一种基于连续激光的剖面水体参数测量装置和方法
1.本发明涉及海洋激光技术领域,尤其涉及一种基于连续激光的剖面水体参数测量装置和方法。
背景技术:
2.剖面水体信息是海洋、湖泊、水库等监测的一个重要参数。通过剖面水体信息,可以知道生物群落的分层情况;对水体水质监测,提前进行藻华预警等。现有的剖面水体相关激光雷达装置,为了获取剖面水体信息(即要有距离上的分辨率),因此只能采用脉冲激光雷达。脉冲激光器由于现阶段工艺还不成熟,激光器功率稳定性差、功率较低、波长受到限制等,导致基于脉冲激光的剖面水体激光雷达探测精度低、探测距离近、探测信息不全面等,同时脉冲激光器价格高,也进一步限制剖面水体激光雷达的普及。
技术实现要素:
3.本发明在于克服现有技术的不足,提供一种基于连续激光的剖面水体参数测量装置和方法,接收望远镜随着转台旋转,从而使得接收视场分布在激光发射路径上的不同距离处,即实现了距离上的分辨率,因此可使用技术更成熟、功率更高、探测距离更远的连续激光器;参考接收望远镜的使用能够判断出各个时刻连续激光器的功率强度,以实现对探测信号的归一化处理,通过信号强度闭环反馈,提高了信噪比,进一步增加了探测距离和准确度。
4.本发明采用如下技术方案:
5.一方面,一种基于连续激光的剖面水体参数测量装置,包括:连续激光器、延时光纤、发射望远镜、接收望远镜、参考接收望远镜、探测器、采集卡、计算模块和转台;所述接收望远镜在所述转台的带动下做0到90度旋转;
6.所述连续激光器产生的特定波段的连续激光经延时光纤后,通过所述发射望远镜入射到水体中;连续激光与水分子或者颗粒相互作用产生散射信号,第一路散射信号通过角度可调节的接收望远镜接收,经延时光纤后进入到所述探测器转换成电信号,所述采集卡采集电信号并发送到所述计算模块作为接收信号,所述计算模块基于所述接收信号调节所述连续激光器的输出功率;第二路散射信号通过角度固定的参考接收望远镜接收,经延时光纤后进入到所述探测器转换成电信号,所述采集卡采集电信号并发送到所述计算模块作为参考信号,所述计算模块基于所述参考信号获取所述连续激光器的输出功率强度,并基于输出功率强度对所述接收信号进行归一化处理后,计算出剖面水体信息。
7.优选的,所述的基于连续激光的剖面水体参数测量装置,还包括基座;所述发射望远镜、参考接收望远镜和转台固定在所述基座上方;所述接收望远镜固定在所述转台上方;所述转台做0到90度旋转。
8.优选的,所述计算模块基于所述接收信号调节所述连续激光器的输出功率,具体包括:
9.所述计算模块判断出接收信号对应的光子数小于探测器的饱和计数的1/3时,发送指令给连续激光器,控制连续激光器加大输出功率,直到所述接收信号对应的光子数达到探测器饱和计数的2/3。
10.优选的,所述发射望远镜出射的激光在接收望远镜旋转90度的视场中心面上。
11.优选的,所述发射望远镜、接收望远镜和参考接收望远镜均经过防水密封处理,具体为放置在对应的密闭容器中,对应的密闭容器和延时光纤的连接处也进行防水处理。
12.优选的,密闭容器的透光面包括透明的窗口玻璃或其他高透光率物质。
13.优选的,所述接收望远镜的安装位置离与所述发射望远镜的距离为0.5米~2米。
14.优选的,所述接收望远镜前方设置有一套筒。
15.优选的,所述探测器为单光子探测器。
16.另一方面,一种基于连续激光的剖面水体参数测量方法,其特征在于,基于所述的基于连续激光的剖面水体参数测量装置,包括:
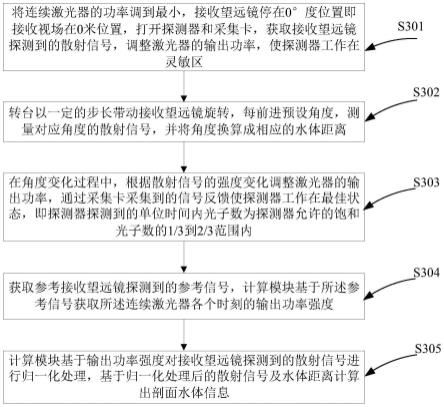
17.s301,将连续激光器的功率调到最小,接收望远镜停在0
°
度位置即接收视场在0米位置,打开探测器和采集卡,获取接收望远镜探测到的散射信号,调整激光器的输出功率,使探测器工作在灵敏区;
18.s302,转台以一定的步长带动接收望远镜旋转,每前进预设角度,测量对应角度的散射信号,并将角度换算成相应的水体距离;
19.s303,在角度变化过程中,根据散射信号的强度变化调整激光器的输出功率,通过采集卡采集到的信号反馈使探测器工作在最佳状态,即探测器探测到的单位时间内光子数为探测器允许的饱和光子数的1/3到2/3范围内;
20.s304,获取参考接收望远镜探测到的参考信号,计算模块基于所述参考信号获取所述连续激光器各个时刻的输出功率强度;
