一种基于单轴红外焦平面阵列的旋转弹丸姿态测量方法
1.本发明涉及旋转弹体的导航控制技术领域,具体是一种基于单轴红外焦平面阵列的旋转弹丸姿态测量方法。
背景技术:
2.精确制导武器作为实现现代战场目标打击的主要装备备受关注。其中,制导是实现智能弹药精确打击的核心技术,而弹丸飞行姿态这一关键参数的准确测量是实现精确制导的前提。弹载无源自主姿态测试方法主要包括惯性导航姿态测试技术、地磁导航姿态测试技术、太阳方位角姿态测试技术以及红外姿态测试技术,红外姿态测试技术则因为其无累计误差、抗干扰能力相对较好、姿态解算精度与实时性较高飞速发展。
3.基于红外的弹丸姿态测量方法研究很多,如中国专利申请号为201711214682.6中公开的一种基于新息正交性的复合姿态解算方法,融合红外与地磁姿态测试技术。何子路等人发表在《中国惯性技术学报》上的“利用地磁与红外辐射融合的姿态估计方法”建立了基于三轴单元红外传感器的姿态测量数学模型,并采用自适应扩展卡尔曼滤波切换姿态估计算法实现红外与地磁的融合姿态估计。基于红外的弹体姿态参数测试方法研究也很多,如中国专利申请号为201711216092.7中公开的一种基于红外与地磁复合的旋转弹体姿态测试装置,将红外姿态测试技术与地磁姿态测试技术进行结合,装置简单可靠。
4.然而,目前红外姿态测试方法的研究仍集中于三轴单点红外传感器布阵的基础上,单元红外传感器极易受红外辐射干扰,且三轴红外传感器的布阵容易存在较大安装误差,系统姿态角检测误差仍有待提高。
技术实现要素:
5.本发明的目的在于提供一种基于单轴红外焦平面阵列的旋转弹丸姿态测量方法,以解决上述背景技术中提出的问题。
6.本发明的技术方案是:一种基于单轴红外焦平面阵列的旋转弹丸姿态测量方法,包括以下步骤:
7.步骤1、红外焦平面阵列传感器数据预处理:在新型红外焦平面阵列各面元理论模型基础上,根据红外焦平面阵列传感器各敏感面元的衰减系数进行预处理;并将红外焦平面阵列时域信号进行拆分,重组成红外图像序列,采用双线性插值算法将红外图像进行扩展,最终利用线性变换将插值后的红外焦平面阵列数据映射为灰度图像;
8.步骤2、基于扩展红外图像的俯仰角解算:设计自适应双阈值对灰度图像进行二值化,突出纹理直线,采用hough变换算法实现纹理直线的检测与斜率计算,解算出弹丸俯仰角信息;
9.步骤3、基于扩展红外图像序列的相对横滚角解算:设计自适应双阈值对相邻序列灰度图像进行二值化后,分别采用hough变换算法检测高亮直线并获取边缘坐标集,建立相邻序列灰度图像同一阈值的边缘坐标关系,最终解算出弹体相对横滚角,通过积分求和便
可计算出弹丸的绝对横滚角。
10.优选的,所述步骤1红外焦平面阵列数据预处理具体包括以下步骤:
11.步骤1.1、单轴红外焦平面阵列各面元的理论模型可表示为:
[0012][0013]
其中,θ为弹体俯仰角,γ为弹体横滚角,传感器内含有a
×
b个红外热电堆阵列,t
sij
(θ,γ)为红外焦平面阵列第i行第j列面元输出,理论模型如下式所示:
[0014][0015]
其中,单元红外传感器视场角为α,αc为红外焦平面阵列传感器横向视场角,αr为纵向视场角。a为振幅系数,b为偏置,a与b通过实验标定得到。e
ij
可通过下式计算:
[0016][0017]
δγ
ij
可通过下式计算:
[0018][0019]
将弹体俯仰角及横滚角拆分重组成红外图像进行姿态解算;
[0020]
步骤1.2、在新型红外焦平面阵列各面元理论模型基础上,根据红外焦平面阵列传感器各敏感面元的衰减系数进行预处理,建立红外焦平面阵列系数矩阵:
[0021][0022]
其中,
[0023][0024]
经红外焦平面阵列系数矩阵预处理后的低像素红外焦平面阵列数据:
[0025][0026]
其中,
[0027]
t
′
sij
(θ,γ)=acosθsin(γ+δγ
ij
)+b
[0028]
上式中幅值a与偏置b可通过实验标定得出;
[0029]
步骤1.3、将预处理后的红外焦平面阵列时域信号进行拆分,重组成红外图像序
