一种磁控设备用磁场扫描装置及其扫描方法与流程
1.本发明属于磁控设备技术领域,更具体地说,是涉及一种磁控设备用磁场扫描装置。
背景技术:
2.现有磁场扫描仪只针对特定磁场强度,数据只能针对特定位置,不具有整体数据自主分析性;对磁极转换区域磁场没有针对性,该区域扫描数据较少且粗糙, 不能准确表达磁场分布;磁场扫描装置磁场扫描探头不具备归零校准,扫描数据偏差较大;磁场扫描装置磁场扫描探头不具有位置校准,对高精度要求的设备校准偏差不容易发现。
技术实现要素:
3.本发明所要解决的技术问题是:提供一种结构简单,能够有效解决磁场扫描仪三维磁场探头归零校准问题、解决磁场扫描仪三维磁场探头位置偏差问题、解决磁场强度数据分析不足问题,根据磁场扫描后的磁场强度参数,精确判断磁场均匀性的磁控设备用磁场扫描装置。
4.要解决以上所述的技术问题,本发明采取的技术方案为:
5.本发明为一种磁控设备用磁场扫描装置,包括装置本体、高斯计,所述的装置本体上设置左侧磁场固定台和右侧磁场固定台,左侧磁场固定台和右侧磁场固定台侧面设置x轴轨道,x轴轨道的x轴丝杆一端连接x轴伺服电机,x轴轨道的x轴丝杆上连接y轴轨道,y轴轨道上设置y轴丝杆,y轴丝杆上设置探头固定台,y轴轨道1的y轴丝杆一端连接y轴伺服电机,探头固定台上设置三维磁场探头,靠近x轴伺服电机位置设置永磁铁和消磁器。
6.所述的磁控设备用磁场扫描装置还包括磁场扫描标准件。
7.所述的x轴伺服电机和y轴伺服电机分别连接控制部件,高斯计分别连接高斯计电源和控制部件。
8.所述的控制部件控制x轴伺服电机转动时,x轴伺服电机设置为能够通过控制x轴丝杆转动而带动y轴轨道相对于x轴轨道沿着x轴移动的结构。
9.所述的控制部件控制y轴伺服电机转动时,y轴伺服电机设置为能够通过控制y轴丝杆转动而带动固定台相对于y轴轨道沿着y轴移动的结构。
10.所述的控制部件控制x轴伺服电机和y轴伺服电机转动时,控制部件设置为能够控制固定台上的三维磁场探头做出呈方形螺旋状的测量路径的结构。
11.所述的装置本体包括磁场扫描台和多个支撑腿。
12.所述的高斯计设置在磁场扫描台下方位置。
13.本发明还涉及一种步骤简单,能够有效解决磁场扫描仪三维磁场探头归零校准问题、解决磁场扫描仪三维磁场探头位置偏差问题、解决磁场强度数据分析不足问题,根据磁场扫描后的磁场强度参数,精确判断磁场均匀性的磁控设备用磁场扫描方法。
14.所述的磁控设备用磁场扫描方法的扫描步骤包括:
15.s1.三维磁场探头位置校准:磁场扫描仪进行磁场扫描前,对三维磁场探头位置进行校准,通过x轴伺服电机和y轴伺服电机将三维磁场探头移动至永磁铁上方,利用高斯计测量x轴和y轴,按照三维磁场探头的测量路径移动,将x 轴、y轴移动至永磁铁中心位置的正上方,即x轴、y轴磁场强度相同,将该点将作为坐标轴零点,通过高斯计测量z轴磁场,通过对比原来的标准值,校准探头的z轴方向的位置;这个标准值一般是设备安装调试时定的一个标准,普遍是用一根标准磁场棒/块作为基准,所有扫描仪以这个为基准。这个标准是客户根据自己产品确定的,和标准匹配的是ricipe即上限下限值,这个也是按自己产品设计的。我们这里是通过扫描10根样品,取平均值的上下一定波动范围作为标准范围。这个波动范围每个参数项有差异,有的
±
1%,有的
±
5%或其他。
16.s2.三维磁场探头位置校准后,扫描磁场标准件,扫描完成后,得到磁场标准件磁场参数,作为标准测量数值;
