一种基于无人机机载多光谱仪的绿潮藻面积监测方法
1.本发明涉及一种基于无人机机载多光谱仪的绿潮藻面积监测方法,属于绿潮监测技术领域。
背景技术:
2.近几年来由于大气变化和人类活动等原因造成绿潮爆发,绿潮(green tide)是由海洋大型绿藻快速生长与聚集所形成的一种有害藻华现象,普遍发生在沿海地区。已有的研究表明,形成绿潮的藻类主要是对营养盐吸收能力和适应环境胁迫能力均较强的机会主义海藻,如:浒苔、石莼、硬毛藻、刚毛藻等。绿潮的暴发会对环境和经济带来负面影响:第一,绿潮暴发后生物量极大,大范围覆盖海面,遮挡阳光,吸收海水中的营养盐,影响海洋中其他动植物的生长;第二,绿潮大规模堆积会腐烂发臭,影响海滨城市旅游业和人民的健康;第三,绿潮的清理需要耗费大量的人力和物力。正是由于绿潮爆发带来的负面影响,所以必须对绿潮藻进行治理。
3.绿潮在海面的分布较广,有时可达数万平方公里,因此依靠传统的航次调查很难对海上大范围绿潮进行全面实时监控;卫星遥感影像具有较高的实效性、经济性以及大面积同步观测的能力而作为绿潮灾害动态监测的重要手段,并广泛应用于黄海绿潮监测,但是由于卫星遥感相对较低的分辨率,利用卫星首次观测到绿潮暴发时,漂浮藻体覆盖面积往往已经达到数十平方公里,导致绿潮灾害的防控治理还处于被动应对阶段。
4.因此,目前缺乏科学系统的手段能够对绿潮的发生及发展情况进行全面、实时及快速的监控。
技术实现要素:
5.为解决上述问题,本发明提供一种基于无人机机载多光谱仪的绿潮藻面积监测方法,能够实时快速的监测绿潮面积,为绿潮的防控和治理提供数据支持。
6.为解决上述技术问题,本发明所采用的技术方案是:
7.包括以下步骤:
8.步骤1,绿潮藻多光谱数据采集:利用无人机搭载多光谱仪到绿潮暴发区进行数据采集;
9.步骤2,多光谱数据预处理:对采集的多光谱数据进行辐射校正预处理;
10.步骤3,图像拼接:对辐射校正后的多光谱数据进行多光谱图像拼接处理;
11.步骤4,绿潮藻识别:利用植被指数的方法,识别多光谱图像中的绿潮藻;
12.步骤5,背景分割:利用阈值分割的方法,将植被指数识别后的多光谱图像分割成绿潮藻和其他背景两部分;
13.步骤6,绿潮面积计算:利用无人机的地面采样距离,得出单个像元所代表的实际面积,推导得到无人机飞行高度和航拍面积的对应关系公式,统计绿潮藻的像元数量,即可得出绿潮的真实面积。
14.步骤7,绿潮面积监测误差计算:提出“预设标准面积法”,提前在航拍区设置多个固定面积的绿潮藻样本,对比绿潮藻样本的实际面积和算法的监测面积,即可验证绿潮面积监测的误差。
15.本发明技术方案的进一步改进在于:所述步骤1中,采用大疆精灵4多光谱版集成系统,规划好航拍区域,利用无人机搭载多光谱仪,设置拍照方式为等时间间隔拍照,设置飞行高度为50米,设置航拍俯仰角为垂直向下,设置航向和旁向重叠率,设置完飞行参数后,起飞进行多光谱数据采集;其中,采集到的每组多光谱数据包含一张可见光图像和五张单波段图像,各波段分别为:蓝b:450nm
±
16nm,绿g:560nm
±
16nm,红r:650nm
±
16nm,红边re:730nm
±
16nm,近红外nir:840nm
±
26nm,单个传感器的有效像素为208万。
16.本发明技术方案的进一步改进在于:所述步骤2中快速辐射校正的方法为“替代传感器校正法”,具体实施方式为:按照波长依次导入各单波段数据,然后将五个单波段数据进行波段合成,合成一个包含五个波段的多光谱数据,利用快速大气校正算法,选择包含这五个波段的替代传感器进行辐射校正,校正后的绿潮藻光谱曲线符合植被光谱的光谱特征,说明校正结果正确。
17.本发明技术方案的进一步改进在于:所述步骤3中,利用pix4dampper软件对辐射校正后的图像进行拼接:首先根据坐标位置将所有图像按照航拍位置排列,然后提取相邻图像中的特征点,采用特征点匹配的方法进行拼接,将多幅单张多光谱图像拼接成一幅包含整个航拍区域的大图像。
