一种基于人工智能的病理辅助诊断系统及其使用方法与流程
1.本发明涉及医疗器械技术领域,尤其涉及一种基于人工智能的病理辅助诊断系统及其使用方法。
背景技术:
2.随着科技的发展,人工智能也在飞速进步,人工智能,英文缩写为ai,它是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学;其应用范围十分广泛,其中就涉及到了医疗方向,在医疗方向上的应用往往都是用于病理的辅助诊断系统。
3.医疗图像分析仪是一种常见的影像学辅助诊断仪器,主要用于医学病理切片的观察,配合计算机上加载的人工智能辅助诊断软件系统,便于医护人员作出诊断。
4.但是目前的医疗图像分析仪大多为普通结构设计,无法折叠收纳,存放空间较大;且在加装病理切片时,一般是直接将病理切片放置在工作台上,若病理切片未能与图形分析仪位置对齐,则不能够对病理切片进行全局分析,影响分析结果的准确性;若需要人为地将病理切片与图像分析仪位置对齐,需要医生多次调整切片或分析仪位置,使得操作步骤繁琐,影响医生的诊断效率;同时病理切片在观察时,外侧有时会粘附灰尘,若不及时对灰尘进行清理,同样会影响分析结果的准确性。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的问题,而提出的一种基于人工智能的病理辅助诊断系统及其使用方法。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种基于人工智能的病理辅助诊断系统,包括底座及病理切片,所述病理切片放置在底座上,所述底座上设置有可调节支撑座,所述可调节支撑座的顶部设置有安装板,所述安装板远离可调节支撑座的一端连接有分析仪,所述底座上还设置有用于病理切片定位的夹持机构以及受夹持机构驱动用于清理病理切片的除尘机构,所述夹持机构包括第一夹持组件以及设置在第一夹持组件上的第二夹持组件,且所述可调节支撑座通过传动组件驱动夹持机构对病理切片夹持定位。
8.优选的,所述第一夹持组件包括两个丝杆,每个所述丝杆的两端均设置有第一固定座,所述第一固定座与底座固定相连,所述丝杆的两端分别螺纹连接有第一套筒和第二套筒,所述第一套筒和第二套筒上均固设有移动板,所述移动板上设置有第一弹性元件,所述第一弹性元件远离移动板的一端连接有第一夹板。
9.优选的,所述第二夹持组件包括通过销轴与第一套筒转动相连的第一连板以及通过销轴与第二套筒转动相连的第二连板,所述第一连板远离第一套筒的一端以及第二连板远离第二套筒的一端铰接有同一个活动板,所述活动板滑动连接在底座上,所述活动板上设置有第二弹性元件,所述第二弹性元件远离活动板的一端连接有第二夹板。
10.优选的,所述活动板的底部设置有滑块,所述底座上开设有与滑块相配合的滑槽。
11.优选的,所述可调节支撑座包括通过轴承转动连接在底座上的套管,所述套管上设置有旋钮,所述套管内螺纹连接有螺杆,所述螺杆与底座之间设置有伸缩杆,所述螺杆远离伸缩杆的一端与安装板固定相连。
12.优选的,所述传动组件包括固设在底座上的第二固定座,所述第二固定座上转动连接有转动杆,所述转动杆上设置有从动锥齿轮,所述套管上设置有与从动锥齿轮啮合的主动锥齿轮,所述传动组件还包括固设在丝杆和转动杆上的同步轮,两个所述同步轮之间设置有皮带。
13.优选的,所述除尘机构包括固设在底座上的连接板,所述连接板上设置有工作箱,所述工作箱开设有进气口和出气口,所述进气口上连通有第一气管,所述第一气管远离进气口的一端连接有第一气体调节箱,所述第一气体调节箱设置在活动板上,所述出气口上连接有出气管,所述出气管远离出气口的一端连接有除尘板,所述除尘板内设置有密闭腔体,所述除尘板上开设有与密闭腔体相互连通的出气孔。
