一种用于检测角速度的装置、方法和系统与流程
本技术涉及微机电系统(micro electro mechanical system,mems)传感器、惯性器件,并且更具体地,涉及一种用于检测角速度的装置、方法和系统。
背景技术:
1、mems陀螺仪作为一种典型的微型惯性传感器,可以进行空间中的角速度或者角度的感知。由于其采用了微机械加工技术实现结构加工,从而具有体积小、成本低、功耗低等优点,在军民两用领域有着重要的应用价值,广泛应用于消费电子、医疗器械、汽车电子、矿山设备和港口设备等领域。
2、目前成熟商用的消费级、工业级mems陀螺仪产品中,多数多轴陀螺仪采用共享驱动结构,相对于拼接式(即由多个单轴陀螺仪组成,每个单轴陀螺仪均需要单独的驱动结构)的优势是集成度高、体积小、成本低。但是,一方面,多轴陀螺仪需要良好的机械耦合结构保证质量块的同步驱动,同时需要具有独立的检测模态和科氏力检测结构,因此需要良好的机械解耦结构降低交叉轴误差。另一方面,高性能的陀螺仪同样要求驱动模态、检测模态的机械运动需要具有高对称性来保证品质因数和结构稳定性,以实现低角速度随机游走、高零偏稳定性和低加速度敏感性等性能参数。当前已有的多轴陀螺仪结构中,上述要素往往难以同时实现,因此直接造成多轴陀螺仪难以实现高性能、或者轴间的性能差异较大。
3、因此,亟需一种用于检测角速度的装置、方法和系统,能够实现横滚、俯仰轴多轴角速度的检测,同时提高集成度、灵敏度、水平双轴的一致性,降低交叉轴耦合误差。
技术实现思路
1、本技术提供一种用于检测角速度的装置、方法和系统,能够实现横滚、俯仰轴角速度的检测,同时提高集成度、灵敏度、水平双轴的一致性,降低交叉轴耦合误差。
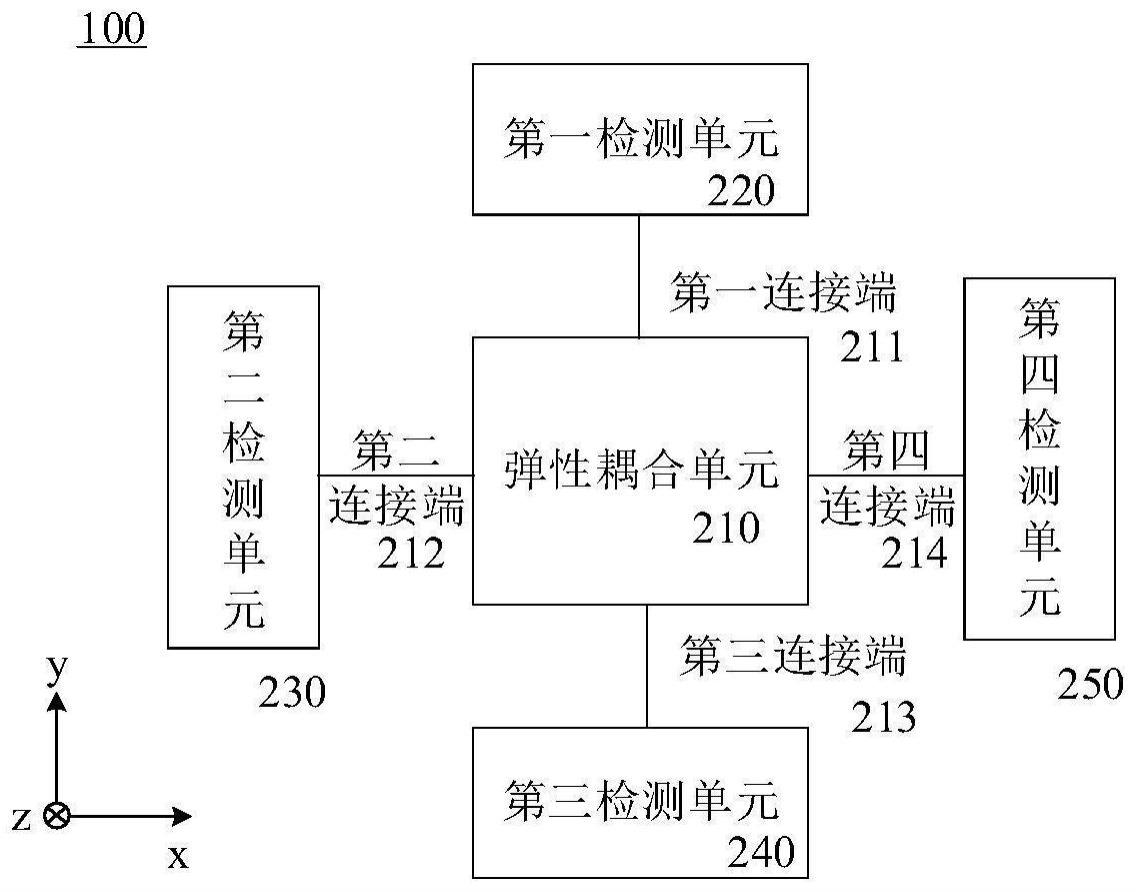
2、第一方面,提供了一种用于检测角速度的装置。该装置包括:第一检测单元、第二检测单元、第三检测单元、第四检测单元、弹性耦合单元。其中:弹性耦合单元用于产生四波腹运动,弹性耦合单元包括第一连接端、第二连接端、第三连接端和第四连接端,其中,第一连接端、第二连接端、第三连接端和第四连接端处于第一平面,第一检测单元,与第一连接端连接,第二检测单元,与第二连接端连接,第三检测单元,与第三连接端连接,第四检测单元,与第四连接端连接;其中,弹性耦合单元进行四波腹运动时,第一检测单元和第三检测单元能够沿第一轴进行反相线运动,第二检测单元和第四检测单元能够沿第二轴进行反相线运动,第一轴与第二轴正交;当外界角速度输入装置时,第一检测单元、第二检测单元、第三检测单元和第四检测单元中的至少一个能够在沿第三轴发生第一位移时输出第一信号,第三轴与第一平面垂直,第一信号用于指示第一位移的大小,第一位移用于确定角速度的大小。
3、本技术所揭示的装置,通过弹性耦合单元的四波腹运动,耦合四个检测单元实现平面内正交两个方向的线运动,能够实现横滚、俯仰轴角速度的检测,有助于提高集成度、灵敏度、水平双轴的一致性,降低交叉轴耦合误差。
4、应理解,上述第一轴和第二轴还可以是除y轴和x轴外的其他轴,只需要保证第一轴和第二轴正交即可,本技术对其不作限定。可选的,第三轴还可以是除z轴之外的其他轴,此时,第一平面可以是除x轴和y轴所在平面之外的其他平面,只需要保证第三轴与第一平面垂直即可,本技术对其不作限定。