21.s305,计算模块基于输出功率强度对接收望远镜探测到的散射信号进行归一化处理,基于归一化处理后的散射信号及水体距离计算出剖面水体信息。
22.本发明的有益效果如下:
23.(1)本发明的接收望远镜在转台的带动下做0到90度旋转,从而使得接收视场分布在激光发射路径上的不同距离处,即实现了距离上的分辨率,因此能够使用连续激光器,采用连续激光器,相比于脉冲激光器具有如下优点:第一方面,功率更加稳定,因此基于连续激光的剖面水体激光雷达有更高的测量精度;第二方面,功率更高,因此基于连续激光的剖面水体激光雷达有更大的测量范围;第三方面,采用连续激光器可以使用各种波长的激光器,因此基于连续激光的剖面水体激光雷达可测得更完整的剖面水体信息;第四方面,工艺更加成熟,价格更低;
24.(2)本发明基于接收望远镜的信号强度实时调整激光器的输出功率,使探测器始终处于最佳信噪比的状态,探测精度更高,探测距离更远;
25.(3)本发明基于参考接收望远镜的信号,能够获取到连续激光器各个时刻的输出功率强度,进而对接收望远镜的探测的散射信号进行归一化处理,通过信号强度闭环反馈,提高了信噪比,进一步增加了探测距离和准确度;
26.(4)本发明采用单光子探测器,能够探测极其微弱的散射信号,增加水体的探测深度。
27.根据下文结合附图对本发明具体实施例的详细描述,本领域技术人员将会更加明了本发明的上述及其他目的、优点和特征。
附图说明
28.图1为本发明实施例的基于连续激光的剖面水体参数测量装置的结构框图;
29.图2为本发明实施例的接收望远镜的旋转示意图;
30.图3为本发明实施例的基于连续激光的剖面水体参数测量方法的流程图;
31.图4为本发明实施例的测量得到的剖面水体信息示意图;
32.其中,1、连续激光器;2、延时光纤;3、发射望远镜;4、接收望远镜;5、参考接收望远镜;6、探测器;7、采集卡;8、计算模块;9、基座;10、转台。
具体实施方式
33.下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明的保护范围。
34.参见图1所示,本实施例一种基于连续激光的剖面水体参数测量装置,包括:连续激光器1、延时光纤2、发射望远镜3、接收望远镜4、参考接收望远镜5、探测器6、采集卡7、计算模块8、基座9和转台10;所述接收望远镜4在所述转台10的带动下做0到90度旋转(参见图2所示,如果旋转到90度,距离将会无穷远,因此,实际旋转时,不会到达90度)。
35.本实施例中,连续激光器1产生特定波段的连续激光,可从紫外到近红外波段,之后经过延时光纤2连接到经过水密处理后的发射望远镜3,发射望远镜3固定在基座9上。连续激光经发射望远镜3后照射到水体中,连续激光与水分子或者颗粒物相互作用产生的散射信号通过接收望远镜4接收,接收望远镜4固定在可90度旋转的步进电机转台10或者其他可90度旋转的转台10上,散射信号之后通过延时光纤2传递到探测器6被转换成电信号,电信号通过采集卡7采集后传递到计算模块8。另一路固定位置的散射信号经参考接收望远镜5后通过延时光纤2传递到探测器6被转换成电信号,电信号通过采集卡7采集后传递到计算模块8作为参考信号。最后,获取的信号通过处理获得剖面水体信息。当固定在转台10上的接收望远镜4接收视场随转台10旋转到激光发射路径的较远处时,其信号会变得极其微弱,甚至被噪声淹没。在此情况下,可以通过传递到计算模块8的接收望远镜4的信号进行判断当前接收视场的信号强弱,当发现信号对应的计数小于单光子探测器6的饱和计数的1/3时,在保证单光子探测器6不发生饱和的前提下,计算模块8发送指令给激光器,控制激光器缓慢加大功率,直到接收望远镜4的接收信号对应的计数达到单光子探测器6饱和计数的2/3。所述参考信号用来判断各个时刻激光器的功率强度,用来对探测信号进行归一化处理。
36.具体的,在探测过程中,激光器的输出功率是在不断调整的,接收望远镜4的信号也是在不同功率和角度下测量获得。由于参考信号的强度与激光器的输出功率可以认为是线性关系,因此可以通过角度固定的参考接收望远镜5的参考信号来获取实际的输出功率,再将接收望远镜4获取到的信号除以根据参考接收望远镜5获取到的输出功率,可获得在单位功率下的信号,即归一化处理后的信号。通过信号强度闭环反馈,提高了信噪比,进一步
