一种用于卫星飞轮的在轨故障检测方法
1.本发明涉及卫星在轨飞轮系统故障检测领域,具体为一种用于卫星飞轮的在轨故障检测方法。
背景技术:
2.复杂多样的航天任务,对航天器的安全和可靠性提出了更高的要求,卫星作为当前应用最为广泛的一类航天器,其可选的执行机构主要包括磁力矩器、控制力矩陀螺、推力器以及反作用飞轮等。其中,反作用飞轮基于动量交换原理完成卫星姿态控制,具有能耗低、精度高的优点,成为常用的执行机构。处于太空复杂环境的反作用飞轮难以采用准确的数学模型进行描述,导致传统基于解析模型的故障诊断性能低下。
技术实现要素:
3.鉴于现有技术的不足,本发明旨在于提供一种用于卫星飞轮的在轨故障检测方法,通过将反作用飞轮的数学解析模型和神经网络模型相结合,实现对飞轮动力学行为的准确描述,通过将检测到的飞轮角速度、位置等信息与模型估计结果对比,实现故障检测。
4.为了解决上述技术问题,本发明提供如下技术方案:
5.一种用于卫星飞轮的在轨故障检测方法,包括反作用飞轮控制指令、反作用飞轮、飞轮状态测量传感器模块、故障检测计算机、n个状态延迟模块与故障检测模型;其中,所述方法包括以下步骤:
6.s1系统初始化,包括反飞轮解析模型参数初始化、故障检测阈值e
th
设定;。
7.s2反作用飞轮和反作用飞轮解析模型接收反作用飞轮控制指令,并各自运行,得到相应的状态输出结果yk和y
m,k
。
8.s3通过一级残差计算模块计算反作用飞轮和反作用飞轮解析模型的一级残差,该残差可表述为:
9.e
m,k
=y
k-y
m,k
10.s4将一级残差与故障检测阈值e
th
进行比较,判断反作用飞轮是否发生故障。
11.需要说明的是,所述步骤s1中的反作用飞轮解析模型可用下式进行描述:
[0012][0013][0014]
其中,
[0015]
f1(ω)=k
shs
(ω-ωssign(ω))
[0016]
f2(ω,im)=kfh
fvm
[0017]
f3(ω)=csin(n
t
ω/2)
[0018]vm
=v
bus-6-ke|ω|-hb(r
inibus
+1)
[0019][0020]
τv=[0.0049-0.00002(t+30)]
[0021][0022][0023][0024]
上式中:im为电机电枢电流;ω为飞轮转速;ωd为压流转换频率;gd为反作用飞轮的驱动增益;v
com
为控制器生成的控制电压;f1(ω)为转速极限回路反馈电压函数;j为飞轮转动惯量;k
t
为电机扭矩增益;τc为库伦摩擦力矩系数;sign(ω)为符号函数;f2(ω,im)为emf回路反馈电压;f3(ω)为电机扰动力矩函数;τv为黏性摩擦力矩系数;τ
noise
为轴承扰动力矩;γ=[γ1,γ2]
t
为系统扰动项;τ
out
为飞轮输出力矩;υ为测量噪声项;ks为超速循环增益;hf,hs,hb为开关函数;ωs为转速极限;kf为电压反馈增益;vm为反馈电压;c电机扰动常数;n
t
为电机极数;v
bus
为母线电压;ke为反向emf电压增益;r
in
为输入阻抗;i
bus
为母线电流;rb为电桥电阻;pq为静态功率;t为环境温度。各参数取值可根据飞轮具体型号进行调整;
[0025]
其中,电机电枢电流im与控制量rk相同;飞轮输出力矩τ
out
与飞轮状态输出yk相同。
[0026]
需要说明的是,反作用飞轮控制指令是由控制器发出的飞轮控制指令,接入反作用飞轮和故障检测计算机。
[0027]
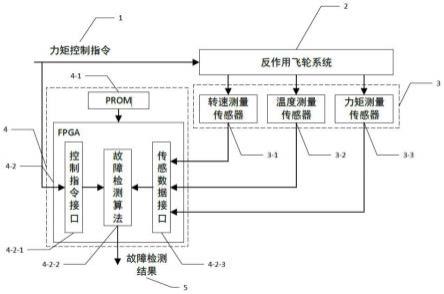
需要说明的是,飞轮状态测量传感器模块包括转速测量传感器、温度测量传感器、力矩测量传感器;故障检测计算机包括proprom型fpga配置芯片、xc4vfx12sfg363型fpga4-2;其中,转速测量传感器、温度测量传感器、力矩测量传感器的输入端分别与反作用飞轮的状态输出端连接。prom型fpga配置芯片的配置文件输入输出端与xc4vfx12sfg363型fpga4-2的配置文件输入输出端连接。
[0028]
