检测高压输气管道中液体的存在的制作方法
1.本发明涉及一种使用具有视镜或玻璃装置的光学技术来检测高压输气管道中液体的存在的装置和方法。
背景技术:
2.高压输气管道用于输送天然气。有时液体可能存在于气体体积中,并且可能随气体一起沿着管道输送。通常,气体管道中的液体的存在是不希望的,因此有利的是能够检测液体的存在,并且优选地监测管道中存在多少液体(体积)以及通过管道的液体的流速(体积流速)。先前已尝试确定低含量的液体,但是使用诸如声波和超声波、微波、飞行时间距离测量系统和激光三角测量的技术对于许多系统造成了特殊的问题。
3.对管道中液体的检测对于表征高速和低速颗粒和液体流动都有复杂的要求。因此需要各种技术来全面表征当液体存在时液体流动的情况。例如,高压气体系统中的光学系统需要在管道中具有与高压接触的主要光学部件(视镜或多个视镜)。在气体管线中的光学部件存在已经在申请人以前的专利申请中解决的两个问题。具体来说,其描述了具有外壳安全壳的视镜,以及确定在管壁上的液体深度的三角测量系统。虽然这在高压容器和管道中的低速气流中工作良好,但当液体存在于高速气流中时,液滴被气体拾取并向前抛出,从而使得当液滴通过视野时,使用飞行时间系统的基于激光的三角测量或光学测距系统易受高水平的噪音影响。气流中气溶胶的存在类似地导致高噪音水平。
4.一些管道检测系统在管道中使用安装在清管器或小型车辆上的成像系统,以检查内部管壁用于检测管道中的缺陷焊缝、腐蚀和其他缺陷。
5.本发明的实施方式寻求解决与检测气体管道中的液体相关的一些问题。
技术实现要素:
6.根据本发明的一个方面,提供了一种用于检测高压输气管道中的液体的存在的装置,包括:
7.视镜或多个视镜,其在管道内提供孔;
8.一个或多个光源
9.光传感器,用于通过视镜接收和感测来自管道内部的反射光;和
10.处理器,用于基于感测的反射光自动检测液体的存在。
11.以这种方式,基于反射光的测量可以实现气体管道中液体的存在的自动检测,当存在液体时与不存在液体时相比,可以预期反射光的不同。不需要操作者的视觉检查-虽然用户可能需要的任何相关的过程数据可以被存储以供以后的操作者使用或者如果需要的话用于实时验证。因此,该系统能够确定管道内高压气流中低液体水平的液体流量。
12.在一些实施方式中,可以自动检测管道内的液体的不同流动状态。先前提出的技术中没有一个能够在低液体水平下识别不同的流动状态。相信使用视觉成像技术在低液体体积分数(lvf)方面比其他技术更好地工作,因为这是其他技术如超声波或微波需要非常
高的灵敏度的地方。
13.一般而言,本技术涉及具有90%的气体体积分数(gvf)或更高,且液体体积分数(lvf)为10%或更低的高压输气管道。当气体在管道中流动时,通常由在管道系统的入口点和出口点之间的压力差引起。气体管道中湿气流中存在的液体的确定存在特定的问题。当低含量的液体夹带在气流中时,高比例的该液体撞击管壁并留在壁上。它沿着管壁移动,并且由于与气相的摩擦而引起流动。在水平管道中,在液体流量水平较低的情况下,液体通常在管壁上形成薄膜(在重力作用下)沉入管道底部。在较小直径的管道和较高的压力下,在气流中有足够的能量的情况下,膜可以在管道的整个圆周上形成环形流动。在较大直径的管道中,或者在较低的流速下,膜可能沉到管道的底部并形成缓慢移动的稳定流(光滑的分层流动)。如果液体含量增加,则液流可能开始“波状流动”:当管道底部的液体深度足够时,液流表面上就会出现快速移动波。如果液体流量进一步增加,则会出现“活塞流”,然后是“气泡流”状态。
14.存在复杂的流态和模式,其由于许多不同的因素而变化,例如:液体流速、气体流速、气体压力、气体密度、液体密度、液体粘度、管道直径和温度等。在液体流量较低的情况下,气体的速度与管壁上的液膜或液流的速度有很大的差别。
15.任何检测和测量这些流量的系统都需要非常敏感。管道中存在液滴和气溶胶,并且高速行驶会在流量或液体深度测量系统中产生噪音。