增加了探测距离和准确度。
37.进一步的,所述发射望远镜3出射的激光在接收望远镜4旋转90度的视场中心面上。
38.本实施例的连续激光器1,功率稳定、可调。由于随着接收望远镜4从0度到90度旋转,接收的视场在激光器发射光路上的距离由近到远(参见图2所示,当接收望远镜4的旋转角度为0度时,接收视场为视场1,靠近发射望远镜3;当接收望远镜4旋转到39.8度时,接收的视场为视场3,远离发射望远镜3),回波信号变化范围大,因此通过调节连续激光器1的输出功率,可以避免探测器6进入饱和区,使探测器6始终工作在高灵敏度区,有更高的信噪比。由于蓝绿光在海水中的衰减系数较小,本实施例所述的连续激光器1使用的波长优选532nm,也可以根据实际情况使用其他波长的连续激光器1。
39.进一步的,所述发射望远镜3是经过水密处理的,可以是将其放在密闭容器中,密闭容器的透光面为透明的窗口玻璃或者具有高透光率的其他物质。密闭容器和延时光纤2的连接处也具有防水功能。
40.所述接收望远镜4是经过水密处理的,可以是将其放在密闭容器中,密闭容器的透光面为透明的窗口玻璃或者具有高透光率的其他物质。密闭容器和延时光纤2的连接处也具有防水功能。同时密闭容器可以做0度到90度旋转,其驱动方式可以是步进电机或者其他驱动方式,精度可以达到0.1度或以上。
41.所述参考接收望远镜5是经过水密处理的,可以是将其放在密闭容器中,密闭容器的透光面为透明的窗口玻璃或者具有高透光率的其他物质。密闭容器和延时光纤2的连接处也具有防水功能。
42.所述基座9在条件允许情况下,接收望远镜4的安装位置离发射望远镜3的位置应尽可能远,具体的,接收望远镜4的安装位置离发射望远镜3的位置控制在0.5米到2米之间,以便减少接收视场外的激光噪声对接收信号的影响。
43.所述接收望远镜4,可通过在接收望远镜4前面增加一个套筒,以减少接收视场外的激光噪声对接收信号的影响。所述套筒优选使用黑色塑胶材质。
44.所述探测器6优选为单光子探测器6,其能够探测微弱的散射信号,用于将散射信号转换成电信号,电信号由采集模块采集,采集的数字信号通过计算模块8处理后获得剖面水体信息。
45.参见图3所示,本发明还公开了一种剖面水体信息的测量方法,器件安装到位,光路调整完成后,测量步骤为:
46.s301,将连续激光器的功率调到最小,接收望远镜停在0
°
度位置即接收视场在0米位置,打开探测器和采集卡,获取接收望远镜探测到的散射信号,调整激光器的输出功率,使探测器工作在灵敏区;
47.具体的,使探测器工作在灵敏区,能够获得尽可能高的信噪比。
48.s302,转台以一定的步长带动接收望远镜旋转,每前进预设角度,测量对应角度的散射信号,并将角度换算成相应的水体距离;
49.具体的,所述预设角度可以为0.1度,具体的步长可根据步进电机的精度和实际需求来确定。将角度换算成相应的水体距离具体为参见图2所示,0度对应的是0米处的信号,根据三角函数,可以算出0到90度内任意角度对应的距离信号。
50.s303,在角度变化过程中,根据散射信号的强度变化调整激光器的输出功率,通过采集卡采集到的信号反馈使探测器工作在最佳状态,即探测器探测到的单位时间内光子数为探测器允许的饱和光子数的1/3到2/3范围内;
51.使探测器工作在最佳状态,能够尽可能高的信噪比。
52.s304,获取参考接收望远镜探测到的参考信号,计算模块基于所述参考信号获取所述连续激光器各个时刻的输出功率强度;
53.s305,计算模块基于输出功率强度对接收望远镜探测到的散射信号进行归一化处理,基于归一化处理后的散射信号及水体距离计算出剖面水体信息。
54.需要说明的是,随着旋转角度的增大,单位角度对应的水体深度增加(参见图2所示,接收望远镜从0度到1度对应的视场前进距离小于从39.8度到40.8度对应的距离),因此可以根据需要减小旋转的步长。
55.参见图4所示,为根据本实施例的基于连续激光的剖面水体参数测量装置和基于连续激光的剖面水体参数测量方法测量得到的剖面水体信息示意图。
56.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1