多传感器融合定位系统、MCU和移动工具的制作方法
本发明涉及定位融合,尤其涉及一种多传感器融合定位系统、mcu和移动工具。
背景技术:
1、自动驾驶车辆能够高效利用交通资源,缓解交通拥堵、减少碳排放,自动驾驶技术越来越成为人们所关注的焦点。其中自动驾驶定位技术在自动驾驶系统中尤为重要,自动驾驶定位对不同场景有不同的需求,覆盖多种场景下高精度定位的需求日趋迫切。迫切需要开发一个能够满足全场景下的组合导航定位模块。
2、采用基于mpc5604+imax6u的硬件平台,定位方案是基于gnss(global navigationsatellite system,全球导航卫星系统)、imu(inertial measurement unit,惯性测量单元)、odom和lidar多传感器融合定位方案。
3、现有方案实现平台使用mpc5604+imax6u平台,这种系统设计需要部署ubuntu操作系统,采集传感器数据时,时间戳间隔不稳定,导致融合数据的时间戳间隔不稳定;操作系统在复杂场景下使用时存在4g信号网络差,存在系统不可控等风险,从而导致无法实现多场景的组合导航。
技术实现思路
1、本发明提供了一种多传感器融合定位系统、mcu和移动工具,以解决现有技术中的系统所存在的不能实现多场景下的组合导航的问题。
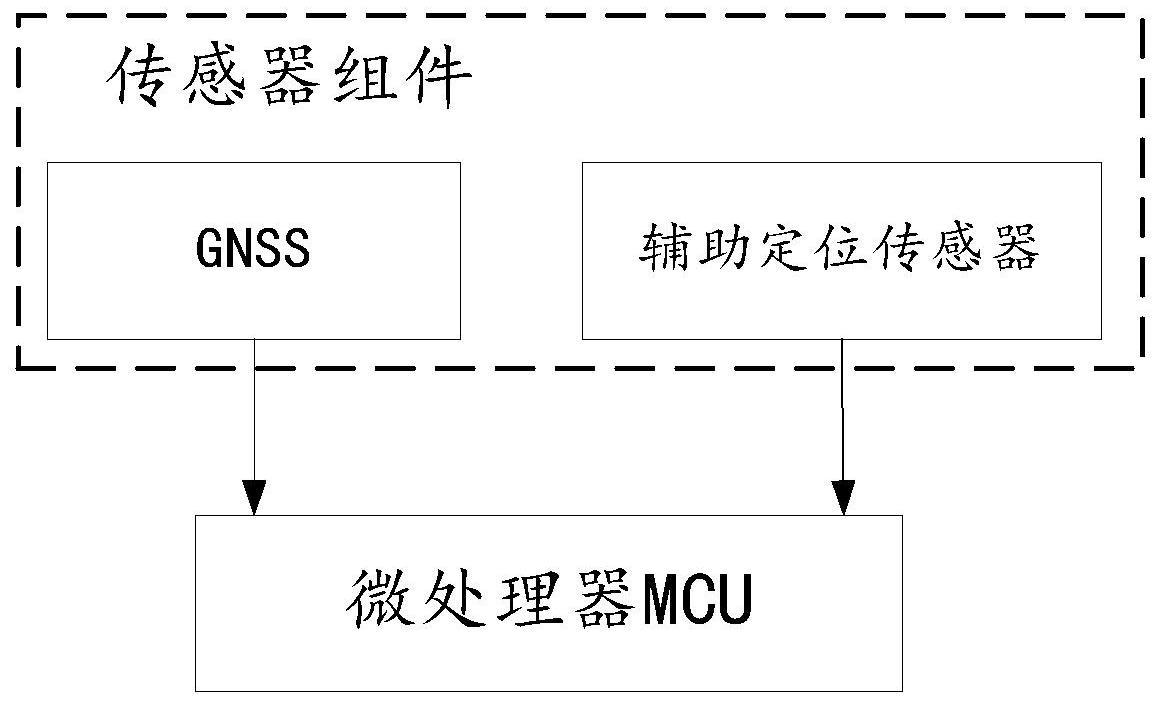
2、本发明第一方面提供了一种多传感器融合定位系统,所述系统包括:
3、传感器组件,所述传感器组件包括gnss和至少一个辅助定位传感器,所述gnss输出脉冲信号和包含第一时间信号的第一定位信息;所述辅助定位传感器输出第二定位信息;
4、微处理器mcu,在接收所述gnss发送的脉冲信号和第一定位信息后启动,并在接收到gnss发送的下一个脉冲信号时,通过所述第一时间信号对所述mcu内部的时钟信号进行修正,得到修正后的时钟信号;并将修正后的时钟信号添加在所述第一定位信息中,得到第一修正定位信息;在接收到各辅助定位传感器发送的第二定位信息后,将修正后的时钟信号分别添加在各第二定位信息中,得到第二修正定位信息;对所述第一修正定位信息和各第二修正定位信息进行融合处理,得到第一融合定位信息。
5、在一种可能的实现方式中,所述辅助定位传感器包括惯性测量单元imu。
6、在一种可能的实现方式中,所述辅助定位传感器还包括轮速计。
7、在一种可能的实现方式中,所述系统还包括自动驾驶控制器,所述辅助定位传感器还包括激光雷达;
8、所述激光雷达检测得到激光定位信息,并将所述微处理器mcu发送的修正后的时钟信号添加在所述激光定位信息中,得到修正激光定位信息;
9、自动驾驶控制器,接收所述激光雷达发送的修正激光定位信息,并根据预设的地图数据和所述修正激光定位信息,进行匹配定位后,得到匹配定位信息;
10、所述mcu进一步用于,接收所述自动驾驶控制器发送的匹配定位信息,并对所述匹配定位信息和所述第一融合定位信息进行融合处理,得到第二融合定位信息。
11、在一种可能的实现方式中,所述mcu根据扩展卡尔曼滤波算法进行融合处理。
12、本发明第二方面提供了一种mcu,所述mcu包括:
13、通信模块,用于接收gnss发送的脉冲信号和包含第一时间信号的第一定位信息,以及接收至少一个辅助定位传感器发送的第二定位信息;在接收到gnss发送的下一个脉冲信号时,启动时钟同步模块;
14、时钟同步模块,用于通过所述第一时间信号对所述mcu内部的时钟信号进行修正,得到修正后的时钟信号;并将修正后的时钟信号添加在所述第一定位信息中,得到第一修正定位信息;以及,将修正后的时钟信号分别添加在各第二定位信息中,得到第二修正定位信息;
15、融合定位模块,用于对所述第一修正定位信息和各第二修正定位信息进行融合,得到第一融合定位信息。