需要说明的是,xc4vfx12sfg363型fpga4-2包括控制指令接收端口、故障检测算法与传感数据接口;其中控制指令接收端口4-2-1的输入端与反作用飞轮控制指令1连接,其输出端与故障检测算法输入端连接,传感数据接口的输入端分别与转速测量传感器、温度测量传感器和力矩测量传感器的输出端连接,其输出端与故障检测算法输入端连接,通过故障检测算法经过计算输出故障检测结果。
[0029]
需要说明的是,故障检测算法包括反作用飞轮状态延迟模块、反作用飞轮故障检测模型;其中,反作用飞轮状态延迟模块包括n个串联的状态延迟电路,反作用飞轮故障检测模型包括分反作用飞轮解析模型和一级残差计算模块。
[0030]
需要说明的是,反作用飞轮状态延迟模块6中n个状态延迟电路通过串联的方式连接。状态延迟电路6-1的输入端于传感数据接口的输出端连接;n个状态延迟电路的输出均与反作用飞轮解析模型的输入端连接。反作用飞轮解析模型的输入端还与控制指令接收端口的输出端连接。一级残差计算模块的输入端分别与传感数据接口的输出端和反作用飞轮解析模型的输出端连接。
[0031]
需要说明的是,所述故障检测模型中还包括了gmdh神经网络模型和二级残差计算
模块,其中状态延迟电路的输入端于传感数据接的输出端连接;n个状态延迟电路的输出均分别与反作用飞轮解析模型、gmdh神经网络模的输入端连接;反作用飞轮解析模型、gmdh神经网络模型的输入端与控制指令接收端口的输出端连接;一级残差计算模块的输入端分别与传感数据接口的输出端和反作用飞轮解析模型的输出端连接;二级残差计算模块的输入端分别与一级残差计算模块和gmdh神经网络模型的输出端连接。
[0032]
本发明有益效果在于,本发明包含系统扰动的一级残差对神经网络(gmdh)进行训练,修正了在不同工况下单解析模型的非线性建模误差降低了建模误差,进而降低了故障检测阈值中的建模误差项,提升故障检测精度。
附图说明
[0033]
图1是反作用飞轮系统故障检测系统结构示意图;
[0034]
图2是故障检测算法结构示意图。
具体实施方式
[0035]
下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0036]
本发明为一种用于卫星飞轮的在轨故障检测方法,包括反作用飞轮控制指令、反作用飞轮、飞轮状态测量传感器模块、故障检测计算机、n个状态延迟模块与故障检测模型;其中,所述方法包括以下步骤:
[0037]
s1系统初始化,包括反飞轮解析模型参数初始化、故障检测阈值e
th
设定;。
[0038]
s2反作用飞轮和反作用飞轮解析模型接收反作用飞轮控制指令,并各自运行,得到相应的状态输出结果yk和y
m,k
。
[0039]
s3通过一级残差计算模块计算反作用飞轮和反作用飞轮解析模型的一级残差,该残差可表述为:
[0040]em,k
=y
k-y
m,k
[0041]
s4将一级残差与故障检测阈值e
th
进行比较,判断反作用飞轮是否发生故障。
[0042]
需要说明的是,所述步骤s1中的反作用飞轮解析模型可用下式进行描述:
[0043][0044][0045]
其中,
[0046]
f1(ω)=k
shs
(ω-ωssign(ω))
[0047]
f2(ω,im)=kfh
fvm
[0048]
f3(ω)=csin(n
t
ω/2)
[0049]vm
=v
bus-6-ke|ω|-hb(r
inibus
+1)
[0050][0051]
τv=[0.0049-0.00002(t+30)]
[0052][0053][0054][0055]
上式中:im为电机电枢电流;ω为飞轮转速;ωd为压流转换频率;gd为反作用飞轮的驱动增益;v
com
为控制器生成的控制电压;f1(ω)为转速极限回路反馈电压函数;j为飞轮转动惯量;k
t
为电机扭矩增益;τc为库伦摩擦力矩系数;sign(ω)为符号函数;f2(ω,im)为emf回路反馈电压;f3(ω)为电机扰动力矩函数;τv为黏性摩擦力矩系数;τ
noise
为轴承扰动力矩;γ=[γ1,γ2]
t
为系统扰动项;τ
out