16.本装置和方法监测液体流量并自动确定在高压管道系统中在低液体流量水平下不同液体流动状态的开始。这些管道的直径范围可以从2”到48”或更大。本装置产生的数据可以用来确定体积液体流量,也可以由流量计算系统使用来提高其他气体流量测量设备的精度。
17.该装置还可以确定气流中夹带的液滴以及较小的气溶胶的大小、体积和速度,从而能够估计湿气体系统中的总液体流量。该装置可以用来警告操作者在来自例如气体/液体分离器的正常干燥的气流中的携带液体过量,或者用于表征和测量湿气流中的液体。
18.使用照明、成像或光检测系统检测和表征管道中的低液体含量的气流和湿气流的系统,可以确定在高压管道内的液体流动。可以测量液体的体积和液体表面的速度。通过测量液体流的速度和尺寸来表征存在于管壁处的液体或夹带在气体流中的液体以及气溶胶形式的液体可以计算总液体流量。还可以使用算法来建立管壁上的三维液体流量的估计,以基于管道表面上的液体表面上的速度来计算总流量。
19.在管或容器包含高压可燃气体和/或天然气时使得更多有创技术是危险的并因此是不可行的情况下,本发明的实施方式可以是特别有益的。
附图说明
20.现在将参考以下附图通过举例来描述本发明,其中:
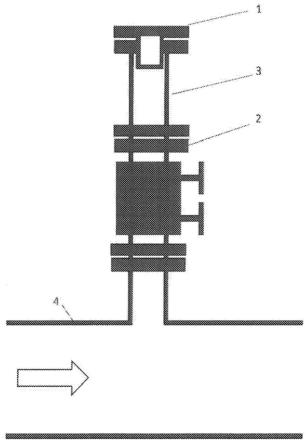
21.图1示意性地示出安装到从水平气体管道垂直分支的侧管道的液体检测系统;
22.图2示意性地示出安装到与水平气体管道成角度地分支的侧管道的液体检测系统;
23.图3示意性地示出安装到与垂直气体管道成角度地分支的侧管道的液体检测系统;
24.图4示意性地示出使用从光检测轴偏移的光源的液体检测系统;
25.图5示意性地示出了具有照明装置的液体检测系统,该照明装置将光投射到光检测器的视野之外的区域中,以便检测存在于气体管道中的气溶胶或热霾;
26.图6示意性地示出使用多个光源来将光投射到光检测器的视野之外;
27.图7示意性地示出了分布式流动状态的示例图像;
28.图8示意性地示出了珠状流动状态的示例图像。
29.图9示意性地示出了平滑分层流动状态的示例图像;
30.图10示意性地示出了分层波浪流动状态的示例图像;
31.图11示意性地示出了部分环形流动状态的示例图像;
32.图12示意性地示出了全环流动状态的示例图像;
33.图13示意性地示出了横跨光滑分层流的宽度的流量分布的示例图像和
34.图14示意性地示出了液体检测系统。
具体实施方式
35.首先参考图1,其示出了光学系统1的示例,光学系统1安装在视镜或视镜2后面的与管道4中的主流相距足够距离(0.2米或以上)以使视镜保持大部分不受可能存在于主流体流中的污染物的污染。视镜用于向通常处于高压下的管道的内部提供窗口。光学系统1通过该窗口观察输气管道的内部。尤其是视镜2设置在从主管道4分支出来的侧管道3的端部。在水平管道系统中,侧管道通常在主管道上方,或者直接位于主管道的上方或者与之向上成角度。然而,原则上,侧管道可以设置在主管的一侧或另一侧,或者甚至在其下方—尽管这样的实施方式可能由于重力对沿主管道传送的液体的影响而增加液体对视镜的污染。如图2所示,光学系统1也可以与主管道4成角度地安装(例如,侧管道可以与主管道成角度,例如30
°
或45
°
),由此,给光学系统提供更大的视野。具体地,可以看出,图2中的视野fov2大于图1中的视野fov1。在此上下文中,将理解,术语“视野”旨在表示光学装置能够看到的管线的一部分(的尺寸)。作为更大视野的结果,光学系统能够在更大的“样本”信息上操作。另一方面,图2的实施方式将需要更复杂的图像处理,以补偿由角度引起的图像的几何失真,并且另外,从气体管道的内部反射回来的光量(从设置为光学系统1的一部分的光源)可能较低,其中该光成角度撞击管道/液体表面而不是垂直地撞击。优选地,如图2中的方向箭头所示,侧管道3从主管道中的流体流动方向向后突出,以避免(或者至少减少可能的)流体中的液体被驱动到侧管道3。图3示出了包括主管道4、光学系统1、视镜2和侧管道3的垂直管道系统。与图2一样,侧管道可以是与主管道成角度的,例如30