17.s3.完成标准件测量及三维磁场探头校准后,对待扫描的磁场进行测量,在被测量的磁场中,分别在x轴、y轴和z轴三个维度进行测量,测量面积覆盖整个被测平面;
18.s4.通过对被测磁场的扫描,得出实际测量数值,实际测量数值与标准测量数值进行对比,查看偏差范围是否在设定允许范围内,从而判断磁场设备是否出现偏差、是否出现磁场衰弱。
19.进行s3步骤时,查看磁场原点的参数,对比标准测量数值的范围,判断扫描平台固定支架安装是否有偏差,出现偏差则根据偏差量校准左右两侧平台固定支架位置;查看磁场左右磁场强度参数,对比标准测量数值的范围,判断扫描平台左右两侧水平位置是否有偏差,出现偏差则需要使用水平仪校准平台左右两侧水平;查看磁场前后磁场强度参数,对比标准测量数值的范围,判断扫描平台前后两侧水平位置是否有偏差,出现偏差则使用水平仪校准平台前后两侧水平。
20.采用本发明的技术方案,工作原理及有益效果如下所述:
21.本发明所述的磁控设备用磁场扫描装置,制作磁控设备用磁场扫描装置,控制部件控制x轴伺服电机转动时,x轴伺服电机能够通过控制x轴丝杆转动而带动y轴轨道相对于x轴轨道沿着x轴移动。控制部件控制y轴伺服电机转动时,y轴伺服电机设置为能够通过控制y轴丝杆转动而带动固定台相对于y轴轨道沿着y轴移动。这样,控制部件控制x轴伺服电机和y轴伺服电机转动时,控制部件能够控制固定台上的三维磁场探头做出呈方形螺旋状的测量路径,进行测量。磁控设备用磁场扫描方法的扫描时:三维磁场探头位置校准:磁场扫描仪进行磁场扫描前,对三维磁场探头位置进行校准,通过x轴伺服电机和y 轴伺服电机将三维磁场探头移动至永磁铁上方,利用高斯计测量x轴和y轴,按照三维磁场探头的测量路径移动,将x轴、y轴移动至永磁铁中心位置的正上方,即x轴、y轴磁场强度相同,将该点将作为坐标轴零点,通过高斯计测量z 轴磁场,通过对比原来的标准值,校准探头的z轴方向的位置;三维磁场探头位置校准后,扫描磁场标准件,扫描完成后,得到磁场标准件磁场参数,作为标准测量数值;完成标准件测量及三维磁场探头校准后,对待扫描的磁场进行测量,在被测量的磁场中,分别在x轴、y轴和z轴三个维度进行测量,测量面积覆盖整个被测平面;通过对被测磁场的扫描,得出实际测量数值,实际测量数值与标准测量数值进行对比,查看偏差范围是否在设定允许范围内,从而判断磁场设备是否出现偏差、是否出现磁场衰弱。本发明所述的磁控设备用磁场扫描装置,结构简单,步骤简单,能够有效解决磁场扫描
仪三维磁场探头归零校准问题、解决磁场扫描仪三维磁场探头位置偏差问题、解决磁场强度数据分析不足问题,最终能够根据磁场扫描后的磁场强度参数,精确判断磁场均匀性。
附图说明
22.下面对本说明书各附图所表达的内容及图中的标记作出简要的说明:
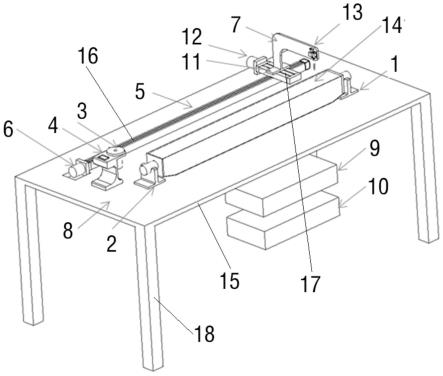
23.图1为本发明所述的磁控设备用磁场扫描装置的结构示意图;
24.图2为本发明所述的磁控设备用磁场扫描装置的测量路径的示意图;
25.附图中标记为:1、左侧磁场固定台;2、右侧磁场固定台;3、消磁器;4、永磁铁;5、x轴轨道;6、x轴伺服电机;7、探头固定台;8、磁场扫描台;9、高斯计;10、高斯计电源;11、y轴轨道;12、y轴伺服电机;13、三维磁场探头;14、磁场扫描标准件;15、装置本体;16、x轴丝杆;17、y轴丝杆;18、支撑腿;19、测量路径。
具体实施方式
