这些分量进行聚类,选出有用的isc分量,将有用的isc分量进行独立分量处理,选出峭度大的分量用来做用希尔伯特包络谱变换来预测故障。饶喆等人利用粒子群算法与kmeans聚类算法进行混合聚类算法,设计了一种基于自度适应粒子群的kmeans聚类算法,它在惯性权重调整和学习因子设置等方面有别于传统的混合聚类算法。但kmeans聚类算法通常随机选择k个初始的聚类中心,然后再来确定一个初始划分,一旦初始聚类中心选取不合理,就容易陷入局部最优解。而canopy算法往往用于kmeans算法之前,可弥补传统kmeans聚类算法随机选择初始聚类中心的缺陷,从而使得聚类效果更佳。邓海等人结合密度法和“最大最小原则”优化kmeans初始聚类中心点的选择,算法准确率得到提高,但是改进后算法的时间复杂度较高,运行时间较长。赵庆等人通过canopy算法对数据集进行“粗”聚类,避免了传统kmeans中心点选取存在的盲目性,极大提升了其准确性,然而在采用canopy算法初始阈值需要人为指定,所以聚类结果不稳定。刘纪伟等人结合密度思想优化了kmeans初始中心点的选取,同时引入聚类有效性判别函数确定值,提高了算法的准确度,但是也增加了算法的运行时间,执行效率较低。李晓瑜等人结合mapreduce分布式框架并行化实现改进的canopy-kmeans算法,并行化实现的算法具有良好的准确率和扩展性,但是canopy算法初始阈值人为指定的问题仍然存在。李琪等人针对canopy-kmeans算法初始中心点随机选取,算法受噪声点影响等问题提出了一种利用密度峰值改进的m-canopy_kmeans算法。陈胜发等人提出基于密度权重canopy的改进k-medoids算法用于提高算法精度。王海燕等人提出使用canopy+算法用于实现对t1,t2的改进。canopy算法的全局寻优性具有很好的聚类效果,因为它可以弥补传统kmeans算法随机选择初始聚类中心的缺陷。王林等人引入“最大最小原则”优化canopy中心点的选取,并借助三角不等式定理对kmeans算法进行优化,结果表明改进算法的准确率和扩展性都得到提升,但是canopy中心点的计算花费时间较长。
4.现有技术采用基于机器学习的滚动轴承故障预测方法有神经网络、模糊聚类、随机森林、k最近邻、支持向量机、卷积神经网络,其中聚类算法是机器学习中一种常用的无监
督学习方法,聚类算法可以将数据集分成若干个簇,从而进行滚动轴承故障预测。聚类算法是机器学习中一种常用的无监督学习方法,聚类算法可以将数据集分成若干个簇,从而进行滚动轴承故障检测。聚类算法kmeans作为其中最为常用的方法,通常需要随机选择k个初始聚类中心,而一旦初始聚类中心选取不合理,就容易陷入局部最优解。而canopy则可以先对数据进行粗聚类,得到k值后再进行细聚类。
5.通过上述分析,现有技术存在的问题及缺陷为:在进行故障诊断时,使用聚类方法只能识别已有的故障类型,而不能识别出混合类型或者未提供的故障类型。
技术实现要素:
6.针对现有技术存在的问题,本发明提供了一种滚动轴承故障检测方法。
7.本发明是这样实现的,一种滚动轴承故障检测方法,包括:
8.获取滚动轴承的原始振动信号,并采用基于小波包分解对原始振动信号进行预处理,得到特征向量,并进行归一化处理;
9.构建划分样本集,并按滚动轴承故障类别划分为训练集和测试集,提取滚动轴承的原始振动信号的时域和频域特征;
10.采用canopy-kmeans算法对滚动轴承故障检测模型进行训练,采用训练后的滚动轴承故障检测模型对滚动轴承故障检测,得到滚动轴承故障检测结果。
11.可选的,采用基于小波包分解对原始振动信号进行预处理,具体包括:
12.将一个原始振动信号x
i,j
(k)进行小波包分解至第i层,则按照公式(1)计算得到各个子频带信号的能量e
ij
:
[0013][0014]
其中x
i,j
(k)为原始振动信号,其中k为自变量,为第k个原始振动信号,k=1,
…
n,n为样本对象的原始振动信号的数量;s
i,j
(t)表示第i层第j个节点对应的分解信号,其中t表示为自变量,为原始振动信号时域持续时间。
[0015]
总能量e的计算如式(2):
[0016][0017]
信号的特征向量为各个子频带的能量占有百分比,则特征向量t表示为式(3):
[0018][0019]
其中,为提取的特征量;为子频带的能量,小波包分解滚动轴承的原始振动信号之后,获得多个由8个频段能量值构成的特征向量,这些特征向量可作为k均值聚类算法的输入。