18.本发明技术方案的进一步改进在于:所述步骤4中,植被指数是将不同波段的光谱反射率进行组合运算形成的参数,不同地物在各波段的反射率不相同,绿潮藻有红光波段的吸收能力强,近红外波段反射能力较强的“红边效应”,根据此原理来识别多光谱图像中的绿潮;植被指数为归一化绿波段差值植被指数gndvi,其公式如下:
19.gndvi=(r
nir-r
green
)/(r
nir
+r
green
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1),
20.其中r代表各波段的反射率;基于matlab环境,编写gndvi植被指数的绿潮藻识别算法,对多光谱图像中的绿潮藻进行识别。
21.本发明技术方案的进一步改进在于:所述步骤5中,利用最大类间方差阈值分割法对植被指数处理后的多光谱图像进行分割,最大类间方差法使用的是聚类的思想,把多光谱图像的灰度值分为两个部分,使得两部分之间的灰度值差异最大,每个部分内部之间的灰度值差异最小,通过方差的计算选取一个合适的灰度阈值来进行分割,通过阈值分割将多光谱图像分割为目标绿潮藻和背景其他地物两部分。
22.本发明技术方案的进一步改进在于:所述步骤6中,根据无人机的多光谱仪的地面采样距离gsd,gsd指多光谱影像中单位像元所代表的实际尺寸大小,gsd与飞行器的飞行高度、成像系统的镜头焦距还有像元的尺寸有关,大疆精灵4多光谱版gsd公式如下所示:
23.gsd=h/18.9(cm/pixel)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2),
24.其中,h为无人机飞行高度,根据地面采样距离推出无人机飞行高度和航拍面积的对应公式,其公式如下所示:
25.s=(h/18.9)2*(p/1000)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3),
26.其中,s为航拍区域的真实面积,单位为平方米,h为无人机飞行高度,p为多光谱图像的总像素;统计图像的总像元数和绿潮藻的像元数,即可分别得出多光谱图像的真实面
积和绿潮的真实面积。
27.本发明技术方案的进一步改进在于:所述步骤7中,创新性的提出了“预设标准面积法”来验证面积监测的误差,通过在航拍区设置多个不同面积的绿潮藻样本,对比实际面积和监测面积即可得出面积监测的误差。
28.由于采用了上述技术方案,本发明取得的技术进步是:
29.本发明采用的无人机影像同卫星影像相比具有更高的空间分辨率,同时可以灵活的调整监测区域,便携性较好,受大气影响较小,所以无人机监测绿潮能够极大地弥补绿潮早期监测中的遥感影像精度不足,还可以根据无人机空间分辨率接近真实值的特点,对卫星遥感监测的真实性进行检验。
30.本发明通过无人机机载多光谱仪到绿潮藻暴发区进行数据采集,通过对多光谱图像中的识别与分割处理,结合无人机飞行高度和航拍面积的对应关系公式,可随时,随地,快速的实现对绿潮面积的监测。
31.本发明所使用的“替代传感器”辐射校正法操作简单,能在无需任何额外参数的情况下,实现多光谱图像的快速辐射校正。
32.本发明所提出的“预设标准面积”误差验证法操作简单,可靠性强,能真实反应绿潮面积监测的准确率。
附图说明
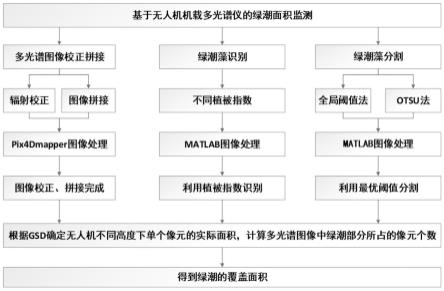
33.图1是本发明的数据处理流程图。
具体实施方式
34.为使本发明的目的、内容和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.参照图1所示,本发明提供的一种基于无人机机载多光谱仪的绿潮藻面积监测方法,利用无人机机载多光谱仪进行绿潮面积监测的流程如下:首先设置参数:规划航拍区域,规划航线,设置重叠率;然后执行航拍任务:大疆精灵4多光谱版飞行系统,到绿潮暴发区域进行航拍;再多光谱图像数据导出:执行完任务后,将无人机数据导出到电脑上;然后进行多光谱图像处理:利用pix4dmapper软件进行拼接,将航拍多光谱图像拼接成一幅大的图像;利用植被指数识别多光谱图像中的绿潮藻;利用阈值分割法对多光谱图像进行分割,将绿潮藻分割出来,统计绿潮藻所占的像元数目;最后进行绿潮面积计算:通过gsd得出的像元对应真实面积,结合绿潮藻所占像元数目,即可得出绿潮的真实面积。