°
或者45
°
,或者如图1所示可以是垂直的。垂直管道中的气流可以在任一方向上。
36.光学系统
37.在最简单的情况下,简单的光源可以将光向下沿着侧管道3投射到主管道4中,而简单的光检测器检测反射光的水平。在没有液体流入管道的情况下,反射光的水平可以预期为相对一致。在液体沿管道向下输送并通过侧管道口的情况下,反射光的水平可以预期变化更大(由于当光被投射到移动的液体上时通常实现的“闪烁”效果)。因此,变化量可以表示管道中存在液体或存在于管道中的液体的量。如果变化超过阈值,则可以确定气体管道中存在液体或者气体管道中存在过多的液体。在有限的程度上,可以基于在光探测器处
接收到的光水平的变化来确定可能的流动状态。而且,通常(但不总是)液体的存在可能改变反射光的平均水平。例如,取决于液体与管道内壁的反射特性相比较的反射特性。类似地,因此,光照水平本身(在多个样本上平均)可以用作液体存在的指示,并且在需要自动检测液体的情况下,可以将光照水平与阈值进行比较以确定何时在输气管道中存在太多的液体。
38.然而,如果使用诸如照相机的成像装置或者简单的光探测器,则可以提供对气体管道内的液体流动更可靠的估计。图像处理技术既可以用来检测管道内的液体流动状态,也可以用来产生管道内的液体体积和体积流速的估计,其计算可能受到流态的影响。此外,如下所述,可以通过使用更先进的光源来实现改进的操作(或者在光检测器或者成像装置的情况下)。
39.光学系统1包括照明系统,该照明系统可以是单色的,或取决于被监测的流体的性质和被测流体的特性而在包括可见光、ir、uv和太赫频率的多个波长处操作。如果接收光学系统能够过滤出特定的波长,则以不同波长工作的多个光源的操作允许同时使用各种技术,以允许突出和测量流态的不同方面。除了波长之外,照明源可以产生一个光束,或者成形光束和聚焦光束的组合,例如点、线、格栅或其他图案,以便帮助识别和测量不同的流动状态。特别地,通过将照明图案投射到气体管道中,该图案可能由于气体管道内的液体的存在而变形,并且可以在所捕获的图像中检测到这种失真(通过将照明图案在捕获的图像中的位置与管道没有任何液体时其预期位置相比较)并且用于推断液体的存在以及流动类型。例如,气体管道的内壁通常是弯曲的,而沿着气体管道底部流动的液体流可以预期在低液体流速下具有相对平坦的表面。这样的流的平坦表面可以基于照明图案的失真来检测。
40.准直和非准直光的使用可以帮助区分液体流中的特征。非准直光可以用于确定流的边缘,可能使用准直的光来确定液体流的宽度上的液体的速度或相对速度。多普勒散斑对比成像是一种可用于此过程的技术。横跨流动的速度曲线的确定导致更精确地确定流量,并且由于液体仅在气体的影响下移动,所以可以从液体速度数据确定液体-气体分数。速度的相对确定在图13中示出,其中测量液体流10的流体速度15。
41.虽然照明源可以与照相机共线,但是如图4所示,通过使照明源5(此处为光纤、透镜6和反射镜5b)与光学系统1偏移,可以获得一些优点,从而创建阴影和流动液体上的更好的对比。照明源5也可以由防护屏障5a保护。偏振光和偏光镜片的使用可以确定液体的存在,因为从液体表面反射的光将改变其极性。当偏光镜片与入射光线成正确的角度时,只有从液体反射的光线能够被观察到,并且减少了当与一个或多个相机或成像系统一起使用时可能干扰图像分析的反射。
42.在光学系统中使用液体或膜型透镜可能是优选的。液体或膜型透镜的使用在小型化、可靠性和高风险区域的安全操作方面具有许多优点。此外,它可以用来在短时间内改变镜头的焦距,从而快速生成景深扫描。在这样的实施方式中,液体或膜型透镜可以用来确定和分类跨过管道直径的位置处的气溶胶体积,以提供气溶胶颗粒分布的更全面的图像。