[0020]
可选的,归一化处理,具体包括:
[0021]
按照公式(4)进行归一化处理:
[0022][0023]
式中:xi′
是特征向量中第i
′
个频段的能量值,其中i
′
=1,
……
,8;x
max
是特征向量中的最大值,x
min
是特征向量中的最小值,xi″
是第i
′
个频段归一化后的结果。
[0024]
可选的,canopy-kmeans算法:
[0025]
定义1:公式(5),样本对象xi和xj的欧氏距离为d
ij
:
[0026][0027]
其中,meandis(d)为所有样本对象的均值,d={x1,x2,
…
,xn}是包含n个样本对象的数据集合,每个样本对象含有d维特征属性;
[0028]
定义2:公式(6),数据集d中所有样本元素的欧氏距离为:
[0029][0030]
其中,x
jp
表示第j个样本对象的第p维特征属性,j=1,2,
…
,n,p=1,2,
…
,d,x
ip
表示第i个样本对象的第p维特征属性,i=1,2,
…
,n,p=1,2,
…
,d。
[0031]
可选的,canopy-kmeans算法从阈值获取方式和初始聚类中心的选取进行优化,阈值t1,t2的获取:遍历所有数据,通过公式(5)取所有样本对象的均值meandis(d),通过公式(5)计算均值点到所有数据点的距离,最远距离记作l1,最近距离记作l2,将赋值给t1,将赋值给t2。
[0032]
可选的,初始聚类中心通过最远最近原则来选取,最远最近原则的中心点选取方法为:在将数据集划分为若干个canopy的过程中,任意两个canopy中心点之间的距离应尽可能远,即假设目前已生成n个canopy中心点,则处于第n+1位的canopy中心点应为其它数据点和前n个中心点间最远间距的最小者,公式如(7):
[0033][0034]
式中,dn表示第n个中心点与候选数据点的最远距离;dislist表示前n个中心点与候选数据点最远距离的集合;dismin(n+1)则表示集合dislist中最远距离的最小者,即canopy集合的第n+1个中心点。
[0035]
可选的,canopy-kmeans算法,具体包括:
[0036]
步骤一,根据所给数据集计算出样本对象之间的欧氏距离,以及所有数据间的平均距离;
[0037]
步骤二,计算平均距离与个数据点之间的距离,最远距离记作l1,最近距离记作l2,将赋值给t1,将赋值给t2;
[0038]
步骤三,选取距离均值点最近的点c1作为第一个canopy的聚类中心,并将其原数据集中删除,将聚类中心c1添加到中心点集合c中,即c={c1};
[0039]
步骤四,计算数据集中的数据与c1之间的距离,如果距离小于t1,就把它分配到c1所在的canopy中,如果距离小于t2,就把它从数据集中删除;
[0040]
步骤五,第二个聚类中心c2为数据集中距离c1最远的点,将其从原数据集中删除,把c2添加到中心集合c中,即c={c1,c2};
[0041]
步骤六,计算数据集中的数据与c2之间的距离,如果距离小于t1,就把它分配到c2所在的canopy中,如果距离小于t2,就把它从数据集中删除;
[0042]
步骤七,以此类推,直到数据集为空;
[0043]
步骤八,将生成的canopy子集数目作为k值,canopy子集的中心点作为初始的聚类中心点进行kmeans聚类,得到优化后的聚类结果。
[0044]
可选的,聚类结果采用标准化信息、调整互信息和调整兰德系数对聚类结果进行评价。
[0045]
可选的,提取滚动轴承的原始振动信号的时域和频域特征,具体包括:
[0046]
利用修正周期图功率谱密度估计方法分别计算每组原始振动信号的功率谱,即正常工况p正常、第一类故障p故障1、第一类故障p故障2
……
第n类故障p故障n的功率谱;
[0047]
分别通过各工况下的功率谱减去正常工况下的连续谱,获得相应的各工况下的线谱;
[0048]
对各工况下的线谱进行简化及噪声处理,获得满足分析要求的各工况下的线谱。
[0049]
可选的,噪声处理采用谱减法和小波变换相结合,对滚动轴承故障的原始振动信号进行背景降噪,具体包括:所述谱减法对带噪滚动轴承振动进行去噪处理,采集的滚动轴承的故障点带噪声音信号为y(n),加窗处理后得到第i帧信号为yi(n),将其做离散傅里叶变换dft后为yi(n),其幅值为|yi(w)|,噪声平均能量为a为过减因子,b为增益补偿因子,谱减后信号的幅值为谱减后信号的幅值结合谱减前信号的相位经傅里叶逆变换得到经过谱减处理消噪的滚动轴承振动信号。