26.下面对照附图,通过对实施例的描述,对本发明的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理等作进一步的详细说明:
27.如附图1、附图2所示,本发明为一种磁控设备用磁场扫描装置,包括装置本体15、高斯计9,所述的装置本体15上设置左侧磁场固定台1和右侧磁场固定台2,左侧磁场固定台1和右侧磁场固定台2侧面设置x轴轨道5,x轴轨道 5的x轴丝杆16一端连接x轴伺服电机6,x轴轨道5的x轴丝杆16上连接y 轴轨道11,y轴轨道11上设置y轴丝杆17,y轴丝杆17上设置探头固定台7, y轴轨道11的y轴丝杆17一端连接y轴伺服电机12,探头固定台7上设置三维磁场探头13,靠近x轴伺服电机6位置设置永磁铁4和消磁器3。所述的磁控设备用磁场扫描装置还包括磁场扫描标准件14。上述结构,针对现有技术中的不足,提出全新的技术方案。制作磁控设备用磁场扫描装置,控制部件控制x 轴伺服电机6转动时,x轴伺服电机6能够通过控制x轴丝杆16转动而带动y 轴轨道11相对于x轴轨道5沿着x轴移动。控制部件控制y轴伺服电机12转动时,y轴伺服电机12设置为能够通过控制y轴丝杆17转动而带动固定台7相对于y轴轨道11沿着y轴移动。这样,控制部件控制x轴伺服电机6和y轴伺服电机12转动时,控制部件能够控制固定台7上的三维磁场探头13做出呈方形螺旋状的测量路径。磁控设备用磁场扫描方法的扫描时:三维磁场探头13位置校准:磁场扫描仪进行磁场扫描前,对三维磁场探头13位置进行校准,通过 x轴伺服电机6和y轴伺服电机12将三维磁场探头13移动至永磁铁4上方,利用高斯计9测量x轴和y轴,按照三维磁场探头13的测量路径移动,将x轴、 y轴移动至永磁铁4中心位置的正上方,即x轴、y轴磁场强度相同,将该点将作为坐标轴零点,通过高斯计9测量z轴磁场,通过对比原来的标准值,校准探头的z轴方向的位置;三维磁场探头13位置校准后,扫描磁场标准件14,扫描完成后,得到磁场标准件磁场参数,作为标准测量数值;完成标准件测量及三维磁场探头13校准后,对待扫描的磁场进行测量,在被测量的磁场中,分别在x轴、y轴和z轴三个维度进行测量,测量面积覆盖整个被测平面;通过对被测磁场的扫描,得出实际测量数值,实际测量数值与标准测量数值进行对比,查看偏差范围是否在设定允许范围内,从而判断磁场设备是否出现偏差、是否出现磁场衰弱。本发明所述的磁控设备用磁场扫描装置,结构简单,步骤简单,能够有效解决磁场扫描仪三维磁场探头归
零校准问题、解决磁场扫描仪三维磁场探头位置偏差问题、解决磁场强度数据分析不足问题,最终能够根据磁场扫描后的磁场强度参数,精确判断磁场均匀性。
28.所述的x轴伺服电机6和y轴伺服电机12分别连接控制部件,高斯计9分别连接高斯计电源10和控制部件。所述的控制部件控制x轴伺服电机6转动时, x轴伺服电机6设置为能够通过控制x轴丝杆16转动而带动y轴轨道11相对于 x轴轨道5沿着x轴移动的结构。所述的控制部件控制y轴伺服电机12转动时, y轴伺服电机12设置为能够通过控制y轴丝杆17转动而带动固定台7相对于y 轴轨道11沿着y轴移动的结构。所述的控制部件控制x轴伺服电机6和y轴伺服电机12转动时,控制部件设置为能够控制固定台7上的三维磁场探头13做出呈方形螺旋状的测量路径的结构。上述结构,通过控制部件控制x轴伺服电机6和y轴伺服电机12转动,带动三维磁场探头13能够在x轴、y轴、z轴方向做三维运动,从而可以控制三维磁场探头13移动,并且能够按照附图2所示的路径移动,实现测量。