为飞轮输出力矩;υ为测量噪声项;ks为超速循环增益;hf,hs,hb为开关函数;ωs为转速极限;kf为电压反馈增益;vm为反馈电压;c电机扰动常数;n
t
为电机极数;v
bus
为母线电压;ke为反向emf电压增益;r
in
为输入阻抗;i
bus
为母线电流;rb为电桥电阻;pq为静态功率;t为环境温度。各参数取值可根据飞轮具体型号进行调整;
[0056]
其中,电机电枢电流im与控制量rk相同;飞轮输出力矩τ
out
与飞轮状态输出yk相同。
[0057]
进一步的,本发明的反作用飞轮控制指令是由控制器发出的飞轮控制指令,接入反作用飞轮和故障检测计算机。
[0058]
进一步的,本发明的飞轮状态测量传感器模块包括转速测量传感器、温度测量传感器、力矩测量传感器;故障检测计算机包括proprom型fpga配置芯片、xc4vfx12sfg363型fpga4-2;其中,转速测量传感器、温度测量传感器、力矩测量传感器的输入端分别与反作用飞轮的状态输出端连接。prom型fpga配置芯片的配置文件输入输出端与xc4vfx12sfg363型fpga4-2的配置文件输入输出端连接。
[0059]
进一步的,本发明的xc4vfx12sfg363型fpga4-2包括控制指令接收端口、故障检测算法与传感数据接口;其中控制指令接收端口4-2-1的输入端与反作用飞轮控制指令1连接,其输出端与故障检测算法输入端连接,传感数据接口的输入端分别与转速测量传感器、温度测量传感器和力矩测量传感器的输出端连接,其输出端与故障检测算法输入端连接,通过故障检测算法经过计算输出故障检测结果。
[0060]
进一步的,本发明的故障检测算法包括反作用飞轮状态延迟模块、反作用飞轮故障检测模型;其中,反作用飞轮状态延迟模块包括n个串联的状态延迟电路,反作用飞轮故障检测模型包括分反作用飞轮解析模型和一级残差计算模块。
[0061]
进一步的,本发明的反作用飞轮状态延迟模块6中n个状态延迟电路通过串联的方式连接。状态延迟电路6-1的输入端于传感数据接口的输出端连接;n个状态延迟电路的输出均与反作用飞轮解析模型的输入端连接。反作用飞轮解析模型的输入端还与控制指令接收端口的输出端连接。一级残差计算模块的输入端分别与传感数据接口的输出端和反作用飞轮解析模型的输出端连接。
[0062]
进一步的,本发明的所述故障检测模型中还包括了gmdh神经网络模型和二级残差
计算模块,其中状态延迟电路的输入端于传感数据接的输出端连接;n个状态延迟电路的输出均分别与反作用飞轮解析模型、gmdh神经网络模的输入端连接;反作用飞轮解析模型、gmdh神经网络模型的输入端与控制指令接收端口的输出端连接;一级残差计算模块的输入端分别与传感数据接口的输出端和反作用飞轮解析模型的输出端连接;二级残差计算模块的输入端分别与一级残差计算模块和gmdh神经网络模型的输出端连接。
[0063]
需要指出的是,在本发明提及的gmdh神经网络模型中,需要对其进行训练,具体的训练过程可使用以下步骤实现:
[0064]
s1准备用于构建第一层gmdh神经网络的数据。将用于构建神经网络的数据集分成训练集及验证集两部分。将用于训练和验证的数据进行归一化处理得到以及其中n
t
为训练集数据样本数,nc为验证集数据样本数。
[0065]
s2根据输入数据,生成新一层的神经网络,并对新生成层的神经元参数进行估计。在第k个训练样本下,新层网络的输入为rk∈rm,其中m为输入变量的维度。将输入变量两两组合,对应生成局部神经元的个数为p=m(m-1)/2。利用训练数据集进行参数估计,局部神经元输入为(x
k,i
,x
k,j
),i,j=1,2,
…
m且i≠j,k=1,2,
…
,n
t
。每个局部神经元对输入进行二项式拟合,如下式所示:
[0066][0067]
式中:表示第k个样本下第l层的第p个神经元输出;x
k,i
表示第k个样本下第i个系统输入;表示第l层的第p个神经元二项式拟合系数。计算过程如下:
[0068][0069][0070][0071]
x(a
l,p
)
t
