一种基于云端服务的车辆里程错误判断方法、装置、修正方法及装置与流程
1.本发明涉及汽车电子技术领域,尤其涉及一种基于云端服务的车辆里程错误判断方法。
背景技术:
2.近几年车联网技术的快速发展,车联网已经成为现在主流车型的必备配置之一,通过车内控制器、车载通信终端、车联网云平台、车联网手机app等实现远程控车,车辆行驶信息查询等功能。但由于车内控制器、车载通信终端平台化设计的不够全面,或者整车设计存在缺陷,各部件对接过程中会存在一些非预期问题,车内上报的行驶里程数据出现突然变小、变大、里程无效值等里程跳变的情况,导致车辆网云平台(tsp)接收到的车辆行驶里程数据和仪表里程不符,进而导致用户通过车联网app查询的行驶里程信息不对,通过行驶里程做算法的应用(如保养提醒)结果错误等问题,导致最终用户抱怨。
3.现有技术cn113267201a提供一种车辆里程修正方法、装置、设备及可读存储介质。该方法包括:分别获取车辆在不同路况下行驶单位公里示波器捕捉的第一脉冲数;根据各个路况对应的第一脉冲数以及单位公里内理论脉冲数,得到各个路况对应的修正值;根据各个路况对应的修正值,得到修正系数。其主要公开了对组合仪表显示的里程数的修正,未对云端数据进行处理。
4.现有技术cn109556630a提出一种车辆行驶里程修正方法及装置,包括以下步骤:获取当前电池的剩余电量和车辆在预定时间内的平均能耗;根据电池的剩余电量和预定时间内的平均能耗计算车辆的初始行驶里程估计值;判断车辆的使用模式是否改变;如果车辆的使用模式改变,则根据使用模式变化信号、使用模式变化信号对应的部件的能耗及车辆的初始行驶里程估计值计算修正后的行驶里程估计值。其主要公开了通过预设胎压和补偿系数,对预设胎压读取周期内的车辆理论行驶距离进行校准,获得对应的实际行驶距离,未涉及云端数据修正。
5.因此,需要一种方法解决云端里程数据不准确的问题。
技术实现要素:
6.本发明解决了云端里程数据不准确的问题。
7.本发明提供了一种基于云端服务的车辆里程错误判断方法,所述方法包括:
8.基于云端获取车内车况信号,所述车内车况信号包括里程和车系;
9.解析获取的车内车况信号,获取里程信号;
10.根据里程信号获取所述车存缓的里程数据;
11.根据车存缓的里程数据获取标定系数;
12.基于标定系数和车存缓的里程数据相加,判断车存缓的里程数据是否出现问题。
13.进一步,提供一种优选实施例,所述获取车内车况还包括:根据车联网平台验证车
内车况的有效性。
14.进一步,提供一种优选实施例,所述根据车存缓的里程数据获取标定系数,具体为:
15.当所述汽车存缓的里程数据如果为第一条数据、作为不做处理,否则做如下处理:
16.将汽车存缓的里程数据与上一帧行驶的里程数据做减法运算获得处理结果,
17.如果所述处理结果小于零,将所述处理结果的里程数据作为非法摒弃处理;
18.如果所述处理结果大于2000m,作为非法摒弃处理;
19.如果所述处理结果大于零、且小于2000m时,将所述处理结果的里程数据作为标定系数的备选系数;
20.根据标定系数的备选系数获取所述车系对应的所有标定系数的备选系数;
21.将所述车系对应的所有标定系数的备选系数按从大到小排序,摒弃所述排序后的前10条标定系数的备选系数,将所述摒弃后的备选系数中第一条备选系数作为标定系数。
22.进一步,提供一种优选实施例,所述解析获取的车内车况,获取里程信号,所述获取的里程信号为10s一帧进行存储的云端数据。
23.基于同一发明构思,本发明提供一种基于云端服务的车辆里程错误判断装置,所述装置包括:
24.车况信号获取单元,用于基于云端获取车内车况信号,所述车内车况信号中包括里程信号和车系;
25.里程信号获取单元,用于解析获取的车内车况信号,获取里程信号;
26.里程数据获取单元,用于根据里程信号获取所述车存缓的里程数据;