5、结合第一方面,在第一方面的某些实现方式中,第一检测单元和第三检测单元关于弹性耦合单元中心对称配置,第二检测单元和第四检测单元关于弹性耦合单元中心对称配置。这样做,四个检测单元两两中心对称分布,有助于提高集成度、灵敏度、水平双轴的一致性,降低交叉轴耦合误差。
6、结合第一方面,在第一方面的某些实现方式中,上述装置还包括中心锚点和基底,弹性结构单元通过中心锚点与基底相连接。
7、结合第一方面,在第一方面的某些实现方式中,上述装置还包括中心支撑单元,中心支撑单元用于连接弹性耦合单元和中心锚点。
8、结合第一方面,在第一方面的某些实现方式中,第一检测单元包括第一质量块、第一铰链单元、第一解耦单元、第一支撑单元、第一锚点,第一质量块的第一端通过第一铰链单元、第一解耦单元与弹性耦合单元的第一节点相连接,第一铰链单元具有绕第二轴扭转的自由度,第一解耦单元具有绕第一轴扭转的自由度,第一质量块的第二端通过第一支撑单元和第一锚点与基底相连接,第一支撑单元具有绕第二轴扭转的自由度。第二检测单元包括第二质量块、第二铰链单元、第二解耦单元、第二支撑单元、第二锚点,第二质量块的第一端通过第二铰链单元、第二解耦单元与弹性耦合单元的第二节点相连接,第二铰链单元具有绕第一轴扭转的自由度,第二解耦单元具有绕第二轴扭转的自由度,第二质量块的第二端通过第二支撑单元和第二锚点与基底相连接,第二支撑单元具有绕第一轴扭转的自由度。第三检测单元包括第三质量块、第三铰链单元、第三解耦单元、第三支撑单元、第三锚点,第三质量块的第一端通过第三铰链单元、第三解耦单元与弹性耦合单元的第三节点相连接,第三铰链单元具有绕第二轴扭转的自由度,第三解耦单元具有绕第一轴扭转的自由度,第三质量块的第二端通过第三支撑单元和第三锚点与基底相连接,第三支撑单元具有绕第二轴扭转的自由度。第四检测单元包括第四质量块、第四铰链单元、第四解耦单元、第四支撑单元、第四锚点,第四质量块的第一端通过第四铰链单元、第四解耦单元与弹性耦合单元的第四节点相连接,第四铰链单元具有绕第一轴扭转的自由度,第四解耦单元具有绕第二轴扭转的自由度,第四质量块的第二端通过第四支撑单元和第四锚点与基底相连接,第四支撑单元具有绕第一轴扭转的自由度。
9、这样做,通过弹性耦合单元的连接以及铰链单元绕第一轴或第二轴的扭转自由度,实现第一轴、第二轴检测单元的差分扭转运动,能够实现横滚、俯仰轴角速度的检测,同时提高集成度、灵敏度、水平双轴的性能一致性。弹性耦合单元分别耦合第一轴、第二轴检测单元,分别实现第一轴、第二轴检测单元的质量块组的扭转运动具有良好的机械耦合。此外,四个解耦单元具有绕第一轴、第二轴的扭转自由度,能够实现第一轴、第二轴检测单元的扭转运动相互解耦,从而降低交叉轴耦合误差。
10、结合第一方面,在第一方面的某些实现方式中,第一检测单元包括第一驱动电容,第二检测单元包括第二驱动电容,第三检测单元包括第三驱动电容,第四检测单元包括第四驱动电容。第一驱动电容用于产生第一驱动力带动第一检测单元沿第一轴运动,第二驱动电容用于产生第二驱动力带动第二检测单元沿第二轴运动,第三驱动电容用于产生第三驱动力带动第一检测单元沿第一轴运动,第四驱动电容用于产生第四驱动力带动第二检测单元沿第二轴运动,其中,第一驱动力和第三驱动力反相,第二驱动力和第四驱动力反相,弹性耦合单元在第一检测单元、第二检测单元、第三检测单元和第四检测单元共同作用下,进行四波腹运动。这样做,四个检测单元上分别设置驱动电容,可以在第一轴正负方向以及第二轴正负方向上分别产生驱动力,在四个驱动力的共同作用下实现四个检测单元以及弹性耦合单元的四波腹运动,有助于提升驱动效率,减小功耗。
