一种射频仿真阵列角精度的验证方法与流程
1.本发明属于射频仿真阵列的角精度测试技术领域,具体涉及一种射频仿真阵列角精度的验证方法。
背景技术:
2.射频仿真阵列是雷达半实物仿真试验的重要组成部分。射频仿真阵列能够接收模拟器输出的目标回波、干扰信号或杂波信号,通过调节回波信号的幅度和相位参数,控制目标回波信号的输出通道,模拟不同的目标、干扰信号的空间输出角位置参数。
3.在射频仿真阵列建设初期,往往需要对阵列的波束合成的角精度进行评估,传统的方法是制作接收机将干涉仪接收的信号进行下变频,由ad采集后经过数字处理后实现角位置的测量。其接收机设计及信号处理算法往往花费大量的时间及精力,在工程应用中也可能出现不稳定情况,影响测量结果。
技术实现要素:
4.本发明的目的在于提供一种射频仿真阵列角精度的验证方法,此角精度验证方法稳定、可靠、快捷,提高了项目交付及验收效率,以解决上述背景技术中提出现有技术中的问题。
5.为实现上述目的,本发明采用了如下技术方案:
6.一种射频仿真阵列角精度的验证方法,包括用于验证射频仿真阵列角精度的硬件架构和用于验证射频仿真阵列角精度的上位机软件,上位机软件通过网口与硬件架构相接,具体包括如下步骤:
7.s1、控制阵列轨迹点,阵列控制计算机控制阵列用多元组模拟出目标轨迹点;
8.s2、多元组波束合成,阵列通过多元组合成轨迹点而合成波束;
9.s3、校准设备天线切换,阵列天线合成波束通过空间辐射至校准设备天线;
10.s4、上位机软件控制校准设备依次切换a、b、c、d四个接收天线,并控制网分测得对应天线的iq数据;
11.s5、判断是否完成所有轨迹点,若没有完成所有轨迹点的验算,则返回s1重新开始,若完成所有轨迹点的验算,则存入数据库,然后运用角精度评估算法解算此数据,计算出实测相应频点的幅度、相位、iq数据;
12.角精度评估算法过程如下:
13.1)对于每次的测试位置,计算该点的理论测量相位差
[0014][0015]
ψ=ksinξ
[0016][0017]
2)根据测得的数据求解出每次测试的方位角相位差为ψm,俯仰角相位差为
[0018][0019]
ψm=arg(m2/m4)
[0020]
3)测量目标位置计算:
[0021]
目标测量位置:
[0022][0023][0024]
测量误差:
[0025][0026][0027]
优选的,所述s3中开关切换通过控制板的网口命令切换。
[0028]
优选的,所述s5中计算该点的理论测量相位差的式
[0029][0030]
ψ=ksinξ
[0031][0032]
中:d为校准设备两个天线的间距;
[0033]
λ为测试信号波长λ=c/f;
[0034]
为理论轨迹的目标俯仰相位差;
[0035]
ψ为理论轨迹的目标方位相位差;
[0036]
ξ为理论目标方位角;
[0037]
ζ为理论目标俯仰角。
[0038]
优选的,所述s5中根据测得的数据求解出每次测试的方位角相位差为ψm,俯仰角相位差为式
[0039][0040]
ψm=arg(m2/m4)
[0041]
中arg(
·
)表示计算复数的相角,m1~m4为校准设备的4个接收天线收到的复数据。
[0042]
以方位角为例,俯仰角同理;
[0043]
ψ
si
=ψ
mi-ψi[0044]
ψ
si
=ψ
mi-ψ
s0
[0045]
将ψ
si
归一化到[-π,π]范围后,成为ψ’si
[0046]
ψ
‘’
si
=ψ
‘
si-ψ’ave
[0047]
且以同样的方法计算
[0048]
优选的,所述s5中为经过相位补偿后的方位相位差和俯仰相位差。
[0049]
优选的,所述硬件架构包括4个接收天线、单刀多掷开关射频开关、控制板和矢量
网络分析仪,上位机软件通过网口与控制板相接,发送控制指令后,单刀多掷开关导通至相应的接收天线,同时上位机软件通过控制矢量网络分析仪得到相应频点的幅度、相位、iq数据,运用角精度评估算法解算此数据,得出角精度评估的实测值。
[0050]
优选的,所述单刀多掷开关和4个接收天线共同构成校准设备。
[0051]
本发明的技术效果和优点:本发明提出的一种射频仿真阵列角精度的验证方法,与现有技术相比,具有以下优点:
[0052]
上位机软件通过网口与控制板相接,发送控制指令后,单刀多掷开关导通至相应的接收天线,同时上位机软件通过控制矢量网络分析仪得到相应频点的幅度、相位、iq数据,运用角精度评估算法解算此数据,得出角精度评估的实测,实现了阵列波束合成的角精度评估,且此角精度验证方法稳定、可靠、快捷,提高了项目交付及验收效率,该方法使得角精度测量工作变得简洁高效,提高了测试效率、减少了测试时间。该方法适用于产品科研、生产、验收等场景。