43.照明系统5也可以用于突出悬浮在气流中的气溶胶和液滴。当从正上方观察时,这可以通过将环或多个线投影并聚焦在视野外(从观察点)来实现。这具有避免管壁上的液体反射的光干扰从液滴和气溶胶反射的光的优点。图5示出了利用照明源5设置的光环以及将光环聚焦到系统3的垂直部分内的点7的透镜或类似物6,从而将光环投影到视野外侧的管
壁上(当从上面被查看时)。如安装其它光学部件时可能需要的那样,可以使用反光镜、分束器和其他光学部件来折叠或组合光路。图6示出了可以使用两个(或更多)光源来投影点、线或其他形状以使得它们被投影到成像装置的视野之外的替代方案。如上所述,预期的照明图案可以被液流(扁平区域)、液流中的隆起(液体的脉冲/液流的隆起或更宽的区域)、环形等等而变形。
44.当气体速度很高时,例如每秒10米,这等于每毫秒10毫米,因此为了获得高速的液滴和粒子的清晰图像,照相机必须以高速帧频连续光照工作。这产生了大量的用于分析的图像。另一种优选的系统是以较低的帧频操作照相机,并使照明系统在每一帧内以高速(多次)调制(或闪光)。照明系统可以设置为每帧闪光一次。但是,当照明在一帧内闪烁两次或三次时,可以分析每帧以确定帧内和帧之间的粒子和液滴的速度。特别是,如果照明系统在一帧内多次闪烁,则特定的液滴(例如)可能在一帧内多次出现,因为它穿过成像装置的视野。帧内每个液滴之间的距离指示该液滴的速度。
45.管壁上的气体和液体以非常不同的速度行进,并且使用多个照明和图像捕获系统允许该系统确定悬浮在气相中的高速颗粒和在管壁上或在液流的表面上移动的慢速液体和颗粒。
46.成像系统
47.光学系统被设计为建立主管道4的全部可用视野的图像,使得图像分析可以确定总液体流量的特性。可以使用图像处理来确定图像中的固定点(例如侧管道的口)的尺寸以实现图像中其他感兴趣项目的比率测量。如果存在液体,则当气体流量高于液体流量时,可以使用图像处理来确定存在以下哪种液体流动类型。
48.使用图像处理技术可以来区分不同的流动状态。考虑的主要流动状态是分散流、珠状流、光滑分层流、分层波浪流、环状流(全部或部分)、活塞流和气泡流。下面根据它们的特征描述这些流态中的每一个。此外,还描述了可用于识别和区分这些不同流动状态的图像特征。
49.分散流
50.非常低的流体流速会使得气流中产生的液滴落在管壁上。这些液滴可以通过成像系统观察到。图7示出沿液滴分散流的垂直截面3拍摄的图像。垂直部分8的下限的直径将是已知的,并且可以用作固定参考。在照明良好的成像系统中,液滴的外观可以通过基于计算机的图像处理系统来突出显示以识别存在分散流,其然后激活测量系统以确定每个液滴的直径。可以估计液体总面积和体积来计算液体滞留量。可以估计液滴尺寸和数量随时间增加(或减少)的速率(作为液体流速的指标)并报告。
51.珠状流
52.在分散流中(见图8),液滴是静止的和分离的。相反,在珠状流中,单独的液滴100倾向于聚集在一起并沿管壁沿气体流动方向(并且在气流的影响下)移动。同样,珠状流的液体流量水平非常低。与分散流一样,可以评估每个液滴的直径,并且可以估计在给定时间的总液体面积和体积。液滴沿管壁移动的速率也可用于估计液体流速。应该认识到,流态可以是分散流和珠状流的组合—即一些液滴按照分散流出现在壁上,而其他液滴聚集在一起和/或沿壁移动。在这种情况下,液体体积和流量可以从液滴尺寸和数量增加的速率和液滴沿着管壁移动的速率的组合来确定。
53.分层光滑流
54.在这里,在管道底部存在稳定的液体流,在表面处几乎没有湍流。在这种流态,气体流动和液体流动之间有很大的差别或“滑动”。图9显示了分层光滑流。图像处理系统能够通过液体和管壁之间的对比来区分流体的边缘。图像处理系统能够例如使用固定点(例如侧管道3的口)作为参考来识别流体的平均宽度。当主管道4的直径已知时,可以从宽度测量中计算液体流深度和面积以估计液体滞留。当在液体流动的表面上观察到气泡或颗粒时,如果照明系统以高于帧频的频率被调制,则液体流的速度可以通过多帧或在一帧内的图像分析来确定。或者,当使用激光照射时,可以使用多普勒散斑对比度来确定通过视野的液体的流量。在流体中间的流体移动比在边缘的流体更快的情况下,可以确定液体流的表面周围的流动曲线。一旦计算出来,二维流动曲线可以应用于管道底面上的液体流的三维流动,并且可以估计流体的总液体流动速率。