11、结合第一方面,在第一方面的另一些实现方式中,第一检测单元包括第一驱动电容,第三检测单元包括第三驱动电容。第一驱动电容用于产生第一驱动力带动第一检测单元沿第一轴运动,第三驱动电容用于产生第三驱动力带动第一检测单元沿第一轴运动,其中,第一驱动力和第三驱动力反相,第一检测单元和第三检测单元通过弹性耦合单元的四波腹运动,带动第二检测单元和第四检测单元沿第二轴进行反相线运动。或者,第二检测单元包括第二驱动电容,第四检测单元包括第四驱动电容。第二驱动电容用于产生第二驱动力带动第二检测单元沿第二轴运动,第四驱动电容用于产生第四驱动力带动第二检测单元沿第二轴运动,其中,第二驱动力和第四驱动力反相,第二检测单元和第四检测单元通过弹性耦合单元的四波腹运动,带动第一检测单元和第三检测单元沿第一轴进行反相线运动。这样做,只在两个检测单元上设置驱动电容,可以在第一轴正负方向或第二轴正负方向上分别产生驱动力,在两个驱动力的作用下实现四个检测单元以及弹性耦合单元的四波腹运动,有助于简化驱动电路,节约成本。
12、结合第一方面,在第一方面的某些实现方式中,上述装置还包括检测电极,检测电极与第一质量块和第三质量块中的至少一个组成横滚检测电容,横滚检测电容用于检测第一质量块或第三质量块沿第三轴的位移,并输出横滚电信号,横滚电信号用于指示装置在第二轴方向上的角速度;检测电极与第二质量块和第四质量块中的至少一个组成俯仰检测电容,俯仰检测电容用于检测第二质量块或第四质量块沿第三轴的位移,并输出俯仰电信号,俯仰电信号用于指示装置在第一轴方向上的角速度。
13、结合第一方面,在第一方面的某些实现方式中,当外界角速度输入上述装置时,弹性耦合单元进行四波腹运动,使得第一检测单元和第三检测单元绕第二轴反相翻转运动,第二检测单元和第四检测单元沿第一轴反相翻转运动。
14、结合第一方面,在第一方面的某些实现方式中,当外界角速度输入上述装置时,弹性耦合单元进行四波腹运动,使得第一检测单元和第三检测单元绕第一轴同相线运动,第二检测单元和第四检测单元沿第二轴同相线运动。
15、结合第一方面,在第一方面的某些实现方式中,上述弹性耦合单元包括以下一种结构:圆环、多圆环、方框、多方框、方板、椭圆环、多椭圆环、椭圆盘、菱形框、多菱形框、菱形盘。其中,这些结构均可以产生对称四波腹运动或者可以产生接近对称四波腹运动的结构,当弹性耦合单元式盘、板等装实体结构时,可以省去中心支撑单元,直接与中心锚点连接。
16、结合第一方面,在第一方面的某些实现方式中,上述装置还包括航向检测电容,航向检测电容包括固定航向检测电极和可动航向检测电极,可动航向检测电极与航向检测质量块相连接,航向检测质量块为第一质量块、第二质量块、第三质量块和第四质量块中的至少一个,航向检测电容用于检测航向检测质量块沿第三轴的位移,并输出航向电信号,航向电信号用于指示第三轴方向上的角速度。其中,航向检测质量块为第一质量块和第三质量块中的至少一个,与航向检测质量块相连接的支撑单元具有沿第一轴的弯曲自由度,与航向检测质量块相连接的解耦单元具有沿第二轴的弯曲自由度;或者,航向检测质量块为第二质量块和第四质量块中的至少一个,与航向检测质量块相连接的支撑单元具有沿第二轴的弯曲自由度,与航向检测质量块相连接的解耦单元具有沿第一轴的弯曲自由度。这样做,通过设置航向检测电容,可以实现第三轴角速度的检测。可选的,当装置中包括多个航向检测电容时,可以实现位移的差分检测。进一步地,当四个质量块上均设置有航向检测电容时,有助于提升装置的对称性以及检测的灵敏度。