27.标定系数判断单元,用于根据车存缓的里程数据获取标定系数;
28.里程数据判断单元,用于基于标定系数和车存缓的里程数据相加,判断里程数据是否出现问题。
29.进一步,提供一种优选实施例,所述车况获取单元还包括:根据车联网平台验证车内车况的有效性的子单元。
30.进一步,提供一种优选实施例,所述标定系数判断单元还包括:
31.将汽车存缓的里程数据与上一帧行驶的里程数据做减法运算获得处理结果的子单元;
32.如果所述处理结果小于零,将所述汽车存缓的里程数据作为非法摒弃处理的子单元;
33.如果所述处理结果大于2000m,将所述汽车存缓的里程数据作为非法摒弃处理的子单元;
34.如果所述处理结果大于零、且小于2000m,将所述汽车存缓的里程数据作为标定系数的备选系数的子单元;
35.根据标定系数的备选系数获取所述车系对应的所有标定系数的备选系数的子单元;
36.根据标定系数的备选系数获取所述车系对应的所有标定系数的备选系数的子单元;
37.将所述车系对应的所有标定系数的备选系数按从大到小排序,摒弃所述排序后的
前10条标定系数的备选系数,将所述摒弃后的备选系数中第一条备选系数作为标定系数的子单元。
38.进一步,提供一种优选实施例,所述解析获取的车内车况,获取里程信号,所述里程信号获取单元还包括:获取的里程信号为10s一帧进行存储的云端数据的子单元。
39.基于同一发明构思,本发明还提供一种基于云端服务的车辆里程错误修正方法,所述修正方法是基于上述所述的一种基于云端服务的车辆里程错误判断方法进行的修正,所述方法为:
40.将基于云端服务的车辆里程错误判断方法获取的标定系数和车存缓的里程数据相加,相加结果与当前帧里程数据比对;
41.所述相加结果超过当前帧里程数据,所述当前帧里程数据的上一帧里程数据作为车辆里程结果数据并进行云端存储;
42.所述相加结果在当前帧里程数据范围内,所述当前帧里程数据作为车辆里程数据结果并进行云端存储。
43.基于同一发明构思,本发明还提供一种基于云端服务的车辆里程错误修正装置,所述修正装置是基于上述所述的一种基于云端服务的车辆里程错误判断装置进行的修正,所述装置为:
44.数据比对单元,用于将基于云端服务的车辆里程错误判断方法获取的标定系数和车存缓的里程数据相加,相加结果与当前帧里程数据比对;
45.数据修正单元,用于所述相加结果超过当前帧里程数据,所述当前帧里程数据的上一帧里程数据作为车辆里程结果数据并进行云端存储;所述相加结果在当前帧里程数据范围内,所述当前帧里程数据作为车辆里程数据结果并进行云端存储。
46.本发明的有益之处在于:
47.本发明解决了云端里程数据不准确的问题。
48.(1)本发明通过在车联网云平台增加车辆上报行驶里程标定和修正等处理,对车内上报异常行驶里程数据进行修正,车联网云平台给其他应用使用的行驶里程数据为修正过的准确的数据,保证用户查看车联网app车辆行驶里程数据准确、同时保证其他使用里程做算法的应用计算结果准确。
49.(2)本发明提供了一种行驶里程获取里程标定系数和里程修正算法,通过云平台平台化的能力针对所有联网车辆,不区分已售车辆,还是未售车辆,只有上报给车辆行驶里程有异常,这部分车辆就被被修正,错误的里程被修正,保证车辆行驶里程的准确性。
50.(3)本发明主要针对云端状态机服务对车内上报的错误里程的修正处理,保障了云平台里程数据的准确性,与现有技术cn113267201a和cn109556630a的修正方法原理不同,提供了一种不同的里程修正方法。
51.本发明适用于汽车里程修正领域。
附图说明
52.图1为本实施方式二所述的车况数据存储流程。
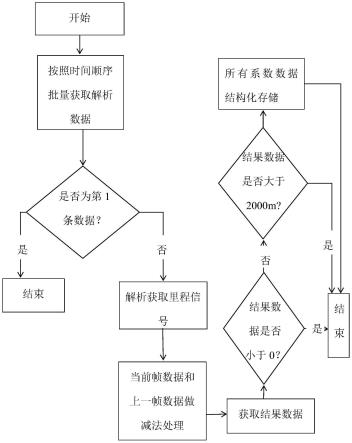
53.图2为本实施方式三所述的标定系数的备选系数获取流程。
54.图3为本实施方式三所述的标定系数获取流程。