14.优选的,所述除尘机构还包括开设在工作箱内的活动槽,所述活动槽上连接有第二气管,所述第二气管远离活动槽的一端连接有第二气体调节箱,所述第二气体调节箱设置在移动板上,所述活动槽内壁滑动连接有第一塞板,所述第一塞板与活动槽内壁之间设置有第三弹性元件,所述第一塞板远离第三弹性元件的一端连接有挡板,所述挡板的底部穿过活动槽并向其外部延伸,所述挡板上开设有与与出气口相配合的凹孔,所述工作箱内壁滑动连接有第二塞板,所述第二塞板与工作箱的内壁之间设置有第四弹性元件。
15.优选的,所述第一气体调节箱和第二气体调节箱均包括外壳,所述外壳上设置有两个单向阀,所述外壳内壁滑动连接有第三塞板,所述第三塞板与外壳内壁之间设置有第五弹性元件,所述第三塞板上连接有连杆,所述连杆远离第三塞板的一端穿过外壳并向外延伸连接有受力板。
16.本发明还公开了一种基于人工智能的病理辅助诊断系统的使用方法,包括以下步骤:
17.s1:装置未使用时,螺杆收缩在套管内部,装置整体高度较矮,便于存放,当需要通过分析仪对病理切片进行分析时,使病理切片放置在底座上,使病理切片长边对准第一夹板,短边对准第二夹板;
18.s2:随后通过转动套管上的旋钮,由于螺杆与套管螺纹连接,且在底部通过伸缩杆与底座固定的情况下,螺杆在套管转动时上移,使螺杆通过安装板带动分析仪上移,使分析仪上升至指定位置观察,套管转动会带动主动锥齿轮与转动杆上的从动锥齿轮相互啮合,使两侧丝杆在同步轮和皮带的作用下随转动杆同步转动;
19.s3:丝杆两侧螺纹线相反,使得丝杆在转动时第一套筒和第二套筒会相对靠近从而对病理切片的长边进行夹持定位,第一套筒和第二套筒接近时会带动第一连板和第二连板摆动,使第一连板和第二连板共同推动活动板在底座上滑动,使两侧活动板对病理切片的短边进行夹持定位,在此过程中,通过第二弹性元件与活动板连接的第二夹板会率先与病理切片的短边进行接触并夹持,此时第一夹板尚未与病理切片的长边接触,随着丝杆的继续转动,第二弹性元件被压缩,第二气体调节箱上的受力板与第二夹板相抵,使受力板通过连杆带动第三塞板在第二气体调节箱内移动,将内部的气体通过第二气管排放至工作箱
内,此时进入工作箱中的气体并不会直接由出气口排出而会被挡板阻挡,进而对第二塞板作用力,使第四弹性元件被压缩,对进入的气体进行暂存,避免第一夹板和第二夹板尚未对病理切片进行有效夹持时,从工作箱中排出的气体将病理切片吹动或吹飞,影响对病理切片的定位;
20.s4:随着丝杆的继续转动,第一夹板会对病理切片的长边进行接触夹持,此时第一弹性元件被压缩,第一气体调节箱上的受力板与第一夹板相抵,使受力板通过连杆带动第三塞板在第一气体调节箱内移动,将内部的气体通过第一气管排放至活动槽内,使第一塞板在活动槽内下移并使挡板的凹孔与出气口相对,此时分析仪已上升至指定观察位置,且第一夹板和第二夹板对病理切片进行有效夹持,第四弹性元件恢复形变并推动第二塞板在工作箱内移动,进而将第二气体调节箱内排入至工作箱内的气体由出气口排出,并通过正对病理切片的除尘板对病理切片外侧粘附的灰尘进行吹除,随后医务人员通过分析仪对处于中心位的病理切片进行观察分析。
21.与现有技术相比,本发明提供了一种基于人工智能的病理辅助诊断系统及其使用方法,具备以下有益效果:
22.1、该基于人工智能的病理辅助诊断系统及其使用方法,通过对支撑座进行调节,使传动组件驱动夹持机构对病理切片进行自动定位夹持,且在定位后,对病理切片上的灰尘进行清理,有利于提高病理图像分析的准确性以及图像分析的工作效率。