17、结合第一方面,在第一方面的某些实现方式中,上述装置还包括驱动检测电容,驱动检测电容包括固定驱动检测电极和可动驱动检测电极,可动驱动检测电极与驱动检测质量块相连接,驱动检测质量块为第一质量块、第二质量块、第三质量块和第四质量块中的至少一个,驱动检测电容用于检测驱动检测质量块的位移,并输出驱动检测电信号,驱动检测电信号用于闭环反馈控制驱动模态的振动幅值、频率和相位。这样做,通过设置驱动检测电容输出驱动检测信号,能够实现装置的闭环控制。
18、结合第一方面,在第一方面的某些实现方式中,第一检测单元和第二检测单元关于弹性耦合单元的中心中心对称配置。这样做,有助于实现良好的交叉轴解耦,降低轴间耦合误差,同时提升测量的准确性。
19、第二方面,提供了一种用于检测角速度的系统。该系统包括:包括驱动检测电路、闭环控制电路、驱动电路以及如第一方面中任一项的装置,驱动检测电路用于对装置输出的驱动模态质量块位移电信号进行放大和移相处理,得到第一电信号,闭环控制电路对第一电信号进行计算处理,得到第二电信号,驱动电路根据第二电信号输出驱动信号,驱动信号用于驱动装置的弹性耦合单元进行四波腹运动,使得装置的第一质量块和第三质量块沿第一轴反相运动,装置的第二质量块和第四质量块沿第二轴反相运动。这样做,使得该系统可以实现闭环控制。
20、第三方面,提供了一种用于检测角速度的系统。该系统包括:横滚检测电路、俯仰检测电路和航行检测电路中的至少一个以及如权利要求1至15第一方面中任一项的装置,横滚检测电路用于对装置输出的横滚电信号进行处理得到第二轴角速度;俯仰检测电路用于对装置输出的俯仰电信号进行处理得到第一轴角速度;航向检测电路用于对装置输出的航向电信号进行处理得到第三轴角速度。
21、结合第三方面,在第三方面的某些实现方式中,上述横滚检测电路用于对装置输出的横滚电信号进行处理包括:横滚检测电路用于对装置输出的横滚电信号进行差分处理、放大处理和解调处理中的至少一种。
22、结合第三方面,在第三方面的某些实现方式中,上述俯仰检测电路用于对装置输出的俯仰电信号进行处理包括:俯仰检测电路用于对装置输出的俯仰电信号进行差分处理、放大处理和解调处理中的至少一种。
23、结合第三方面,在第三方面的某些实现方式中,上述航向检测电路用于对装置输出的航向电信号进行处理包括:航向检测电路用于对装置输出的航向电信号进行差分处理、放大处理和解调处理中的至少一种。
24、第四方面,提供了一种用于检测角速度的方法,该方法由上述第一方面中任一项的装置执行,该方法包括:当外界角速度输入装置时,第一检测单元、第二检测单元、第三检测单元和第四检测单元中的至少一个在沿第三轴发生第一位移时输出第一信号,第三轴与第一平面垂直,第一信号用于指示第一位移的大小,第一位移用于确定角速度的大小。其中,第一信号包括横滚电信号、俯仰电信号和航向电路信号中的至少一种。
- 还没有人留言评论。精彩留言会获得点赞!