[0050]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明将canopy-kmeans算法中心点随机选取、阈值获取方法进行优化,能够在滚动轴承故障检测中自动识别出混合故障类型以及新的故障类型,为滚动轴承故障检测提供了新的方法。本发明采用改进后的canopy-kmeans算法进行故障诊断,减少了算法的时间复杂度,提高了算法的运行速度,并且可以识别出滚动轴承混合类型以及没有提供的滚动轴承故障类型。
[0051]
本发明在原始kmeans的基础上,使用了canopy算法进行粗聚类,可以有效地减少算法的时间复杂度,并且针对canopy算法的中心点以及阈值选取都做了改进,将此算法用于滚动轴承故障检测中可以有效提高准确率,并且可以检测出混合或者未识别的故障类型。
附图说明
[0052]
为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下还可以根据这些附图获得其他的附图。
[0053]
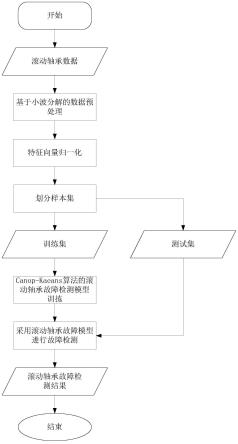
图1是本发明实施例提供的滚动轴承故障检测方法的流程图。
[0054]
图2是本发明实施例提供的滚动轴承故障检测方法的原理图。
具体实施方式
[0055]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0056]
实施例1:
[0057]
如图1和图2所示,本发明实施例提供的滚动轴承故障检测方法包括:
[0058]
s101:获取滚动轴承的原始振动信号,并采用基于小波包分解对原始振动信号进行预处理,得到特征向量,并进行归一化处理;
[0059]
s102:构建划分样本集,并按滚动轴承故障类别划分为训练集和测试集,提取滚动轴承的原始振动信号的时域和频域特征;
[0060]
s103:采用canopy-kmeans算法对滚动轴承故障检测模型进行训练,采用训练后的滚动轴承故障检测模型对滚动轴承故障检测,得到滚动轴承故障检测结果。
[0061]
本发明将canopy-kmeans算法中心点随机选取、阈值获取方法进行优化,能够在滚动轴承故障检测中自动识别出混合故障类型以及新的故障类型,为滚动轴承故障检测提供了新的方法。本发明采用改进后的canopy-kmeans算法进行故障诊断,减少了算法的时间复杂度,提高了算法的运行速度,并且可以识别出滚动轴承混合类型以及没有提供的滚动轴承故障类型。
[0062]
本发明在原始kmeans的基础上,使用了canopy算法进行粗聚类,可以有效地减少算法的时间复杂度,并且针对canopy算法的中心点以及阈值选取都做了改进,将此算法用于滚动轴承故障检测中可以有效提高准确率,并且可以检测出混合或者未识别的故障类型。
[0063]
实施例2:
[0064]
在实施例1的基础上,本发明实施例提供的步骤s101中采用基于小波包分解对原始振动信号进行预处理,具体包括:
[0065]
将一个原始振动信号x
i,j
(k)进行小波包分解至第i层,则按照公式(1)计算得到各个子频带信号的能量e
ij
:
[0066][0067]
其中x
i,j
(k)为原始振动信号,其中k为自变量,为第k个原始振动信号,k=1,
…
n,n为样本对象的原始振动信号的数量;s
i,j
(t)表示第i层第j个节点对应的分解信号,其中t表示为自变量,为原始振动信号时域持续时间。
[0068]
总能量e的计算如式(2):
[0069][0070]
信号的特征向量为各个子频带的能量占有百分比,则特征向量t表示为式(3):
[0071][0072]
其中,为提取的特征量;为子频带的能量,小波包分解滚动轴承的原始振动信号之后,获得多个由8个频段能量值构成的特征向量,这些特征向量可作为k均值聚类算法的输入。
[0073]
本发明根据帕塞瓦尔(parseval)定理,一个信号在其时域上的总能量与在频域上的总能量是相等的。对于小波包分解,只是将信号高频和低频成分分离出来,在信号形式上发生了变化,但是分解前后的总能量始终保持相等。本发明将滚动轴承的原始振动信号进行小波包分解,不同频段的能量分布代表滚动轴承不同的运行状态,包括正常状态、滚动体故障、内圈故障和外圈故障等运行状态。本发明对滚动轴承的原始振动信号进行三层小波包分解,在第3层得到8个频段的小波包分解系数,得到各频段的能量及其在总能量中的占比,由于滚动轴承不同运行状态对应的振动信号分解后,各个频段的能量比不同,可以用来构建特征向量。