23.2、该基于人工智能的病理辅助诊断系统及其使用方法,通过转动套管上的旋钮,由于螺杆与套管螺纹连接,且在底部通过伸缩杆与底座固定的情况下,螺杆可在套管转动时上下移动,螺杆收缩在套管时,可有效减少装置的存放空间,螺杆相对套管上移时,可带动分析仪在指定位置进行观察分析。
24.3、该基于人工智能的病理辅助诊断系统及其使用方法,通过丝杆两侧螺纹线相反,使得丝杆在转动时第一套筒和第二套筒会相对靠近从而对病理切片的长边进行夹持定位,第一套筒和第二套筒接近时会带动第一连板和第二连板摆动,使第一连板和第二连板共同推动活动板在底座上滑动,使两侧活动板对病理切片的短边进行夹持定位,提高对病理切片的夹持定位效率和夹持定位效果。
25.4、该基于人工智能的病理辅助诊断系统及其使用方法,通过挡板对出气口进行阻挡,对从第二气体调节箱进入工作箱的气体进行暂存,避免第一夹板和第二夹板尚未对病理切片进行有效夹持时,从工作箱中排出的气体将病理切片吹动或吹飞,影响对病理切片的定位。
26.5、该基于人工智能的病理辅助诊断系统及其使用方法,通过在第二夹板对病理切片夹持后,第一夹板会对病理切片的长边进行接触夹持,使第一气体调节箱内的气体进入活动槽,使第三塞板带动挡板下移,使凹孔与出气口相对,此时工作箱内的气体在第二塞板的推动下从出气口排出,并通过正对病理切片的除尘板对病理切片外侧粘附的灰尘进行吹除,保证对病理切片的分析结果的准确性。
附图说明
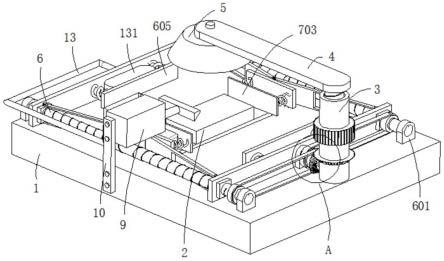
27.图1为本发明的结构示意图;
28.图2为本发明的图1中a部局部放大示意图;
29.图3为本发明的可调节支撑座的结构示意图;
30.图4为本发明的底座外部的结构示意图;
31.图5为本发明的图4中b部局部放大示意图;
32.图6为本发明的图4中c部局部放大示意图;
33.图7为本发明的第二夹持组件的结构示意图;
34.图8为本发明的工作箱的剖面结构示意图;
35.图9为本发明的图8中d部局部放大示意图;
36.图10为本发明的第一气体调节箱的结构示意图;
37.图11为本发明的除尘板的横截面结构示意图。
38.图中:1、底座;2、病理切片;3、可调节支撑座;301、套管;302、螺杆;303、伸缩杆;304、旋钮;305、主动锥齿轮;4、安装板;5、分析仪;6、丝杆;601、第一固定座;602、第一套筒;603、第二套筒;604、移动板;6041、第一弹性元件;605、第一夹板;7、第一连板;701、第二连板;702、活动板;7021、第二弹性元件;703、第二夹板;704、滑块;7041、滑槽;8、第二固定座;801、转动杆;8011、从动锥齿轮;802、同步轮;803、皮带;9、工作箱;901、进气口;902、出气口;903、第一气管;904、第一气体调节箱;905、出气管;10、连接板;11、除尘板;12、活动槽;121、第一塞板;122、第三弹性元件;123、挡板;1231、凹孔;13、第二气管;131、第二气体调节箱;14、第二塞板;141、第四弹性元件;15、外壳;151、第三塞板;152、第五弹性元件;153、连杆;154、受力板。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
40.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
41.实施例1:
42.参照图1、图2、图3和图4,一种基于人工智能的病理辅助诊断系统,包括底座1及病理切片2,病理切片2放置在底座1上,底座1上设置有可调节支撑座3,可调节支撑座3的顶部设置有安装板4,安装板4远离可调节支撑座3的一端连接有分析仪5,底座1上还设置有用于病理切片2定位的夹持机构以及受夹持机构驱动用于清理病理切片2的除尘机构,夹持机构包括第一夹持组件以及设置在第一夹持组件上的第二夹持组件,且可调节支撑座3通过传动组件驱动夹持机构对病理切片2夹持定位。