列,采用双线性插值算法将红外图像进行扩展;
[0030]
步骤1.4、根据实验标定的幅值和偏差,采用线性变换将插值后的红外焦平面阵列数据映射为灰度图像,最终可得到a
′×b′
的灰度图像ig:
[0031][0032]
其中,a
′
、b
′
需分别为红外焦平面阵列横向与纵向半视场角正切值的相同倍。
[0033]
优选的,所述步骤2基于扩展红外图像的俯仰角解算具体包括以下步骤:
[0034]
步骤2.1、首先根据灰度图像选择俯仰角解算自适应双阈值th1、th2:
[0035][0036]
分别采用th1、th2进行图像二值化得到i
g1
、i
g2
,通过异或运算突出纹理直线:
[0037][0038]
步骤2.2、采用hough变换算法实现纹理直线的检测,同时计算出纹理直线斜率k,利用下式便可直接解算弹体俯仰角:
[0039][0040]
优选的,所述步骤3基于扩展红外图像序列的相对横滚角解算具体包括以下步骤:
[0041]
步骤3.1、相邻序列图像之间的相对滚动角可由相邻序列灰度图像中载体横滚角中心线上灰度值相同的像素的坐标计算得到,对相邻序列扩展灰度图像i
g1
、i
g2
进行处理,得到重叠灰度范围的上下限:
[0042][0043]
根据灰度范围上下限设置相对横滚角解算自适应双阈值th3、th4:
[0044][0045]
步骤3.2、利用双阈值分别对灰度图像i
g1
、i
g2
进行二值化及异或运算后,采用hough变换算法检测高亮直线并获取像素坐标集{(x1,y1)}、{(x2,y2)};
[0046]
步骤3.3、建立相邻序列灰度图像同一阈值的边缘坐标关系,提取边缘关键坐标点x
rollmin
、x
rollmax
,弹丸相对横滚角的绝对值可通过下式进行计算:
[0047][0048]
可通过积分求和的方式获得绝对横滚角,如下式所示:
[0049]
γ=∑γi。
[0050]
本发明通过改进在此提供一种基于单轴红外焦平面阵列的旋转弹丸姿态测量方法,与现有技术相比,具有如下改进及优点:
[0051]
其一:本发明在现有的新型红外焦平面阵列各面元理论模型基础上,针对红外焦平面阵列多面元的特点,设计了一种基于单轴红外焦平面阵列的旋转弹丸姿态测量方法,拓展了红外姿态测试理论,为基于红外焦平面阵列的姿态测量提供了新思路与新方法;
[0052]
其二:本发明利用红外焦平面阵列传感器的整体面元数据进行弹体俯仰角及横滚角的解算,对单个红外辐射测量数值依赖性较低,提高测量方法可靠性;
[0053]
其三:本发明简化了红外测姿方法的安装布阵,由常规的三轴单点红外传感器转变为采用单轴红外焦平面阵列传感器布阵方式,减少了安装误差对姿态测试造成的影响,进一步提高了红外姿态测试方法精度以及使用简便性。
附图说明
[0054]
下面结合附图和实施例对本发明作进一步解释:
[0055]
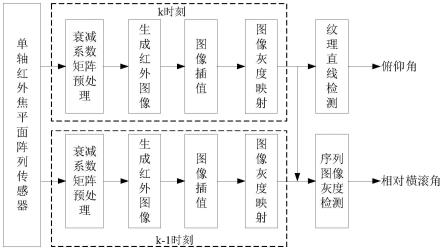
图1是本发明方法的流程框图。
[0056]
图2为本发明方法单轴红外焦平面阵列传感器布阵示意图。
[0057]
图3为本发明方法基于单轴红外焦平面阵列传感器的姿态测量示意图。
[0058]
图4为本发明方法相对横滚角解算中关键坐标点提取的四种情况示意图(a表示相邻两帧均为1条边缘,b表示相邻两帧分别为1条与2条边缘,c表示相邻两帧分别为2条与1条边缘,d表示相邻两帧均为2条边缘)。
[0059]
图5为采用本发明所述方法的弹丸俯仰角及横滚角求解误差曲线。
具体实施方式
[0060]
下面对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0061]
本发明通过改进在此提供一种基于单轴红外焦平面阵列的旋转弹丸姿态测量方法,本发明的技术方案是:
[0062]
如图1-图5所示,一种基于单轴红外焦平面阵列的旋转弹丸姿态测量方法,包括以下步骤:
[0063]
步骤1、红外焦平面阵列传感器数据预处理:在现有的新型红外焦平面阵列各面元理论模型基础上,根据红外焦平面阵列传感器各敏感面元的衰减系数进行预处理;并将红
