后置分光瞳差动共焦曲率半径快速相对测量方法与装置
1.本发明涉及后置分光瞳差动共焦曲率半径快速相对测量方法与装置,属于光学精密测量技术领域。
背景技术:
2.球面光学元件被大量应用于医学检测、数码相机等光学系统中,因此球面光学元件具有极大的需求量和生产量。球面光学元件曲率半径的精度直接决定了光学系统的性能,因此,其检测精度在光学测量领域具有重大意义。
3.目前,曲率半径的测量方法可以分为接触式与非接触式两种:
4.常见的接触式测量方法包括样板法、球径仪法、三坐标法,激光跟踪法等。样板法与球径仪法操作简便,测量速度快。然而样板法受样板自身精度和被测镜之间应力变化影响,其测量精度不高且受测量人员主观因素影响;而球径仪法测量精度仅为30ppm,且该方法测量精度随曲率半径值增大而降低。三坐标法是通过对被测球面进行扫描,得到最佳拟合球作为曲率半径的测量结果,其测量精度为20ppm。然而该方法不适用小曲率半径测量,且测量效率低。激光跟踪法通过测量一个激光跟踪球的半径,计算得到待测球的曲率半径,其相对测量精度为18ppm,该方法仅适用于大口径的球面元件测量,且测量流程较为繁琐。上述接触式测量方法都具有易划伤被测样品表面的固有缺陷。
5.非接触式测量方法主要包括几何光学法和干涉测量法。几何光学法包括刀口阴影法、自准直法等。其中,刀口阴影法测曲率半径值,操作简便,但是测量精度不高,仅50ppm。自准直法仅适用于大口径元件曲率半径测量,其测量5m以上曲率半径时精度为500ppm。对于干涉测量法,是目前广为应用的高精度测量方法。经典的干涉法利用相位测量干涉仪分别对被测球面的猫眼位置和共焦位置进行定焦,进而得到待测曲率半径,测量精度可达10ppm。在此基础上,jan.k等人提出了基于波长调谐移相的绝对干涉测量快速检测方法,其测量精度为10ppm。然而干涉法存在姿态调整过程较为繁琐,装卡后需较长时间稳定干涉条纹等问题,此外干涉条纹极易受到气流、温度、震动等环境因素环境干扰,因而该方法的效率不高。
6.本发明人课题组于2010年提出了激光差动共焦曲率半径测量方法,该方法利用利用差动共焦光强响应曲线的绝对零点精确对应测量光束焦点这一特性来对被测表面的猫眼位置和共焦位置分别定焦,进而得到待测曲率半径。该方法精度可达5ppm,但是仍需要对猫眼位置与共焦位置两点进行扫描定焦,还需要进行较为繁琐的姿态调整过程。因此该方法效率有待进一步提高。
技术实现要素:
7.为了解决批量球面元件曲率半径高精度测试效率低的问题,本发明的主要目的是提供一种后置分光瞳差动共焦曲率半径快速相对测量方法与装置,利用后置分光瞳差动精准定焦,将曲率半径的绝对测量过程,转变为基于样板的相对测量,既能够保留差动共焦高
精度测量的优势,又能够显著提高测量效率,进而实现高效、快速、便捷地检测球面元件的曲率半径,实现大批量球面元件的高效率、高精度加工检测。
8.本发明的目的是通过下述技术方案实现的。
9.本发明公开的后置分光瞳差动共焦曲率半径快速相对测量方法,可以实现球面元件曲率半径的快速高精度测量,具体步骤如下:
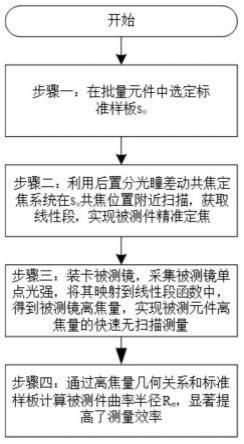
10.步骤一:在批量元件中选定与被测镜同批次的样板s0,样板的元件参数的名义值和n个同批次被测镜s
1-sn相同。
11.所述元件参数包括曲率半径、口径、表面反射率。
12.步骤二:利用后置分光瞳差动共焦定焦系统在s0共焦位置附近进行扫描,对采集到的光强信号进行差动处理得到差动共焦曲线,对该曲线的线性段进行线性拟合得到拟合直线l
diff
(z),根据l
diff
(z)零点的轴向位置坐标将s0精确位于共焦位置,实现被测元件的精准定焦。
13.步骤三:从立式卡具上取下s0并依次装卡被测镜sn,n=1~n,该过程通过被测镜自身重力保证sn的重复空间定位。利用后置分光瞳差动共焦定焦系统采集装卡sn后的差动光强值,并将其映射到l
diff
(z)进而得到离焦量δzn,保证批量元件的快速测量。