=z
[0072]
通过上式得局部神经元参数的估计值:
[0073]al,p
=(x-1
z)
t
[0074]
s3利用评价准则对生成层局部神经元进行评价。将s2中得到的参数代入式,使用
测试数据集进行计算得到各局部神经元对的估计结果。局部神经元评价标准如下:
[0075][0076]
其中,
[0077][0078][0079][0080]
式中:θ1、θ2、θ3为常值系数;分别表示验证集以及神经元估计结果;eb表示模型偏差,用输出的均方根误差表示;ev表示模型输出的最大绝对误差值;f(l,q,m)表示网络复杂度,其中int()表示向下取整,l表示当前神经网络层数,m表示输入数据的维度,q表示拟合多项式的阶次。通过调整各项系数,可对评价标准的侧重点进行调整。
[0081]
在提出的评价标准中,用函数f(l,q,m)表示了网络的复杂度,最早出现全部输入变量的层数为l
min
=int[(m+1)/2],因此网络复杂度将会在出现完全使用输入变量的神经元的下一层开始增加。
[0082]
s4判断是否停止继续构建神经网络。按式的评价标准计算当前层所有局部神经元的评价值,并找到其中最小值令λ
l
=min(q
l
)。将λ
l
与前层神经元评价值的最小值λ
l-1
进行比较,如果若λ
l
≥λ
l-1
则停止继续构建网络,否则继续进行s5。当停止网络构建时,选择该层使得评价准则最小的神经元作为gmdh-type神经网络的最终输出单元,并根据该神经元的连接关系反向获取与之相关的各层神经元,最终得到整个gmdh-type神经网络结构。
[0083]
s5利用选取准则对当前层神经元进行选择。由于新生成层的神经元个数与输入维度之间是m(m-1)/2倍数的关系,所以需要对新生成层神经元进行选择,对神经网络规模进行控制,否则网络规模会呈指数型增长。具体的神经元选择方法是将前层评价标准的最小值λ
l-1
作为当前层神经元的选取准则。当时选择留下该神经元,将不满足上述不等式的神经元进行剔除。
[0084]
s6令当前层神经网络输出作为下层神经网络输入并重复步骤s2-步骤s5,神经网络层数l=l+1。新层输入变量的维数由于经过了选择,所以下层网络输入维数m值发生了变化。
[0085]
实施例1
[0086]
如图1、图2所示,本实施方式包括反作用飞轮控制指令1、反作用飞轮2、飞轮状态测量传感器模块3、故障检测计算机4、故障检测结果5、n个状态延迟模块6、故障检测模型7。
[0087]
其中,反作用飞轮控制指令1是由控制器发出的飞轮控制指令,接入反作用飞轮2、故障检测计算机3。
[0088]
其中,飞轮状态测量传感器模块3包括转速测量传感器3-1、温度测量传感器3-2、
力矩测量传感器3-3。故障检测计算机4包括proprom型fpga配置芯片4-1、xc4vfx12sfg363型fpga4-2。
[0089]
其中,转速测量传感器3-1、温度测量传感器3-2、力矩测量传感器3-3的输入端分别与反作用飞轮的状态输出端相连。prom型fpga配置芯片4-1的配置文件输入输出端与xc4vfx12sfg363型fpga4-2的配置文件输入输出端相连。其中xc4vfx12sfg363型fpga4-2包括三部分电路,通过硬件描述语言verilog编程实现,三部分电路分别为:控制指令接收端口4-2-1、故障检测算法4-2-2、传感数据接口4-2-3。其中控制指令接收端口4-2-1的输入端与反作用飞轮控制指令1相连,输出与故障检测算法4-2-2输入端相连。传感数据接口4-2-3的输入端分别与转速测量传感器3-1、温度测量传感器3-2、力矩测量传感器3-3的输出端相连,输出与故障检测算法4-2-2输入端相连。故障检测算法4-2-2经过计算输出故障检测结果5。
[0090]
其中,故障检测算法4包括反作用飞轮状态延迟模块6、反作用飞轮故障检测模型7。其中,反作用飞轮状态延迟模块6包括状态延迟6-1电路、状态延迟6-2电路、
···
、状态延迟电路6-n。反作用飞轮故障检测模型7包括分反作用飞轮解析模型7-1一级残差计算模块7-3。