外焦平面阵列时域信号进行拆分,重组成红外图像序列。为弥补红外焦平面阵列像素数低的缺点,提高解算精度,采用双线性插值算法将红外图像进行扩展。最终利用线性变换将插值后的红外焦平面阵列数据映射为灰度图像;
[0064]
步骤1.1、单轴红外焦平面阵列各面元的理论模型可表示为:
[0065][0066]
其中,θ为弹体俯仰角,γ为弹体横滚角。传感器内含有a
×
b个红外热电堆阵列(a、b均为偶数)。t
sij
(θ,γ)为红外焦平面阵列第i行第j列面元输出,理论模型如下式所示:
[0067][0068]
其中,单元红外传感器视场角为α,αc为红外焦平面阵列传感器横向视场角,αr为纵向视场角。a为振幅系数,b为偏置,a与b通过实验标定得到。e
ij
可通过下式计算:
[0069][0070]
δγ
ij
可通过下式计算:
[0071][0072]
因此,在单轴红外焦平面阵列传感器布阵情况下,由于各面元参数δγ
ij
互不相同,通过时域信号直接解算弹体俯仰角及横滚角较为困难,可将其拆分重组成红外图像进行姿态解算。
[0073]
步骤1.2、在现有的新型红外焦平面阵列各面元理论模型基础上,根据红外焦平面阵列传感器各敏感面元的衰减系数进行预处理。
[0074]
建立红外焦平面阵列系数矩阵:
[0075][0076]
其中,
[0077][0078]
因此,经红外焦平面阵列系数矩阵预处理后的低像素红外焦平面阵列数据:
[0079][0080]
其中,
[0081]
t
′
sij
(θ,γ)=acosθsin(γ+δγ
ij
)+b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0082]
上式中幅值a与偏置b可通过实验标定得出。
[0083]
步骤1.3、将红外焦平面阵列时域信号进行拆分,重组成红外图像序列。为弥补红外焦平面阵列像素数低的缺点,提高解算精度,采用双线性插值算法将红外图像进行扩展,若插值点(x,y)四周的已知点坐标分别为(x1,y1)、(x1,y2)、(x2,y1)、(x2,y2),则插值公式可表示为:
[0084][0085]
步骤1.4、根据实验标定的幅值和偏差,采用线性变换将插值后的红外焦平面阵列数据映射为灰度图像。最终可得到a
′×b′
的灰度图像ig:
[0086][0087]
其中,为便于后续的俯仰角检测,a
′
、b
′
需分别为红外焦平面阵列横向与纵向半视场角正切值的相同倍,即
[0088][0089]
其中,m为整数。
[0090]
步骤2、基于扩展红外图像的俯仰角解算:设计自适应双阈值对灰度图像进行二值化,突出纹理直线,采用hough变换算法实现纹理直线的检测与斜率计算,解算出弹丸俯仰角信息;
[0091]
将同一个红外焦平面阵列内两像素面元的δγ
ij1
、δγ
ij2
的正切值相减,可以得到:
[0092][0093]
因此,经过衰减系数矩阵处理后,若不考虑像素数的限制,同一红外焦平面传感器的两个像素面元(i1,j1)、(i2,j2)的输出可以相等,需满足下式:
[0094][0095]
换言之,经过衰减系数矩阵处理后输出相同的像素面元所在直线斜率k必满足下式:
[0096][0097]
根据上式,如果单轴红外焦平面阵列的像素数足够,则经过衰减系数矩阵处理后将存在输出相等的像素面元。弹丸的俯仰角便可由下式计算:
[0098][0099]
上述是理想情况下的弹丸俯仰角求解公式,但实际测量过程中,往往由于红外焦平面阵列像素数的限制或测量误差,难以直接找出经过衰减系数矩阵处理后输出相等的像素面元。因此可以借鉴图像处理算法,按阈值将红外焦平面阵列数据进行二值分割,通过检测边缘即看作经过衰减系数矩阵处理后输出相等的像素面元,用以解算弹体俯仰角。
[0100]
步骤2.1、根据上述理论分析,利用双线性插值后的红外灰度图像可直接进行俯仰角解算。首先根据灰度图像选择俯仰角解算自适应双阈值th1、th2:
[0101][0102]