43.具体的,装置未使用时,螺杆302收缩在套管301内部,装置整体高度较矮,便于存放,当需要通过分析仪5对病理切片2进行分析时,使病理切片2放置在底座1上,使病理切片2长边对准第一夹持组件,短边对准第二夹持组件,通过对可调节支撑座3进行调节,使可调节支撑座3通过传动组件驱动夹持机构快速对病理切片2进行自动夹持定位,且在定位后,对病理切片2上的灰尘进行清理,有利于提高病理图像分析的准确性以及图像分析的工作效率。
44.实施例2:
45.参照图1、图4、图5、图6和图7,一种基于人工智能的病理辅助诊断系统,与实施例1相同,更进一步的是,第一夹持组件包括两个丝杆6,每个丝杆6的两端均设置有第一固定座601,第一固定座601与底座1固定相连,丝杆6的两端分别螺纹连接有第一套筒602和第二套筒603,第一套筒602和第二套筒603上均固设有移动板604,移动板604上设置有第一弹性元件6041,第一弹性元件6041远离移动板604的一端连接有第一夹板605;通过驱动两侧丝杆6转动,由于丝杆6两侧螺纹线相反,使得丝杆6在转动时第一套筒602和第二套筒603会相对靠近从而对病理切片2的长边进行夹持定位。
46.作为本发明优选的技术方案,第二夹持组件包括通过销轴与第一套筒602转动相连的第一连板7以及通过销轴与第二套筒603转动相连的第二连板701,第一连板7远离第一套筒602的一端以及第二连板701远离第二套筒603的一端铰接有同一个活动板702,活动板702上设置有第二弹性元件7021,第二弹性元件7021远离活动板702的一端连接有第二夹板703,第二夹板703滑动连接在底座1上;具体的,第一套筒602和第二套筒603随着丝杆6转动而相互接近时,会带动第一连板7和第二连板701摆动,使第一连板7和第二连板701共同推动活动板702在底座1上滑动,使两侧活动板702对病理切片2的短边进行夹持定位,实现对病理切片2的快速夹持,进而提高工作效率。
47.作为本发明优选的技术方案,活动板702的底部设置有滑块704,底座1上开设有与滑块704相配合的滑槽7041;使活动板702在第一连板7和第二连板701的推动下,通过滑块704滑动在滑槽7041内,提高活动板702移动的稳定性。
48.实施例3:
49.参照图1、图2、图3、图4和图6,一种基于人工智能的病理辅助诊断系统,与实施例2相同,更进一步的是,可调节支撑座3包括通过轴承转动连接在底座1上的套管301,套管301上设置有旋钮304,套管301内螺纹连接有螺杆302,螺杆302与底座1之间设置有伸缩杆303,螺杆302远离伸缩杆303的一端与安装板4固定相连;具体的,通过转动套管301上的旋钮304,由于螺杆302与套管301螺纹连接,且在底部通过伸缩杆303与底座1固定的情况下,螺杆302在套管301转动时上移,使螺杆302通过安装板4带动分析仪5上移,使分析仪5上升至指定位置观察。
50.作为本发明优选的技术方案,传动组件包括固设在底座1上的第二固定座8,第二固定座8上转动连接有转动杆801,转动杆801上设置有从动锥齿轮8011,套管301上设置有与从动锥齿轮8011啮合的主动锥齿轮305,传动组件还包括固设在丝杆6和转动杆801上的同步轮802,两个同步轮802之间设置有皮带803;具体的,套管301转动会带动主动锥齿轮305与转动杆801上的从动锥齿轮8011相互啮合,使两侧丝杆6在同步轮802和皮带803的作用下随转动杆801同步转动,进而使可调节支撑座3通过传动组件驱动夹持机构对病理切片2进行夹持工作。