55.图4为本实施方式九所述的一种基于云端服务的车辆里程错误修正方法流程图。
具体实施方式
56.为使本发明提供的技术方案的优点和有益之处表述得更具体,现结合附图对本发明提供的技术方案进行进一步详细地描述,具体的:
57.实施方式一、本实施方式所述的一种基于云端服务的车辆里程错误判断方法,所述方法包括:
58.基于云端获取车内车况信号,所述车内车况信号包括里程信号和车系;
59.解析获取的车内车况信号,获取里程信号;
60.根据里程信号获取所述车存缓的里程数据;
61.根据车存缓的里程数据获取标定系数;
62.基于标定系数和车存缓的里程数据相加,判断车存缓的里程数据是否出现问题。
63.实施方式二、本实施方式是对实施方式一所述的一种基于云端服务的车辆里程错误判断方法的进一步限定,所述获取车内车况还包括:根据车联网平台验证车内车况的有效性。
64.具体的,参见图1说明本实施方式。车联网云平台按照一定周期接收车内上报车况数据,接收数据后校验数据的有效性,无效数据舍弃;校验数据为有效数据时,后台根据数据协议进行解析,解析后的数据进行数据存储。
65.实施方式三、参见图2和图3说明实施方式。本实施方式是对实施方式一所述的一种基于云端服务的车辆里程错误判断方法的进一步限定,所述根据车存缓的里程数据获取标定系数,具体为:
66.当所述汽车存缓的里程数据如果为第一条数据、作为不做处理,否则做如下处理:
67.将汽车存缓的里程数据与上一帧行驶的里程数据做减法运算获得处理结果,
68.如果所述处理结果小于零,将所述处理结果的里程数据作为非法摒弃处理;
69.如果所述处理结果大于2000m,将所述处理结果的里程数据作为非法摒弃处理;
70.如果所述处理结果大于零、且小于2000m,将所述处理结果的里程数据作为标定系数的备选系数;
71.根据标定系数的备选系数获取所述车系对应的所有标定系数的备选系数;
72.将所述车系对应的所有标定系数的备选系数按从大到小排序,摒弃所述排序后的前10条标定系数的备选系数,将所述摒弃后的备选系数中第一条备选系数作为标定系数。
73.具体的,周期性启动离线调度任务,获取按照时间排序的解析后的车况数据。所述处理结果大于零,小于2000m时,作为标定系数的备选系数,所述处理结果的区间可根据实际情况确定。通常来说,不可能高于2000m。所述标定系数用于判定车辆上报行驶里程的正确性。
74.结合实施方式一举例说明本实施方式,判断车存缓的里程数据是否出现问题:
75.当标定系数为0.1105km时:上一帧里程数据为7139.12km,云端服务获取当前帧里程数为6000.11km,7139.12km》6000.11km,即总里程变小,里程数据有问题;
76.当标定系数为110.5m时:上一帧里程数据为7139.12km;云端服务获取当前帧里程数为8000.11km,相加后数值:7139.12km+0.1105m《8000.11km,总里程超过标定后的数值区
间,里程数据有问题;
77.当标定系数为110.5m时:上一帧里程数据为7139.12km;云端服务获取当前帧里程数为7139.22km,相加后数值:7139.12km+0.1105m《7139.22kmb并且7139.22km》7139.12km,里程数据无问题。
78.实施方式四、本实施方式是对实施方式一所述的一种基于云端服务的车辆里程错误判断方法的进一步限定,所述解析获取的车内车况,获取里程信号,所述获取的里程信号为10s一帧进行存储的云端数据。
79.在实际应用中,所述协议统一定义,不同车系车内上传数据频率不一样。本实施方式中,里程信号协议定义为车内10s上传一帧。
80.实施方式五、本实施方式所述的一种基于云端服务的车辆里程错误判断装置,其特征在于,所述装置包括:
81.车况信号获取单元,用于基于云端获取车内车况信号,所述车内车况信号中包括里程信号和车系;