55.对于光滑分层流,可以通过参考相对于流体的宽度的图像中的已知固定点(例如垂直管道的直径)并根据管道的已知直径应用几何形状来建立流动宽度。一旦宽度已经确定,可以计算深度和面积以确定液体滞留量,或者与气体体积相比的液体体积。
56.另外,可以通过分析照明的调制之间或者在帧之间的粒子位置偏移来确定流体的表面上的流量分布。
57.一旦建立了表面速度曲线,就可以将其应用于三维流动来估计液体流的总体积流量。这样的优点在于使用随气体流量、液体密度和液体粘度而变化的实际流量曲线。
58.分层波浪流
59.当管底上的液体深度和与气体的摩擦力足够时,脉动或波浪随着液流沿着管壁高速移动。图10显示了波状流动状态。液体的波动12在液体流的表面上行进,暂时增加液体流的宽度(和深度)。一旦被成像系统识别,除了宽度测量之外,还可以使用脉冲大小、频率和持续时间来确定液体滞留和液体流动。
60.环流
61.在足够的液体流动并且气流中有足够的能量的情况下,液体可以被保持在管壁上,如图11所示。在这种情况下,流体的边缘在成像装置的视野之外,因此不能被观察和用于确定液体体积和流速。然而,可以使用流动曲线的可见部分(流体宽度上的液体流动速度的差异)来估计流体的宽度,或者直接估计液体体积和流量。流动曲线可以用来确定在整个流体的宽度上的深度变化。虽然这些流动可能超过视野,但深度可以通过测量底部的流动曲线以及视野中的一个或多个其他点来确定。
62.可以使用短程扫描lidar系统来确定穿过视野的液体的深度。在此,与液体流成一定角度的相干照明源可以将线投射到管道的底部。当液体进入管道时,所述线的移动可以用来确定液体流的深度。由于液体流动之上的气体折射率的变化,这种技术在压力下通常是不准确的。然而,通过在视野中扫描,固定的参考点可以用于补偿这个问题以及测量漂移和任何“热霾”、海市蜃楼或其他折射效应的存在。
63.可替代地,液体表面上的高频波纹可以被图像处理系统识别和使用,以帮助确定流过视野的流动形态类型和流量。
64.完全的环状流
65.在较小直径的管道中,气体中可能有足够的能量,并且存在足够的液体来涂覆管
壁的整个直径。在图12中可以看到在这种流态下可见的液体表面的一个实施例。低密度液体可能趋向于完整的环状流。这可以由视野内的不同流动曲线来确定。特别是,对于部分环状流,横跨捕获图像的液体流动速度的变化将大于完全环状流。多普勒散斑对比和短程扫描lidar可用于确定或帮助确定流态和流量。这可以从图11和图12的比较中理解。
66.活塞流
67.在较高的液体流量下,液流中的波浪足够高以覆盖管道的整个直径,因此被沿管道高速推进。这些可以通过当活塞流通过时液体升高垂直截面确定。这在捕获的图像中清晰可见。该特征可以通过多种方式自动检测。例如,当液体升高竖直截面时,侧管道3的口部的明显边缘将变得模糊不清。或者,投影到气体管道中的照明图案在每次水升高垂直截面时将基本失真。
68.气泡流
69.在更高的液体流量下,气相在液体内变成气泡。对于透明液体,可以通过分析图像来估计气体体积。利用上述流动状态,可以分析照明时间已知和受控的连续图像或帧,并且可以在流体的宽度上的多个点处确定液体的速度。在更高的液体流量水平下,也可以确定气泡的速度以指示和识别流动状态和流量。
70.气溶胶