其中,δth根据实际情况决定,在保证可覆盖一整条纹理直线的基础上尽可能减少像素点数。
[0103]
分别采用th1、th2进行图像二值化得到i
g1
、i
g2
,通过异或运算突出纹理直线:
[0104][0105]
步骤2.2、采用hough变换将图像变换到霍夫空间,找到在霍夫空间中的峰值点,即可计算得到通过图像二值化高亮突出的纹理直线斜率k,解算弹体俯仰角;
[0106]
步骤3、基于扩展红外图像序列的相对横滚角解算:设计自适应双阈值对相邻序列灰度图像进行二值化后,分别采用hough变换算法检测高亮直线并获取边缘坐标集。建立相邻序列灰度图像同一阈值的边缘坐标关系,最终解算出弹体相对横滚角,通过积分求和便可计算出弹丸的绝对横滚角;
[0107]
若取
[0108][0109]
δγ
ij
则可以进一步表示为:
[0110]
[0111]
也就是说,弹体横滚角方向上红外灰度图像中心线内的像素点输出与俯仰角无关。考虑到弹体俯仰角变化远小于横滚角,即相邻灰度序列图像的弹体俯仰角不变。利用上述特征,选取邻近灰度图像序列i
g1
、i
g2
中弹体横滚角中心线上的任意两像素点进行比较,如果有:
[0112][0113]
则两个像素点的灰度值相等,上式可以进一步表示为:
[0114][0115]
因此,相邻序列图像之间的弹体相对滚动角可由相邻序列图像中载体横滚角中心线上输出相同的像素坐标计算得到。与弹体俯仰角解算类似,由于红外焦平面阵列像素数的限制或测量误差,难以直接找出相邻序列图像中载体横滚角中心线上输出相同的像素面元。借鉴图像处算法,按阈值将红外焦平面阵列数据进行分割并提取在载体横滚角中心线上的边缘坐标,作为相邻序列图像中载体横滚角中心线上输出相同的像素面元,以进行相对横滚角的直接解算。
[0116]
步骤3.1、基于上述理论分析,相邻序列图像之间的相对滚动角可由相邻序列灰度图像中载体横滚角中心线上灰度值相同的像素的坐标计算得到。对相邻序列扩展灰度图像i
g1
、i
g2
进行处理,得到重叠灰度范围的上下限:
[0117][0118]
根据灰度范围上下限设置相对横滚角解算自适应双阈值th3、th4:
[0119][0120]
步骤3.2、利用双阈值对灰度图像i
g1
、i
g2
分别进行二值化得到i
g11
、i
g12
、i
g21
、i
g22
,通过异或运算高亮纹理直线:
[0121][0122]
采用hough变换将图像i
′
g1
、i
′
g2
变换到霍夫空间,找到在霍夫空间中的峰值点,即可分别得到通过图像二值化高亮突出的像素坐标集{(x1,y1)}、{(x2,y2)};
[0123]
步骤3.3、在实际检测过程中,存在如图4所示的四种情况。通过分析图像i
′
g1
、i
′
g2
中8连通区域的个数来分别得到边缘的个数num1、num2。从边缘像素坐标集{(x1,y1)}、{(x2,y2)}中提取弹丸横滚角中心线上的像素坐标{(x
′1,y
′1)}、{(x
′2,y
′2)}后,根据表1提取弹丸横滚角中心线上灰度值相同的像素坐标。
[0124]
表1横滚角解算关键坐标提取表
[0125][0126]
建立相邻序列灰度图像同一阈值的边缘坐标关系,弹丸相对横滚角可通过下式进行计算:
[0127][0128]
若需要求解绝对横滚角,可通过积分求和的方式获得,如下式所示:
[0129]
γ=∑γi。
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0130]
采用单轴红外焦平面阵列传感器布阵的姿态测量装置安装于三轴转台上进行半实物实验,按照本发明所述方法进行弹体俯仰角及相对横滚角的姿态解算。图5为采用本发明所述方法求解弹丸俯仰角与相对横滚角的误差曲线。从图5中可以看出,采用本发明所述方法进行旋转弹体姿态测量,俯仰角、相对横滚角的求解误差分别控制在
±
1.2
°
、
±
0.6
°
以内。
[0131]
上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1