[0074]
实施例3:
[0075]
在实施例1的基础上,本发明实施例提供的步骤s101的归一化处理,具体包括:
[0076]
按照公式(4)进行归一化处理:
[0077][0078]
式中:xi′
是特征向量中第i
′
个频段的能量值,其中i
′
=1,
……
,8;x
max
是特征向量中的最大值,x
min
是特征向量中的最小值,xi′
′
是第i
′
个频段归一化后的结果。
[0079]
本发明小波包分解滚动轴承的原始振动信号之后,获得多个由8个频段能量值构成的特征向量,并进行归一化处理,将滚动轴承振动数据经三层小波包分解后得到的特征向量,提高了滚动轴承检测模型的训练速度,为滚动轴承检测模型识别出滚动轴承混合类型以及没有提供的滚动轴承故障类型提供了保障。
[0080]
实施例4:
[0081]
在实施例1的基础上,本发明实施例提供的canopy-kmeans算法,具体包括:
[0082]
定义1:公式(5),样本对象xi和xj的欧氏距离为d
ij
:
[0083][0084]
其中,meandis(d)为所有样本对象的均值,d={x1,x2,
…
,xn}是包含n个样本对象的数据集合,每个样本对象含有d维特征属性;
[0085]
定义2:公式(6),数据集d中所有样本元素的欧氏距离为:
[0086][0087]
其中,其中x
ip
表示第i个样本对象的第p维特征属性,i=1,2,
…
,n,p=1,2,
…
,d,x
jp
表示第j个样本对象的第p维特征属性,j=1,2,
…
,n,p=1,2,
…
,d;
[0088]
改进的canopy-kmeans算法主要从阈值获取方式和初始聚类中心的选取两方面进
行优化,阈值t1,t2的获取:遍历所有数据,通过公式(5)取所有样本对象的均值meandis(d),通过公式(5)计算均值点到所有数据点的距离,最远距离记作l1,最近距离记作l2,将赋值给t1,将赋值给t2。
[0089]
初始聚类中心通过“最远最近原则”来选取,“最远最近原则”的中心点选取方法为:在将数据集划分为若干个canopy的过程中,任意两个canopy中心点之间的距离应尽可能远,即假设目前已生成n个canopy中心点,则处于第n+1位的canopy中心点应为其它数据点和前n个中心点间最远间距的最小者,公式如(7):
[0090][0091]
式中,dn表示第n个中心点与候选数据点的最远距离;dislist表示前n个中心点与候选数据点最远距离的集合;dismin(n+1)则表示集合dislist中最远距离的最小者,即canopy集合的第n+1个中心点。
[0092]
本发明改进的canopy-kmeans算法主要从阈值获取方式和初始聚类中心的选取两方面进行优化,能够在滚动轴承故障检测中自动识别出混合故障类型以及新的故障类型,为滚动轴承故障检测提供了新的方法。
[0093]
实施例5:
[0094]
在实施例4的基础上,本发明实施例提供的改进的canopy-kmeans算法,具体包括:
[0095]
步骤一,根据所给数据集计算出样本对象之间的欧氏距离,以及所有数据间的平均距离;
[0096]
步骤二,计算平均距离与个数据点之间的距离,最远距离记作l1,最近距离记作l2,将赋值给t1,将赋值给t2;
[0097]
步骤三,选取距离均值点最近的点c1作为第一个canopy的聚类中心,并将其原数据集中删除,将聚类中心c1添加到中心点集合c中,即c={c1};
[0098]
步骤四,计算数据集中的数据与c1之间的距离,如果距离小于t1,就把它分配到c1所在的canopy中,如果距离小于t2,就把它从数据集中删除;
[0099]
步骤五,第二个聚类中心c2为数据集中距离c1最远的点,将其从原数据集中删除,把c2添加到中心集合c中,即c={c1,c2};
[0100]
步骤六,计算数据集中的数据与c2之间的距离,如果距离小于t1,就把它分配到c2所在的canopy中,如果距离小于t2,就把它从数据集中删除;
[0101]
步骤七,以此类推,直到数据集为空;
[0102]