29.所述的装置本体1包括磁场扫描台8和多个支撑腿18。所述的高斯计9设置在磁场扫描台8下方位置。上述结构,磁场扫描台用于承载和固定各个部件。而需要获取标准测量数值时,磁场扫描标准件14一端支撑在左侧磁场固定台1 上,磁场扫描标准件14另一端支撑在右侧磁场固定台2,实现承载和固定。而对待扫描的磁场进行测量后,得到实际测量数值。将实际测量数值与标准测量数值进行对比,如果实际测量数值的参数在标准测量数值获得后设定的波动范围内,则表明实际测量数值满足要求,据此判断磁场设备没有出现偏差、没有出现磁场衰弱,否则,则判断磁场设备出现偏差、出现磁场衰弱。
30.本发明还涉及一种步骤简单,能够有效解决磁场扫描仪三维磁场探头归零校准问题、解决磁场扫描仪三维磁场探头位置偏差问题、解决磁场强度数据分析不足问题,根据磁场扫描后的磁场强度参数,精确判断磁场均匀性的磁控设备用磁场扫描方法。
31.所述的磁控设备用磁场扫描方法的扫描步骤包括:
32.s1.三维磁场探头13位置校准:磁场扫描仪进行磁场扫描前,对三维磁场探头13位置进行校准,通过x轴伺服电机6和y轴伺服电机12将三维磁场探头13移动至永磁铁4上方,利用高斯计9测量x轴和y轴,按照三维磁场探头 13的测量路径移动,将x轴、y轴移动至永磁铁4中心位置的正上方,即x轴、 y轴磁场强度相同,将该点将作为坐标轴零点,通过高斯计9测量z轴磁场,通过对比原来的标准值,校准探头的z轴方向的位置;这个标准值一般是设备安装调试时定的一个标准,普遍是用一根标准磁场棒/块作为基准,所有扫描仪以这个为基准。这个标准是客户根据自己产品确定的,和标准匹配的是ricipe即上限下限值,这个也是按自己产品设计的。我们这里是通过扫描10根样品,取平均值的上下一定波动范围作为标准范围。这个波动范围每个参数项有差异,有的
±
1%,有的
±
5%或其他。
33.s2.三维磁场探头13位置校准后,扫描磁场标准件14,扫描完成后,得到磁场标准件磁场参数,作为标准测量数值;
34.s3.完成标准件测量及三维磁场探头13校准后,对待扫描的磁场进行测量,在被测量的磁场中,分别在x轴、y轴和z轴三个维度进行测量,测量面积覆盖整个被测平面;
35.s4.通过对被测磁场的扫描,得出实际测量数值,实际测量数值与标准测量数值进行对比,查看偏差范围是否在设定允许范围内,从而判断磁场设备是否出现偏差、是否出现磁场衰弱。
36.进行s3步骤时,查看磁场原点的参数,对比标准测量数值的范围,判断扫描平台固
定支架安装是否有偏差,出现偏差则根据偏差量校准左右两侧平台固定支架位置;查看磁场左右磁场强度参数,对比标准测量数值的范围,判断扫描平台左右两侧水平位置是否有偏差,出现偏差则需要使用水平仪校准平台左右两侧水平;查看磁场前后磁场强度参数,对比标准测量数值的范围,判断扫描平台前后两侧水平位置是否有偏差,出现偏差则使用水平仪校准平台前后两侧水平。
37.本发明所述的技术中,对出现的术语进行解释如下:
38.磁场——磁场是一种看不见、摸不着的特殊物质,磁场不是由原子或分子组成的,但磁场是客观存在的。磁场具有波粒的辐射特性。磁体周围存在磁场,磁体间的相互作用就是以磁场作为媒介的,所以两磁体不用接触就能发生作用。
39.磁场扫描装置——可以对电磁铁或者永磁铁的磁场进行快速并高分辨率地测绘。