16、在一种可能的实现方式中,所述辅助定位传感器包括imu,所述mcu接收的第二定位信息包括imu检测到的定位信息。
17、在一种可能的实现方式中,所述辅助定位传感器还包括轮速计,所述mcu接收的第二定位信息包括轮速计检测到的定位信息。
18、在一种可能的实现方式中,所述辅助定位传感器还包括激光雷达;
19、所述通信模块接收自动驾驶控制器发送的匹配定位信息,其中,所述匹配定位信息由自动驾驶控制器根据预设地图数据和所述修正激光定位信息进行匹配定位得到:所述修正激光定位信息由激光雷达根据mcu通过通信模块发送的修正后的时钟信号添加到该激光雷达测到的激光定位信息中所得到的信息;
20、所述融合定位模块进一步用于,对所述匹配定位信息和所述第一融合定位信息进行融合处理,得到第二融合定位信息。
21、在一种可能的实现方式中,所述融合定位模块根据扩展卡尔曼滤波算法进行融合处理。
22、本发明第三方面提供了一种移动工具,包括第一方面任一项所述的多传感器融合定位系统。
23、本发明技术方案,一方面通过mcu实现多传感器的定位融合处理,即通过一个mcu部署多传感器的融合定位功能,能够解决现有技术使用mpc5604+imax6u平台进行多传感器定位融合处理,需要部署ubuntu操作系统而导致采集传感器数据时时间戳间隔不稳定而使得融合数据的时间戳间隔不稳定的问题;另一方面,采用本发明技术方案,mcu能够根据gnss发送的时钟信号对所有辅助传感器的定位信息进行时钟同步,从而实现多传感器定位信息的融合处理,本领域技术人员可以根据实际需求灵活布局辅助传感器的种类和数量,以实现更灵活的多场景的组合导航功能。
技术特征:
1.一种多传感器融合定位系统,其特征在于,所述系统包括:
2.根据权利要求1所述的系统,其特征在于,所述辅助定位传感器包括惯性测量单元imu。
3.根据权利要求1或2所述的系统,其特征在于,所述辅助定位传感器还包括轮速计。
4.根据权利要求1~3任一项所述的系统,其特征在于,所述系统还包括自动驾驶控制器,所述辅助定位传感器还包括激光雷达;
5.根据权利要求1所述的系统,其特征在于,所述mcu根据扩展卡尔曼滤波算法进行融合处理。
6.一种mcu,其特征在于,所述mcu包括:
7.根据权利要求6所述的mcu,其特征在于,所述辅助定位传感器包括imu,所述mcu接收的第二定位信息包括imu检测到的定位信息。
8.根据权利要求6或7所述的mcu,其特征在于,所述辅助定位传感器还包括轮速计,所述mcu接收的第二定位信息包括轮速计检测到的定位信息。
9.根据权利要求6~8任一项所述的mcu,其特征在于,所述辅助定位传感器还包括激光雷达;
10.根据权利要求6所述的mcu,其特征在于,所述融合定位模块根据扩展卡尔曼滤波算法进行融合处理。
11.一种移动工具,其特征在于,包括权利要求1~5任一项所述的多传感器融合定位系统。
技术总结
本发明提供了一种多传感器融合定位系统、方法及移动工具,系统包括:传感器组件,传感器组件包括第一传感器和第二传感器,第一传感器输出脉冲信号和包含第一时间信号的第一定位信息;第二传感器输出第二定位信息;第一运算模块,接收第一传感器发送的脉冲信号和第一定位信息后启动,并在接收到下一个脉冲信号时,通过第一时间信号对第一运算模块内部的时钟信号进行修正;并将修正后的时钟信号添加在第一定位信息中,得到第一修正定位信息;在接收到第二传感器发送的第二定位信息后,将修正后的时钟信号添加在第二定位信息中,得到第二修正定位信息;最后对第一修正定位信息和第二修正定位信息进行融合处理,得到第一融合定位信息。
技术研发人员:禹凯,王连升,张放
受保护的技术使用者:北京智行者科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!