[0091]
反作用飞轮状态延迟模块6中n个状态延迟电路通过串联的方式连接。状态延迟电路6-1的输入端于传感数据接口4-3的输出相连。n个状态延迟电路的输出均与反作用飞轮解析模型7-1的输入相连。反作用飞轮解析模型7-1的输入端还与控制指令接收端口4-2-1的输出端相连。一级残差计算模块7-3的输入端分别与传感数据接口4-3的输出和反作用飞轮解析模型7-1的输出相连。
[0092]
根据上述的连接关系,进一步的,执行本发明方法的步骤如下:
[0093]
s1系统初始化,包括反飞轮解析模型7-2模型参数初始化、故障检测阈值e
th
设定。其中反作用飞轮解析模型用下式进行描述:
[0094][0095][0096]
其中,
[0097]
f1(ω)=k
shs
(ω-ωssign(ω))
[0098]
f2(ω,im)=kfh
fvm
[0099]
f3(ω)=csin(n
t
ω/2)
[0100]vm
=v
bus-6-ke|ω|-hb(r
inibus
+1)
[0101][0102]
τv=[0.0049-0.00002(t+30)]
[0103]
[0104][0105][0106]
式中:im为电机电枢电流;ω为飞轮转速;ωd为压流转换频率;gd为反作用飞轮的驱动增益;v
com
为控制器生成的控制电压;f1(ω)为转速极限回路反馈电压函数;j为飞轮转动惯量;k
t
为电机扭矩增益;τc为库伦摩擦力矩系数;sign(ω)为符号函数;f2(ω,im)为emf回路反馈电压;f3(ω)为电机扰动力矩函数;τv为黏性摩擦力矩系数;τ
noise
为轴承扰动力矩;γ=[γ1,γ2]
t
为系统扰动项;τ
out
为飞轮输出力矩;υ为测量噪声项;ks为超速循环增益;hf,hs,hb为开关函数;ωs为转速极限;kf为电压反馈增益;vm为反馈电压;c电机扰动常数;n
t
为电机极数;v
bus
为母线电压;ke为反向emf电压增益;r
in
为输入阻抗;i
bus
为母线电流;rb为电桥电阻;pq为静态功率;t为环境温度。各参数取值可根据飞轮具体型号进行调整。
[0107]
其中,电机电枢电流im图2中所示的控制量rk相同。飞轮输出力矩τ
out
与图2中飞轮状态输出yk相同。
[0108]
s2反作用飞轮2和反作用飞轮解析模型7-1接收反作用飞轮控制指令1,并各自运行,得到相应的状态输出结果yk和y
m,k
。
[0109]
s3通过一级残差计算模块7-3计算反作用飞轮2和反作用飞轮解析模型7-1的一级残差,该残差可表述为:
[0110]em,k
=y
k-y
m,k
[0111]
s4将一级残差与故障检测阈值e
th
进行比较,判断反作用飞轮1是否发生故障。
[0112]
实施例2
[0113]
本实施例的组成和连接方式与实施例1相同,其区别在于飞轮故障检测模型7。
[0114]
本实施例中的飞轮故障检测模型7中还包括gmdh神经网络模型7-2和二级残差计算模块7-4。其中状态延迟电路6-1的输入端于传感数据接口4-3的输出相连。n个状态延迟电路的输出均分别与反作用飞轮解析模型7-1、gmdh神经网络模型7-2的输入相连。反作用飞轮解析模型7-1、gmdh神经网络模型7-2的输入端还与控制指令接收端口4-2-1的输出端相连。一级残差计算模块7-3的输入端分别与传感数据接口4-3的输出和反作用飞轮解析模型7-1的输出相连。二级残差计算模块7-4的输入端分别与一级残差计算模块7-3和gmdh神经网络模型7-2的输出相连。
[0115]
进一步的,在该实施方式中,二级残差计算模块7-4的输入与gmdh神经网络模型7-2的输出和一级残差计算模块7-3的输出相连,并计算二级残差,所得计算结果与故障检测阈值进行比较,以得到故障检测结果。
[0116]
对于本领域的技术人员来说,可以根据以上的技术方案和构思,给出各种相应的改变,而所有的这些改变,都应该包括在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1