40.三维磁场探头——对磁场x、y、z坐标同时测量的磁场探测设备。
41.消磁器——消磁器(magnetic eraser),也叫退磁器。消除带磁物体上剩磁的一种设备称为消磁器。
42.永磁铁——永磁铁(permanent magnet),即永久性磁铁,可以是天然产物,又称天然磁石,也可以由人工制造(最强的磁铁是钕铁硼磁铁),具有宽磁滞回线、高矫顽力、高剩磁,一经磁化即能保持恒定磁性的材料。
43.伺服电机——伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
44.导轨——导轨(guide rail):金属或其它材料制成的槽或脊,可承受、固定、引导移动装置或设备并减少其摩擦的一种装置。
45.高斯计——高斯计,是测量物体于空间上一个点的静态或动态(交流)磁感应强度,由霍尔传感器(精度更高可选择磁通门传感器),经过物体磁力线穿过产生电流电压,主设备上面显示磁感应强度。
46.高斯——磁场强度单位机械。
47.坐标轴零点——用来定义一个坐标系的一组直线或一组线;位于坐标轴上的点的位置由一个坐标值所唯一确定,而其他的坐标轴上的点的位置由一个坐标值所唯一确定,而其他的坐标在此轴上的值是零。
48.avebxy——所测量的xyz三个轴的平均值。
49.integratedbxy——所测量的xyz三个轴的值之和。
50.devbxy——所测量的xyz三个轴的值的偏差。
51.本发明所述的技术中,几何属性:
52.1、原点:环形磁场扫描的起点。通过扫描参数得知右侧最大磁场点位置(磁场原点),判断磁场起点是否规范;
53.2、环形磁场长度。属性是长度的度量单位(英寸)从最左边的点到最右边的点。根据数据得知有效磁场范围是否符合磁场要求;
54.3、磁场平均宽度。针对环形磁场。对比磁场的平均值,检查磁场宽度是否出现位移;
55.4、磁场的最小宽度。针对环形磁场,根据扫描数据得知磁场的最小宽度是否在范围内,判断内部磁铁向内偏移量;
56.5、磁场最大宽度。针对环形磁场,根据扫描数据得知磁场的最大宽度是否在范围内,判断内部磁铁向外偏移量;
57.6、磁场周长。根据扫描数据磁场周长数据。
58.7、磁场强度倾斜。根据扫描数据得知磁场强度是否出现偏;
59.8、磁场的对称性,从左到右。根据扫描数据,校准磁场的左右的对称性,在校准的时候可以得知平台夹具左右倾斜量;
60.9、磁场的对称性,从前到后。根据扫描数据,校准磁场的前后的对称性,在校准的时候可以得知平台夹具前后倾斜量;
61.本发明所述的技术中,磁场强度属性:
62.1、avebxy=bxy波动的平均值(在均匀磁场范围,磁场强度x轴的波动情况)。avebxy属性是bxy峰值强度的平均值,位于环形磁场。这是确认磁包通过 /失败状态的关键测量。该值以高斯测量,对磁场强度非常敏感。
63.2、integratedbxy=在磁场圆周上整体的bxy值。这个积分bxy属性是整个赛道上bxy峰值强度的总和。用高斯测量。
64.3、avebxy(左侧)=磁场bxy波动的平均值,左侧。avebxy(l)属性是磁场左侧bxy峰值强度的平均值。(左侧离xy滑块最远。)该值以高斯测量。
65.3、avebxy(右侧)=磁场bxy波动的平均值,右侧。avebxy(r)属性是磁场右侧磁场bxy峰值强度的平均值。(右侧最靠近xy滑块。)该值以高斯测量;