14.步骤四:利用换算关系,由标定样板曲率半径r0和离焦量δzn计算被测曲率半径rn,既能够保留差动共焦高精度测量的优势,又能够显著提高测量效率,进而实现高效、快速、便捷地检测球面元件的曲率半径。
15.作为优选,步骤四实现方法为:利用如下公式所示的换算关系,由标定样板曲率半径r0和离焦量δzn计算被测曲率半径rn。
[0016][0017]
其中,r0为标定样板s0的曲率半径,rn为被测样品的曲率半径,δzn代表标定样板球心o0和被测样品球心on之间的轴向偏移量,df为支撑夹具的装卡直径。保留差动共焦高精度测量的优势,显著提高了测量效率。
[0018]
作为优选,步骤四实现方法为:利用如下公式所示的换算关系,由标定样板曲率半径r0和离焦量δzn计算被测曲率半径rn,既能够保留差动共焦高精度测量的优势,又能够显著提高测量效率,进而实现高效、快速、便捷地检测球面元件的曲率半径。
[0019][0020]
其中,r0为标定样板s0的曲率半径,rn为被测样品的曲率半径,δzn代表标定样板球心o0和被测样品球心on之间的轴向偏移量,df为支撑夹具的装卡直径。
[0021]
本发明公开的后置分光瞳差动共焦曲率半径快速相对测量方法,采用后置分光瞳差动共焦探测技术得到差动共焦曲线,通过被测元件反射的测量光经过d形光阑和显微物镜,成像在ccd探测面。根据探测得到的椭圆形光斑,在光轴位置的圆形探测区域即虚拟针孔共焦两侧对称地设置虚拟针孔前焦vph1、后焦vph2。将虚拟针孔内的灰度值积分作为探测光强,通过探测两个虚拟针孔的轴向光强响应并作差动处理,得到差动共焦响应曲线,被测件差动光强值i
diff
(δzn)表示为:
[0022]idiff
(δzn)=i
vph2
(δzn)-i
vph1
(δzn)
[0023]
其中,i
vph1
(δzn)表示为虚拟针孔前焦vph1处的光强值、i
vph2
(δzn)为虚拟针孔前焦vph2处的光强值。通过线性拟合获得高斜率、长线性范围的拟合直线,以此保证曲率半径测量精度和测量范围。
[0024]
本发明公开的后置分光瞳差动共焦曲率半径快速相对测量方法,通过阈值设定i
ts
,判断离焦量是否处于线性响应区间内。将样板s0扫描处理得到的虚拟针孔的光强响应i
vph1
、i
vph2
进行求和,得到光强响应和i
sum
:
[0025]isum
=i
vph1
+i
vph2
[0026]
其中,i
vph1
表示为虚拟针孔前焦vph1处的光强值、i
vph2
为虚拟针孔前焦vph2处的光强值。
[0027]
当被测件sn采集的单点光强响应和i
sumn
》i
ts
时,判定该差动光强值处于线性响应区间内,即被测件未超量程,能够进行下一步测量;当被测件sn采集的单点光强响应和i
sumn
《i
ts
时,判定该差动光强值处于线性响应区间外,即被测件超量程,此时返回无法测量该被测件的信息。因此根据i
sum
是否大于i
ts
来实现超量程判断。
[0028]
本发明公开的后置分光瞳差动共焦曲率半径快速相对测量方法,采用立式环形装卡结构保证样板和各个被测件能依靠自身重力实现快速稳定装卡,并保证同批次球面元件装卡后,其球面上相同矢高所对应的纬线(即球面元件与环形卡具的接触线)可重复定位在相同的空间位置。对于凹球面测量,环形卡具的外圆与被测球面接触;对于凸球面测量,环形卡具的内圆与被测球面接触。
[0029]
本发明还公开一种后置分光瞳差动共焦曲率半径快速相对测量装置,用于实现所述后置分光瞳差动共焦曲率半径快速相对测量方法。所述后置分光瞳差动共焦曲率半径快速相对测量装置包括后置分光瞳差动共焦模块、运动控制与监测模块和姿态调整模块。其中,后置分光瞳差动共焦模块使用d形光阑将ccd探测面上的光斑设置为虚拟针孔位置,将其轴向光强响应作差动处理,实现对被测元件的精准定焦。后置分光瞳差动共焦模块包括点光源、准直镜、反射镜、会聚镜、d形光阑、显微物镜和光电探测器ccd。
[0030]