36.本实施例,基于无人机机载多光谱仪的绿潮面积监测方法,包括以下步骤:
37.步骤1:多光谱数据采集方法,本发明所使用的设备为大疆精灵4多光谱版集成系统,规划好航拍区域,,利用无人机搭载多光谱仪,设置拍照方式为等时间间隔拍照,设置飞行高度为50米,设置航拍俯仰角为垂直向下,设置航向和旁向重叠率,设置完飞行参数后,起飞进行多光谱数据采集。采集到的每组多光谱数据包含一张可见光图像和五张单波段图像,各波段分别为:蓝(b):450nm
±
16nm,绿(g):560nm
±
16nm,红(r):650nm
±
16nm,红边
(re):730nm
±
16nm,近红外(nir):840nm
±
26nm,单个传感器的有效像素为208万。
38.步骤2:辐射校正方法,采用“替代传感器参数”的方法,实现单组影像的快速辐射校正,按照波长依次导入各单波段数据,然后将五个单波段数据进行波段合成,合成一个包含五个波段的多光谱数据,利用快速大气校正算法,选择包含这五个波段的替代传感器(如aisa-es,landsat,modis传感器)进行辐射校正,校正后的绿潮藻光谱曲线符合植被光谱的光谱特征,说明校正结果正确。
39.步骤3:图像拼接方法,利用pix4dampper软件对辐射校正后的图像进行拼接,首先根据坐标位置将所有图像按照航拍位置排列,然后提取相邻图像中的特征点,采用特征点匹配的方法进行拼接,将多幅单张多光谱图像拼接成一幅包含整个航拍区域的大图像。
40.步骤4:图像识别方法,植被指数是将不同波段的光谱反射率进行组合运算形成的参数,不同地物在各波段的反射率不相同,由于绿潮有红光波段的吸收能力较强,近红外波段反射能力较强的“红边效应”,可以根据此原理来识别多光谱图像中的绿潮。本发明所使用的植被指数为归一化绿波段差值植被指数(gndvi),其公式如下:
41.gndvi=(r
nir-r
green
)/(r
nir
+r
green
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1),
42.其中r代表各波段的反射率。基于matlab环境,编写基于gndvi植被指数的绿潮藻识别算法,对多光谱图像中的绿潮藻进行识别。
43.步骤5:图像分割方法,利用最大类间方差阈值分割法对植被指数处理后的多光谱图像进行分割,最大类间方差法使用的是聚类的思想,把多光谱图像的灰度值分为两个部分,使得两部分之间的灰度值差异最大,每个部分内部之间的灰度值差异最小,通过方差的计算选取一个合适的灰度阈值来进行分割,通过阈值分割将多光谱图像分割为目标绿潮藻和背景其他地物两部分。
44.步骤6:面积计算方法,根据无人机的多光谱仪的地面采样距离(gsd),gsd指多光谱影像中单位像元所代表的实际尺寸大小,gsd与飞行器的飞行高度、成像系统的镜头焦距还有像元的尺寸有关,大疆精灵4多光谱版的gsd公式如下所示:
45.gsd=h/18.9(cm/pixel)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2),
46.其中,h为无人机飞行高度,根据地面采样距离推出无人机飞行高度和航拍面积的对应公式,其公式如下所示:
47.s=(h/18.9)2*(p/1000)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3),
48.其中,s为航拍区域的真实面积,单位为平方米,h为无人机飞行高度,p为多光谱图像的总像素。统计图像的总像元数和绿潮藻的像元数,就可以分别得出多光谱图像的真实面积和绿潮藻的真实面积。
49.步骤7:误差验证方法,提出了“预设标准面积法”,通过在航拍区设置多个不同面积的绿潮藻样本,对比监测面积和实际面积,即可得出绿潮面积监测的误差。
50.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1