71.如果以不同波长工作的照明系统的一部分被布置成使得成形的光束投射到视野之外的管壁上或是感兴趣的区域,则其消除了从管底反射的光(或管道底部的液体)将干扰反射光的功率和测量气流中的气溶胶的可能性。这将允许确定气体是否相对于水蒸汽或碳氢化合物饱和,并因此处于(或高于)其露点温度;也可以计算气流中气溶胶含量的指示。所述气溶胶可以是液体、固体或水合物。另外,可以使用lidar系统来测量管道的气溶胶含量。由于这种透镜的快速聚焦特性,这种lidar系统可以使用至少一个液体或膜透镜。第二个液体透镜可以安装在相机上,以便进行快速景深扫描。
72.热霾
73.根据定义,高压输气管道具有比大气压力下的气体密度更高的气体。由于温度的密度变化在高压下更显着,并且热霾发生在与大气压力的温度差较低时。通过对包括固定项目(例如图4中的项目8)的完整视野成像,可以识别并校正热霾用于图像处理。这是因为固定项目会因热霾的存在而出现移动,并且可以使用这种情况的发生和移动量来识别热霾的存在并确定由该热霾引起的变形量。当光源是成形点、线或线、网格或点阵时,这也可以帮助识别、测量和校正收集的图像上的热霾效应。这是因为投影的点、线、网格或矩阵将在图像帧内从其预期位置变形(移位),表明存在热霾。而且,变形量表示热霾量。基于热霾的检测,图像处理算法可以适应于补偿热霾。例如,如果点、线条或网格的图案相对于其预期的形状失真,则可以对图像应用逆几何失真进行补偿。
74.尽管对于大多数测量设想了一个照相机,但是可以通过改变帧之间的照明技术或者当多于一个照相机与例如偏振光系统一起使用来实现图像比对或图像相减。
75.为了产生液体的报警和测量,可以实时或接近实时地实现图像分析。或者,可以在数据保存后分析图像。
76.元数据
77.高压输气管道内的管道活动图像可以现场传送给操作人员,或者保存以便日后检
查。图像可以与其他数据重叠或关联。过程和其他数据可以被添加到图像以使其能够被用作特定时间或日期的特定管线的证据。在处理过程中,时间、日期、位置、温度、压力气体流量、液体流量和其他相关数据可以被添加到图像中,以允许工程师或其他相关人员容易查看以提供过程控制决策的数据或不适当液体流量的证据。在天然气工业中,天然气购买者可能希望能够拒绝其性质是不可接受的天然气。例如,如果买方正在支付干天然气的供应,那么在供气管道内存在大量液体可能是不可接受的,并且据此拒绝交货或补偿。通过存储元数据或将元数据与图像进行关联,可获得支持这一点的证据。
78.图14示出了使用多个光源的系统。一个或多个光源可以用来从不同的角度和/或波长照射视野,或视野的一部分。一个或多个照相机或检测器可用于收集数据和图像。成像控制器可以改变相机系统的帧频,以及照明系统的调制频率从连续调制到高频调制。图像处理系统将分析帧或图像以确定流动状态,并从图像中进行适当的测量以确定流动的特性,例如液体含量、液体宽度、液体深度、液体面积、液体滞留量、流态和流量。
79.通过查看管道活动以及提供关键参数的测量结果,操作员可以了解(并相信)报警系统报告的内容。由于许多不同的变量,不同的流态发生变化。了解流动状态很重要,因为它会改变所需的测量类型以定义流速。这也是液体流量不同水平的指标。
80.对管壁和气溶胶中的液体的组合测量意味着可以对总液体流量进行更好的估计。
81.一种照明和成像系统,用于自动确定高压气体管道内液体的存在并量化其体积和流量。该系统可以自动测量流体流内的不同液体流动状态。各种准直和偏振光源的调制照明可帮助识别和测量流体流动。
82.大直径管道内液体流动的流态取决于许多因素,并且难以通过计算流体动力学建模(cfd)来准确确定。目前大多数测试流量回路是2”或3”或不常见8英寸直径的管道,并且建模用于确定较大直径管道内以及具有不同密度和粘度的液体的流动状态。这些模型在12”直径的管道和更大的直径的管道的准确性是可疑的。由该系统产生的可视数据的使用可以量化液体流量,并且可以用于帮助cfd模型,或者由操作者、天然气购买者和销售者使用以确定贸易交接点处的流体的质量以建立其安全性以及它是否适合进入管道网络。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1