[0053]
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所指出的结构来实现和获得。
附图说明
[0054]
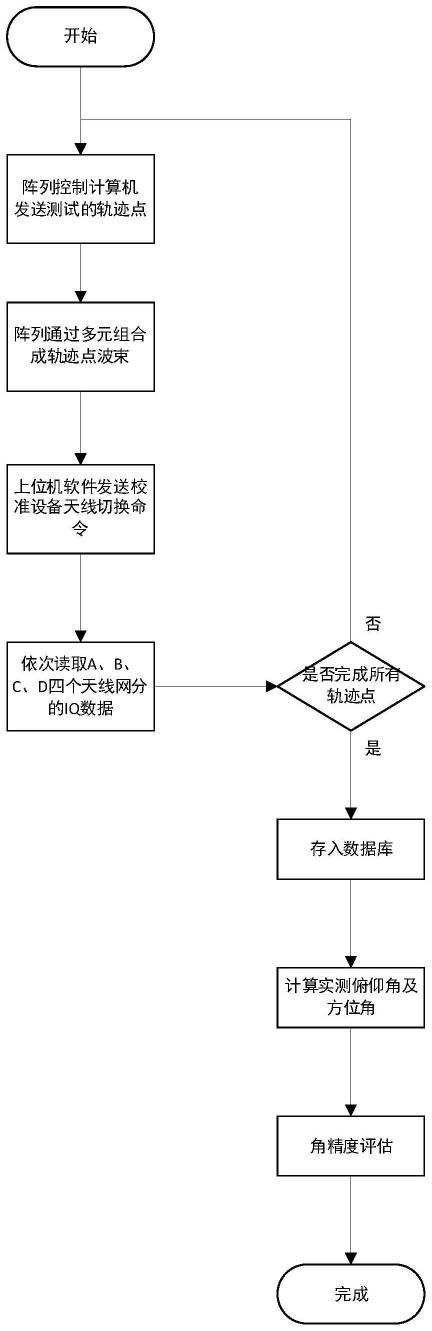
图1为本发明的角精度验证流程图;
[0055]
图2为本发明的角精度验证原理图;
[0056]
图3为本发明的实施例1中阵面位置示意图;
[0057]
图4为本发明的实施例1的读取的部分数据图;
[0058]
图5为本发明的实施例1的横滚向角精度示意图;
[0059]
图6为本发明的实施例1的俯仰向角精度示意图。
具体实施方式
[0060]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0061]
本发明提供了如图1~2所示的实施例:
[0062]
一种射频仿真阵列角精度的验证方法,包括用于验证射频仿真阵列角精度的的硬件架构和用于验证射频仿真阵列角精度的上位机软件,所述硬件架构包括4个接收天线、单刀多掷开关射频开关、控制板和矢量网络分析仪,上位机软件通过网口与控制板相接,发送控制指令后,单刀多掷开关导通至相应的接收天线,且单刀多掷开关和4个接收天线共同构成校准设备,同时上位机软件通过控制矢量网络分析仪得到相应频点的幅度、相位、iq数据,运用角精度评估算法解算此数据,得出角精度评估的实测值,具体包括如下步骤:
[0063]
s1、控制阵列轨迹点,阵列控制计算机控制阵列用多元组模拟出目标轨迹点;
[0064]
s2、多元组波束合成,阵列通过多元组合成轨迹点而合成波束;
[0065]
s3、校准设备天线切换,阵列天线合成波束通过空间辐射至校准设备天线,开关切换通过控制板的网口命令切换;
[0066]
s4、上位机软件控制校准设备依次切换a、b、c、d四个接收天线,并控制网分测得对应天线的iq数据;
[0067]
s5、判断是否完成所有轨迹点,若没有完成所有轨迹点的验算,则返回s1重新开始,若完成所有轨迹点的验算,则存入数据库,然后运用角精度评估算法解算此数据,计算出实测相应频点的幅度、相位、iq数据;
[0068]
角精度评估算法过程如下:
[0069]
1)对于每次的测试位置,计算该点的理论测量相位差
[0070][0071]
ψ=ksinξ
[0072][0073]
式中:d为校准设备两个天线的间距;
[0074]
λ为测试信号波长λ=c/f;
[0075]
为理论轨迹的目标俯仰相位差;
[0076]
ψ为理论轨迹的目标方位相位差;
[0077]
ξ为理论目标方位角;
[0078]
ζ为理论目标俯仰角。
[0079]
2)根据测得的数据求解出每次测试的方位角相位差为ψm,俯仰角相位差为
[0080][0081]
ψm=arg(m2/m4)
[0082]
式中arg(
·
)表示计算复数的相角,m1~m4为校准设备的4个接收天线收到的复数据。
[0083]
以方位角为例,俯仰角同理;
[0084]
ψ
si
=ψ
mi-ψi[0085]
ψ
si
=ψ
mi-ψ
s0
[0086]
将ψ
si
归一化到[-π,π]范围后,成为ψ’si
[0087]
ψ
‘’
si
=ψ
‘
si-ψ’ave
[0088]
且以同样的方法计算
[0089]
为经过相位补偿后的方位相位差和俯仰相位差。
[0090]
3)测量目标位置计算:
[0091]
目标测量位置:
[0092][0093][0094]
测量误差:
[0095][0096][0097]
根据上述的实施例,做出如下的具体的实施例1:
[0098]
1、控制阵列产生目标精度测试轨迹,本次用例选择阵列偏上部分的“横”作为角精度验证的轨迹,频率为12ghz。在阵面位置如图3所示。
[0099]
2、当每个轨迹点发出后,根据校准设备协议控制校准设备中单刀多掷的开关位置,每切换一次开关,读取网分原始iq数据一次,如图4所示。3、通过软件按本实施例的一种射频仿真阵列角精度的验证方法处理最后的采集数据,获得的横滚向角精度数据如图5所示,获得的俯仰向角精度如图6所示。
[0100]
由处理结果可知,此轨迹横滚向角精度范围-3~2mrad,此轨迹俯仰向角精度范围-4~3mrad。对角精度求标准差,最后的横滚向角精度为1mrad,俯仰向角精度为2mrad,因此,该方法使得角精度测量工作变得简洁高效,提高了测试效率、减少了测试时间。该方法适用于产品科研、生产、验收等场景。
[0101]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1