运动控制模块使用伺服电机驱动丝杠带动高精度气浮导套沿光轴方向运动,同时使用光栅尺实时监测位置信息,完成扫描和位置数据采集。运动控制模块包括伺服电机、丝杠、高精度气浮导套、高精度气浮导轨、光栅尺。姿态调整模块使用二维调整架调整标准会聚镜和被测镜的空间位置,使其中心与光轴重合,将曲率半径的绝对测量过程,转变为基于样板的相对测量。姿态调整过程利用环形夹具,将被测件快速而精确地定位于特定样板的共焦位置处。姿态调整模块包括二维调整架、环形夹具。
[0031]
有益效果:
[0032]
1.本发明公开的后置分光瞳差动共焦曲率半径快速相对测量方法与装置,通过在一个已知曲率半径的球面元件的共焦位置处进行扫描,通过差动共焦扫描获得其线性段的拟合方程;然后装卡被测球面元件,采集单点差动光强,并将其映射到线性段拟合方程中,实现被测元件离焦量的快速无扫描测量,解决目前球面光学元件曲率半径的测量方法难以满足大批量、高速度的测量需求的问题。
[0033]
2.本发明公开的后置分光瞳差动共焦曲率半径快速相对测量方法与装置,通过离焦量和标准球面元件曲率半径计算得到被测曲率半径。本发明将曲率半径的绝对测量过程,转变为基于样板的相对测量。本发明既能够保留差动共焦高精度测量的优势,又显著提
高测量效率,提高大批量球面元件的加工效率和精度。
[0034]
3.本发明公开的后置分光瞳差动共焦曲率半径快速相对测量方法与装置,采用立式环形装卡结构保证样板和各个被测件能依靠自身重力实现快速稳定装卡,并保证同批次球面元件装卡后,其球面上相同矢高所对应的纬线(即球面元件与环形卡具的接触线)能够重复定位在相同的空间位置,只需一次扫描测量和n次单次装卡测量即能够实现n件球面元件曲率半径的快速、高精度、非接触检测。本发明能够解决目前光学元件的生产制造效率低的问题,满足大规模加工和装配过程中的检测需求,提高曲率半径的检测效率。
附图说明
[0035]
图1是本发明后置分光瞳差动共焦曲率半径快速相对测量流程图;
[0036]
图2是本发明基于后置分光瞳差动共焦探测原理图;
[0037]
图3是本发明实施例1的针对凹球面的曲率半径相对测量几何模型图;
[0038]
图4是本发明实施例2的针对凸球面的曲率半径相对测量几何模型图;
[0039]
图5是本发明实施例1的针对凹球面的后置分光瞳差动共焦曲率半径快速相对测量方法与装置图;
[0040]
图6是本发明实施例2的针对凸球面的后置分光瞳差动共焦曲率半径快速相对测量方法与装置图;
[0041]
其中:1-点光源、2-偏振分光镜、3-准直镜、4-反射镜、5-d形光阑、6-显微物镜、7-光学探测器ccd、8-调整架、9-会聚镜、10-夹具、11-电机、12-丝杠、13-光栅读数头、14-气浮导套、15-气浮导轨、16-光栅尺、17-样板s0、18-被测元件sn、19-虚拟针孔前焦vph1、20-虚拟针孔后焦vph2、21-前焦光强i
vph1
、22-后焦光强i
ph2
、23-差动共焦光强曲线、24-拟合直线l
diff
(z)、25-离焦量δz、26-差动共焦单点光强值i
diff
(δz)。
具体实施方式
[0042]
下面结合附图和实施例对本发明作进一步说明。
[0043]
实施例1
[0044]
如图5所示,后置分光瞳差动共焦曲率半径快速相对测量方法与装置,包括后置分光瞳差动共焦模块、运动控制与监测模块和姿态调整模块。其中,后置分光瞳差动共焦模块使用d形光阑5将ccd探测面7上的光斑设置为虚拟针孔位置,将其轴向光强响应作差动处理,实现对被测元件的精准定焦。后置分光瞳差动共焦模块包括点光源1、准直镜3、反射镜4、会聚镜9、d形光阑5、显微物镜6和光电探测器ccd7。
[0045]
运动控制模块使用伺服电机驱动丝杠12带动高精度气浮导套14沿光轴方向运动,同时使用光栅尺16实时监测位置信息,完成扫描和位置数据采集。运动控制模块包括伺服电机11、丝杠12、高精度气浮导套14、高精度气浮导轨15、光栅尺16。姿态调整模块使用二维调整架8调整标准会聚镜9和被测镜18的空间位置,使其中心与光轴重合,将曲率半径的绝对测量过程,转变为基于样板的相对测量。姿态调整过程利用环形夹具10,将被测件快速而精确地定位于特定样板的共焦位置处。姿态调整模块包括二维调整架8、环形夹具10。