步骤八,将生成的canopy子集数目作为k值,canopy子集的中心点作为初始的聚类中心点进行kmeans聚类,得到优化后的聚类结果。
[0103]
本发明在原始kmeans的基础上,使用了canopy算法进行粗聚类,可以有效地减少算法的时间复杂度,并且针对canopy算法的中心点以及阈值选取都做了改进,将此算法用于滚动轴承故障检测中可以有效提高准确率,并且可以检测出混合或者未识别的故障类型。
[0104]
实施例6:
[0105]
在实施例4的基础上,本发明实施例提供的聚类结果有效性分析聚类结果有效性评价指标一般分为内部指标和外部指标。内部指标仅根据数据集本身来评价聚类质量。多数情况下,数据集的类别标签是已知的(聚类过程中不会使用),此时可以采用外部指标来评价聚类有效性,通常采用标准化信息(nmi,normalized mutual information)和调整互信息(ami,adjusted mutual information)来作为衡量聚类效果的指标。值越大意味着聚类结果与真实情况越吻合。另外,调整兰德系数(ari,adjusted rand index)也是比较流行的聚类结果有效性评价指标。因此,本发明采用nmi、ami、ari对聚类结果进行多角度评价。
[0106]
实施例7:
[0107]
在实施例1的基础上,本发明实施例提供的提取滚动轴承的原始振动信号的时域和频域特征,具体包括:
[0108]
利用修正周期图功率谱密度估计方法分别计算每组原始振动信号的功率谱,即正常工况p正常、第一类故障p故障1、第一类故障p故障2
……
第n类故障p故障n的功率谱;
[0109]
分别通过各工况下的功率谱减去正常工况下的连续谱,获得相应的各工况下的线谱;
[0110]
对各工况下的线谱进行简化及噪声处理,获得满足分析要求的各工况下的线谱。
[0111]
本发明对滚动轴承的原始振动信号进行时域和频域特征提取,同时基于功率谱分析对所述滚动轴承的原始振动信号进行距离特征的提取,提高了滚动轴承的原始振动信号的时域和频域特征质量,为建立滚动轴承故障检测模型和后期的故障检测提供了稳定和可靠的技术基础。
[0112]
实施例8:
[0113]
在实施例7的基础上,本发明实施例提供的噪声处理采用谱减法和小波变换相结合,对滚动轴承故障的原始振动信号进行背景降噪,具体包括:所述谱减法对带噪滚动轴承振动进行去噪处理,采集的滚动轴承的故障点带噪声音信号为y(n),加窗处理后得到第i帧信号为yi(n),将其做离散傅里叶变换dft后为yi(n),其幅值为|yi(w)|,噪声平均能量为a为过减因子,b为增益补偿因子,谱减后信号的幅值为谱减后信号的幅值结合谱减前信号的相位经傅里叶逆变换得到经过谱减处理消噪的滚动轴承振动信号,谱减算法为:
[0114][0115]
根据小波与采集滚动轴承振动信号样本数据的特性确定小波基与小波分解层数,选择阶数是15~25的小波基,小波分解层数取3~5。用小波变换对谱减法处理得到的信噪比提高的信号进行分析,进一步将滚动轴承振动信号与残留噪声分离开。
[0116]
本发明采用谱减法和小波变换去除数据相关性相结合用以对滚动轴承故障的原始振动信号进行背景降噪,提高了提取滚动轴承的原始振动信号的时域和频域特征的精确度,将滚动轴承的原始振动信号其中的噪声灵敏的分离出来,实时性好,运算量小,鲁棒性强,具有对噪声先验知识需求少的特性,精确度高;同时为滚动轴承故障检测模型的故障检测提供了稳定和可靠的技术基础。
[0117]
应当注意,本发明的实施方式可以通过硬件、软件或者软件和硬件的结合来实现。硬件部分可以利用专用逻辑来实现;软件部分可以存储在存储器中,由适当的指令执行系统,例如微处理器或者专用设计硬件来执行。本领域的普通技术人员可以理解上述的设备和方法可以使用计算机可执行指令和/或包含在处理器控制代码中来实现,例如在诸如磁盘、cd或dvd-rom的载体介质、诸如只读存储器(固件)的可编程的存储器或者诸如光学或电子信号载体的数据载体上提供了这样的代码。本发明的设备及其模块可以由诸如超大规模集成电路或门阵列、诸如逻辑芯片、晶体管等的半导体、或者诸如现场可编程门阵列、可编程逻辑设备等的可编程硬件设备的硬件电路实现,也可以用由各种类型的处理器执行的软件实现,也可以由上述硬件电路和软件的结合例如固件来实现。
[0118]
以上所述,仅为本发明较优的具体的实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1