51.实施例4:
52.参照图1、图4、图5、图7、图8和图11,一种基于人工智能的病理辅助诊断系统,与实施例3相同,更进一步的是,除尘机构包括固设在底座1上的连接板10,连接板10上设置有工作箱9,工作箱9开设有进气口901和出气口902,进气口901上连通有第一气管903,第一气管903远离进气口901的一端连接有第一气体调节箱904,第一气体调节箱904设置在活动板
702上,出气口902上连接有出气管905,出气管905远离出气口902的一端连接有除尘板11,除尘板11内设置有密闭腔体,除尘板11上开设有与密闭腔体相互连通的出气孔。
53.具体的,夹持机构对病理切片2进行夹持时,通过第二弹性元件7021与活动板702连接的第二夹板703会率先与病理切片2的短边进行接触并夹持,此时第一夹板605尚未与病理切片2的长边接触,随着丝杆6的继续转动,第二弹性元件7021被压缩,第二夹板703相对靠近活动板702,使第二气体调节箱131内的气体通过第二气管13进入工作箱9,并通过出气口902导出,最终通过除尘板11排出,对受第二夹板703夹持的病理切片2上的灰尘进行清理吹除。
54.实施例5:
55.参照图1、图4、图5、图7、图8、图9、图10和图11,一种基于人工智能的病理辅助诊断系统,与实施例4相同,更进一步的是,除尘机构还包括开设在工作箱9内的活动槽12,活动槽12上连接有第二气管13,第二气管13远离活动槽12的一端连接有第二气体调节箱131,第二气体调节箱131设置在移动板604上,活动槽12内壁滑动连接有第一塞板121,第一塞板121与活动槽12内壁之间设置有第三弹性元件122,第一塞板121远离第三弹性元件122的一端连接有挡板123,挡板123的底部穿过活动槽12并向其外部延伸,挡板123上开设有与与出气口902相配合的凹孔1231,工作箱9内壁滑动连接有第二塞板14,第二塞板14与工作箱9的内壁之间设置有第四弹性元件141。
56.进一步的,第一气体调节箱904和第二气体调节箱131均包括外壳15,外壳15上设置有两个单向阀,外壳15内壁滑动连接有第三塞板151,第三塞板151与外壳15内壁之间设置有第五弹性元件152,第三塞板151上连接有连杆153,连杆153远离第三塞板151的一端穿过外壳15并向外延伸连接有受力板154。
57.具体的,夹持机构对病理切片2进行夹持时,第二夹板703会率先与病理切片2的短边进行接触并夹持,此时第一夹板605尚未与病理切片2的长边接触,随着丝杆6的继续转动,第二弹性元件7021被压缩,第二气体调节箱131上的受力板154与第二夹板703相抵,使受力板154通过连杆153带动第三塞板151在第二气体调节箱131内移动,将内部的气体通过第二气管13排放至工作箱9内,此时进入工作箱9中的气体并不会直接由出气口902排出而会被挡板123阻挡,进而对第二塞板14作用力,使第四弹性元件141被压缩,对进入的气体进行暂存,避免第一夹板605和第二夹板703尚未对病理切片2进行有效夹持时,从工作箱9中排出的气体将病理切片2吹动或吹飞,影响对病理切片2的定位,随着丝杆6的继续转动,第一夹板605会对病理切片2的长边进行接触夹持,此时第一弹性元件6041被压缩,第一气体调节箱904上的受力板154与第一夹板605相抵,使受力板154通过连杆153带动第三塞板151在第一气体调节箱904内移动,将内部的气体通过第一气管903排放至活动槽12内,使第一塞板121在活动槽12内下移并使挡板123的凹孔1231与出气口902相对,此时分析仪5已上升至指定观察位置,且第一夹板605和第二夹板703对病理切片2进行有效夹持,第四弹性元件141恢复形变并推动第二塞板14在工作箱9内移动,进而将第二气体调节箱131内排入至工作箱9内的气体由出气口902排出,并通过正对病理切片2的除尘板11对病理切片2外侧粘附的灰尘进行吹除,随后医务人员通过分析仪5对处于中心位的病理切片2进行观察分析。