[0046]
当使用该装置进行批量元件曲率半径测量时,采用后置分光瞳差动共焦探测技术得到差动共焦曲线,如图2所示,通过被测元件反射的测量光经过d形光阑5和显微物镜6,成
像在ccd7探测面。探测到的椭圆形光斑,在光轴位置设置圆形探测区域,在共焦两侧对称地设置虚拟针孔19前焦vph1、虚拟针孔20后焦vph2。将虚拟针孔内的灰度值积分作为探测光强,通过探测两个虚拟针孔的轴向光强响应并作差动处理,得到差动共焦响应曲线23,通过线性拟合获得高斜率、长线性范围的拟合直线,以此保证曲率半径测量精度和测量范围。
[0047]
后置分光瞳差动共焦曲率半径快速相对测量方法与装置,采用立式环形装卡10结构保证样板和各个被测件能依靠自身重力实现快速稳定装卡,并保证同批次球面元件装卡后,其球面上相同矢高所对应的纬线(即球面元件与环形卡具的接触线)可重复定位在相同的空间位置。如图5和图6所示,本装置可针对凹、凸球面进行测量。对于凹球面测量,环形卡具的外圆与被测球面接触,如图3所示;对于凸球面测量,环形卡具的内圆与被测球面接触,如图4所示。
[0048]
利用本装置将标定样板和待测元件分别置于同一卡具上,由于二者曲率半径具有微小差异,其球心位置会在光轴方向偏移δzn的离焦量,进而根据离焦量δzn得到待测曲率半径。
[0049]
针对凹球面的测量步骤如下:
[0050]
步骤一:在批量元件中选定与被测镜同批次的样板17,样板的元件参数的名义值和n个同批次被测镜18相同。所述元件参数包括曲率半径、口径、表面反射率。
[0051]
步骤二:利用后置分光瞳差动共焦定焦系统在样板17共焦位置附近进行扫描,对采集到的光强信号进行差动处理得到差动共焦曲线23,对该曲线的线性段进行线性拟合得到拟合直线24,根据24零点的轴向位置坐标将样板17精确位于共焦位置,实现被测元件的精准定焦。
[0052]
步骤三:从立式卡具上取下样板17并依次装卡被测镜18,该过程通过被测镜自身重力保证被测镜18的重复空间定位。对于凹球面测量,环形卡具的外圆与被测球面接触。利用后置分光瞳差动共焦定焦系统采集装卡被测镜18后的差动光强值,并将其映射到拟合直线24进而得到离焦量25,如图3所示。
[0053]
步骤四:根据df的测量值为29.980mm,由标定样板曲率半径r0=-39.1042mm和离焦量δz1=0.0097mm,利用公式,计算得到r1=-39.0963mm,为被测元件凹球面的曲率半径。
[0054]
实施例2
[0055]
如图6所示,后置分光瞳差动共焦曲率半径快速相对测量方法与装置,针对凸球面的曲率半径的测量与图5相似。
[0056]
针对凸球面的测量步骤如下:
[0057]
步骤一:在批量元件中选定与被测镜同批次的样板17,样板的元件参数的名义值和n个同批次被测镜18相同。所述元件参数包括曲率半径、口径、表面反射率。
[0058]
步骤二:利用后置分光瞳差动共焦定焦系统在样板17共焦位置附近进行扫描,对采集到的光强信号进行差动处理得到差动共焦曲线23,对该曲线的线性段进行线性拟合得到拟合直线24,根据24零点的轴向位置坐标将样板17精确位于共焦位置。
[0059]
步骤三:从立式卡具上取下样板17并依次装卡被测镜18,该过程通过被测镜自身重力保证被测镜18的重复空间定位。对于凸球面测量,环形卡具的内圆与被测球面接触。利
用后置分光瞳差动共焦定焦系统采集装卡被测镜18后的差动光强值,并将其映射到拟合直线24进而得到离焦量25,如图4所示。
[0060]
步骤四:根据df的测量值为29.986mm,由标定样板曲率半径r0=39.1mm和离焦量δz2=0.0303mm,利用公式,得到r2=39.10644mm,为被测元件凸球面的曲率半径。
[0061]
以上结合附图对本发明的具体实施方式作了说明,但这些说明不能被理解为限制了本发明的范围,本发明的保护范围由随附的权利要求书限定,任何在本发明权利要求基础上的改动都是本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1