82.里程信号获取单元,用于解析获取的车内车况信号,获取里程信号;
83.里程数据获取单元,用于根据里程信号获取所述车存缓的里程数据;
84.标定系数判断单元,用于根据车存缓的里程数据获取标定系数;
85.里程数据判断单元,用于基于标定系数和车存缓的里程数据相加,判断里程数据是否出现问题。
86.实施方式六、本实施方式是对实施方式五所述的一种基于云端服务的车辆里程错误判断装置的进一步限定,所述车况获取单元:根据车联网平台验证车内车况的有效性的子单元。
87.实施方式七、本实施方式是对实施方式五所述的一种基于云端服务的车辆里程错误判断装置的进一步限定,所述标定系数判断单元还包括:
88.将汽车存缓的里程数据与上一帧行驶的里程数据做减法运算获得处理结果的子单元;
89.如果所述处理结果小于零,将所述处理结果的里程数据作为非法摒弃处理的子单元;
90.如果所述处理结果大于2000m,将所述处理结果的里程数据作为非法摒弃处理的子单元;
91.如果所述处理结果大于零、且小于2000m,将所述处理结果的里程数据作为标定系数的备选系数的子单元;
92.根据标定系数的备选系数获取所述车系对应的所有标定系数的备选系数的子单元;
93.根据标定系数的备选系数获取所述车系对应的所有标定系数的备选系数的子单元;
94.将所述车系对应的所有标定系数的备选系数按从大到小排序,摒弃所述排序后的前10条标定系数的备选系数,将所述摒弃后的备选系数中第一条备选系数作为标定系数的子单元。
95.实施方式八、本实施方式是对实施方式五所述的一种基于云端服务的车辆里程错
误判断装置的进一步限定,所述获取的里程信号为10s一帧进行存储的云端数据。
96.实施方式九、参见图4说明本实施方式。本实施方式所述的一种基于云端服务的车辆里程错误修正方法,所述修正方法是基于实施方式一所述的一种基于云端服务的车辆里程错误判断方法进行的修正,所述方法为:
97.将基于云端服务的车辆里程错误判断方法获取的标定系数和车存缓的里程数据相加,相加结果与当前帧里程数据比对;
98.所述相加结果超过当前帧里程数据,所述当前帧里程数据的上一帧里程数据作为车辆里程结果数据并进行云端存储;
99.所述相加结果在当前帧里程数据范围内,所述当前帧里程数据作为车辆里程数据结果并进行云端存储。
100.参见图4说明本实施方式,具体的,车联网云平台按照一定周期接收车内上报车况数据,之后进行车况数据解析,解析后获取车辆行驶里程数据,获取该车缓存中的上一帧里程数据,并获取标定系数,上一帧里程数据和系数做加法处理,结果数据和该帧数据作比对,当前帧里程小于上一帧里程加系数,该帧数据判时定为有效数据,使用该帧数据更新缓存用余判定下一帧数据;当前帧里程大于上一帧里程加系数时,该帧数据判定为异常数据,使用上一帧替代该帧数据,上一帧数据更新缓存用余判定下一帧数据。
101.实施方式十、本实施方式所述的一种基于云端服务的车辆里程错误修正装置,所述修正装置是基于实施方式五所述的一种基于云端服务的车辆里程错误判断装置进行的修正,所述装置为:
102.数据比对单元,用于将基于云端服务的车辆里程错误判断方法获取的标定系数和车存缓的里程数据相加,相加结果与当前帧里程数据比对;
103.数据修正单元,用于所述相加结果超过当前帧里程数据,所述当前帧里程数据的上一帧里程数据作为车辆里程结果数据并进行云端存储;所述相加结果在当前帧里程数据范围内,所述当前帧里程数据作为车辆里程数据结果并进行云端存储。
104.以上结合附图对本发明提供的技术方案进行进一步详细地描述,是为了突出优点和有益之处,并不用于作为对本发明的限制,任何基于本发明的精神原则范围内的,对本发明的修改、实施方式的组合、改进和等同替换等,均应当包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1