58.本发明还公开了一种基于人工智能的病理辅助诊断系统的使用方法,包括以下步骤:
59.s1:装置未使用时,螺杆302收缩在套管301内部,装置整体高度较矮,便于存放,当需要通过分析仪5对病理切片2进行分析时,使病理切片2放置在底座1上,使病理切片2长边对准第一夹板605,短边对准第二夹板703;
60.s2:随后通过转动套管301上的旋钮304,由于螺杆302与套管301螺纹连接,且在底部通过伸缩杆303与底座1固定的情况下,螺杆302在套管301转动时上移,使螺杆302通过安装板4带动分析仪5上移,使分析仪5上升至指定位置观察,套管301转动会带动主动锥齿轮305与转动杆801上的从动锥齿轮8011相互啮合,使两侧丝杆6在同步轮802和皮带803的作用下随转动杆801同步转动;
61.s3:丝杆6两侧螺纹线相反,使得丝杆6在转动时第一套筒602和第二套筒603会相对靠近从而对病理切片2的长边进行夹持定位,第一套筒602和第二套筒603接近时会带动第一连板7和第二连板701摆动,使第一连板7和第二连板701共同推动活动板702在底座1上滑动,使两侧活动板702对病理切片2的短边进行夹持定位,在此过程中,通过第二弹性元件7021与活动板702连接的第二夹板703会率先与病理切片2的短边进行接触并夹持,此时第一夹板605尚未与病理切片2的长边接触,随着丝杆6的继续转动,第二弹性元件7021被压缩,第二气体调节箱131上的受力板154与第二夹板703相抵,使受力板154通过连杆153带动第三塞板151在第二气体调节箱131内移动,将内部的气体通过第二气管13排放至工作箱9内,此时进入工作箱9中的气体并不会直接由出气口902排出而会被挡板123阻挡,进而对第二塞板14作用力,使第四弹性元件141被压缩,对进入的气体进行暂存,避免第一夹板605和第二夹板703尚未对病理切片2进行有效夹持时,从工作箱9中排出的气体将病理切片2吹动或吹飞,影响对病理切片2的定位;
62.s4:随着丝杆6的继续转动,第一夹板605会对病理切片2的长边进行接触夹持,此时第一弹性元件6041被压缩,第一气体调节箱904上的受力板154与第一夹板605相抵,使受力板154通过连杆153带动第三塞板151在第一气体调节箱904内移动,将内部的气体通过第一气管903排放至活动槽12内,使第一塞板121在活动槽12内下移并使挡板123的凹孔1231与出气口902相对,此时分析仪5已上升至指定观察位置,且第一夹板605和第二夹板703对病理切片2进行有效夹持,第四弹性元件141恢复形变并推动第二塞板14在工作箱9内移动,进而将第二气体调节箱131内排入至工作箱9内的气体由出气口902排出,并通过正对病理切片2的除尘板11对病理切片2外侧粘附的灰尘进行吹除,随后医务人员通过分析仪5对处于中心位的病理切片2进行观察分析。
63.本发明便于收纳,仅通过使装置由收缩状态变为展开状态,即,使可调节支撑座带动分析仪5上移至观察位,即可自动对病理切片2进行对齐定位夹持,且在定位后,对病理切片2上的灰尘进行清理,有利于提高病理图像分析的准确性以及图像分析的工作效率。
64.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1