66.4、avebxy(顶部)=磁场顶端bxy波动的平均值。avebxy(top)属性是磁场顶部(从顶部左右两侧)的bxy峰值强度的平均值。该值以高斯测量,对磁场也很敏感。
67.5、avebxy(底部)=磁场底端bxy波动的平均值。avebxy(bot)属性是磁场底部(从底部到右侧的左侧)的bxy峰值强度的平均值。该值以高斯测量,对磁场也很敏感。
68.6、devbxy=内部bxy幅度的标准偏差。devbxy属性是磁场两侧与内侧bxy 峰值强度的标准偏差。它是从平均值(avebxy)测量bxy强度的变异性。该值以高斯测量。
69.7、devbxy(l-r)=从左到右的偏差(bxy幅度)。devbxy(l-r)属性是从磁场左侧到右侧的平均bxy峰值强度的差异。该值的测量单位为高斯。
70.8、devbxy(c-e)=bxy幅度从中心区域到末端的偏差。devbxy(c-e)是磁场两侧的bxy峰值强度平均值与磁场顶部和底部bxy峰值强度平均值之间的差值。该值以高斯测量。
71.9、devbxy(e-e)=bxy值从顶端到底端的偏差。devbxy(ee)是磁场顶部 bxy峰值强度的平均值与磁场底部bxy峰值强度的平均值之间的差值。
72.通过扫描标准件,得出相应的磁场范围及偏差范围;设置以上参数,当以上任意参数超过设定范围,此磁场件需注意。
73.本发明所述的磁控设备用磁场扫描装置,制作磁控设备用磁场扫描装置,控制部件控制x轴伺服电机转动时,x轴伺服电机能够通过控制x轴丝杆转动而带动y轴轨道相对于x轴轨道沿着x轴移动。控制部件控制y轴伺服电机转动时,y轴伺服电机设置为能够通过控制y轴丝杆转动而带动固定台相对于y轴轨道沿着y轴移动。这样,控制部件控制x轴伺服电机和y轴伺服电机转动时,控制部件能够控制固定台上的三维磁场探头做出呈方形螺旋状的测量路径,进行测量。磁控设备用磁场扫描方法的扫描时:三维磁场探头位置校准:磁场扫描仪进行磁场扫描前,对三维磁场探头位置进行校准,通过x轴伺服电机和y 轴伺服电机
将三维磁场探头移动至永磁铁上方,利用高斯计测量x轴和y轴,按照三维磁场探头的测量路径移动,将x轴、y轴移动至永磁铁中心位置的正上方,即x轴、y轴磁场强度相同,将该点将作为坐标轴零点,通过高斯计测量z 轴磁场,通过对比原来的标准值,校准探头的z轴方向的位置;三维磁场探头位置校准后,扫描磁场标准件,扫描完成后,得到磁场标准件磁场参数,作为标准测量数值;完成标准件测量及三维磁场探头校准后,对待扫描的磁场进行测量,在被测量的磁场中,分别在x轴、y轴和z轴三个维度进行测量,测量面积覆盖整个被测平面;通过对被测磁场的扫描,得出实际测量数值,实际测量数值与标准测量数值进行对比,查看偏差范围是否在设定允许范围内,从而判断磁场设备是否出现偏差、是否出现磁场衰弱。本发明所述的磁控设备用磁场扫描装置,结构简单,步骤简单,能够有效解决磁场扫描仪三维磁场探头归零校准问题、解决磁场扫描仪三维磁场探头位置偏差问题、解决磁场强度数据分析不足问题,最终能够根据磁场扫描后的磁场强度参数,精确判断磁场均匀性。
74.上面结合附图对本发明进行了示例性的描述,显然本发明具体的实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种改进,或未经改进将本发明的构思和技术方案直接应用于其他场合的,均在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1